















































软件

产品


摘 要
地球空间信息是人工智能、大数据时代的重要数据基础,轻小型无人机测绘遥感技术作为中国当前和未来获取厘米级分辨率、实时响应遥感数据的主要手段,必将发挥更加重要的作用。本文首先介绍了固定翼、多旋翼、无人直升机以及飞行控制系统、地面监控系统和遥控遥测链路的发展现状和潜在发展趋势;其次重点研究了数码相机、视频摄像机、倾斜相机、激光雷达、合成孔径雷达和定姿定位系统的利用现状和发展趋势;然后总结分析了当前无人机测绘遥感面临的系统检测、大范围实时遥感和遥感大数据精准解译方面的问题和挑战;最后面向人工智能、大数据、物联网、云计算等技术背景给出了轻小型无人机测绘遥感技术在飞行控制智能化、测绘遥感作业智能化和实时、实景无人机遥感技术应用模式创新等方面的发展趋势。
关键词:轻小型无人机测绘遥感系统,测绘遥感载荷,人工智能,大数据
无人机UAV(Unmanned Aerial Vehicle)是一种机上无人驾驶的航空器,具有动力装置和导航模块,在一定范围内靠无线电遥控设备或计算机预编程序自主控制飞行(李德仁和李明,2014)。自1917年第一架无线电控制的无人飞行器诞生,到了20世纪60年代无人机开始应用在侦察领域(Gupta等,2013)。在1979年,Przybilla和Wester-Ebbinghaus开展了基于固定翼无人机的航空摄影测试,1980年该团队使用航模无人直升机开展了历史上首次旋翼无人机航空摄影测试(Colomina 和Molina,2014)。2005年以后无人机测绘遥感技术进入了快速发展阶段(Colomina 和Molina,2014),汶川地震等多次重大自然灾害应急服务展示了轻小型无人机测绘遥感技术令人瞩目的能力(廖小罕和周成虎,2016)。
近年来,轻小型无人机测绘遥感技术在国内外得到极大的重视和发展。在国内,“十一五”以来,科技部在“地球观测与导航领域”支持的“863”计划重点项目、重点研发计划项目、科技支撑项目等与无人机直接相关项目7项,间接相关项目4项,占该领域总项目数的20%(晏磊等,2019)。2009年国家测绘地理信息局在全国31 省级测绘行政主管部门和重庆测绘院开展轻小型无人机航摄系统配备和推广应用工作(毕凯等,2015)。2010年民政部减灾中心联合国内无人机监测的中坚力量,建立了无人机监测队伍的联动机制,以便更快响应重大灾害的应急救灾工作。2011年国家海洋局开始在全国11个沿海省(区、市)各建设一个无人机基地,负责监管辖海域无人机遥感监测。2015 发布的年《全国基础测绘中长期规划纲要(2015年—2030年)》要求重点推进激光、雷达、倾斜摄影等新型传感器数据获取与应用。2016年国家测绘地理信息局发布的《关于进一步加强应急测绘保障服务能力建设的意见》,明确指出将无人机航空遥感平台构建、多类型传感器集成以及地面指挥控制平台配备等作为主要建设任务。2019年,教育部将航空摄影测量和无人机操控与维护专业纳入了《中等职业学校专业目录》,主要开设无人机测绘、地理信息采集、无人机装配、无人机修理、无人机应用、无人机操控等课程。2020年,人社部将“无人机装调检修工”纳入国家职业分类目录。国际方面,从2004年—2006年,美国国家航空航天局(NASA)就对民用无人驾驶飞行器的能力进行评估。美国内政部在2014年发布了“美国地质调查无人驾驶飞机系统(UAS)路线图2014”要求在广阔的土地上获取遥感数据,包括偏远和有潜在危险的地区(Cress等,2015)。欧盟在2007年对无人机的使用领域进行了分析,并认为对地观测与遥感是一个重要的应用方向(Sullivan 和Sullivan,2007;Yao 等,2019)。2018年发布的《欧洲地理空间产业展望报告》在GNSS与定位、GIS与空间分析、遥感3个类别的基础上,增加了三维扫描,并预测该方向成为4个分类中增长最快的市场,将进一步推动无人机实景三维的发展。2019年欧盟发布了无人机通用准则,进一步规范了无人机技术和操作要求。在俄罗斯、日本、加拿大等国家无人机测绘遥感技术也被广泛应用各行各业(Cherkasov 等,2018;Yamazaki 和Wen,2016;Whitehead 等,2014)。在国家政策、科技项目、重大工程项目、突发事件应急救援和巨大的市场需求下,轻小型无人机测绘遥感技术与装备取得了突飞猛进的发展,在测绘、应急、减灾、农林、国土、海洋等多个行业广泛应用(Gonzalo,2015),极大地提升了生产服务的质量和效率。
随着人工智能、云计算、大数据、物联网等高新技术快速发展,地球空间信息科学(李德仁,2016)逐渐迈入了智能化时代,轻小型无人机航摄遥感技术作为地球空间信息数据获取的重要组成部分,迎来了高速发展阶段。为此,本文研究了轻小型无人机测绘遥感系统与测绘遥感载荷的的发展现状,并面向人工智能、大数据、物联网、云计算等技术背景对轻小型无人机测绘遥感系统的一些发展进行展望。
轻小型无人机测绘遥感系统通常由飞行平台、飞控系统、地面监控系统、遥控遥测链路以及遥感载荷等组成。
详细情况如图1所示。本节重点说明无人机测绘遥感系统研究进展。

图1 轻小型无人机测绘遥感系统组成
无人机飞行平台按照翼形结构划分包括固定翼无人机、多旋翼无人机、无人直升机、伞翼无人机、扑翼无人机、无人飞船等(Gupta 等,2013)。受载荷、续航时间、操控复杂度等因素的影响,常用的轻小型无人机测绘遥感飞行平台包括固定翼、旋翼和无人直升机等类型(Watts 等,2012)。本文重点针对常用机型进行介绍说明。
1)固定翼无人机。
该机型是指比空气重,有动力装置驱动,机翼固定于机身且不会相对机身运动,靠空气对机翼的作用力而产生升力的无人航空器。从翼形结构来看,通常拥有机翼、尾翼等部件或三角翼等,常采用滑跑、弹射等方式起飞,以及滑跑、伞降等方式降落。搭载数码相机的固定翼轻小型无人机测绘遥感系统是在中国测绘领域发展、产业化推广应用较早的机型(毕凯等,2015)。
在中国西部1∶5 万地形图测图工程中,中国测绘科学研究院利用固定翼无人机航摄遥感技术手段,获取了噶尔、萨嘎等西部34个县1375 km2优于0.5 m 分辨率无人机影像,并制作1∶1 万DOM数据,填补了中国西部地区1∶5万比例尺地形图数据的空白(《西部测图工程纪实》编委会,2012),技术路线和部分成果如图2和图3所示。
2007年北京航空航天大学利用“雪雁”固定翼无人机系统,获取了南极中山站附近10 km2的正射影像(廖小罕和周成虎,2016)。中测新图公司采用续航时间长达30 h的ZC-5长航时固定翼无人机测绘遥感系统,先后开展过钓鱼岛及其附属岛屿、西沙东岛和七连屿等远离大陆海岛礁测绘工作,首次制作钓鱼岛及其附属岛屿1∶2000 比例尺地形图,填补了历史空白。
荷兰瓦格宁根大学利用固定翼航摄系统开展了高分辨数字表面模型研究(Anders 等,2013)。
2013年芦山地震发生后8 h 内获得第一幅无人机遥感影像(廖小罕和周成虎,2016),并通过卫星报送至国务院应急办、国家减灾委、国土资源部、中国地震局和四川省有关部门等,用于指挥决策和抢险救援。日本东京大学基于固定翼无人机图像开展了针阔混交林树冠的特征评估方法研究(Jayathunga 等,2018)。2018年—2019年北京市测绘设计研究院采用无人机系统对2022年冬奥会高山跳台滑雪场地建设进行了定期监控。
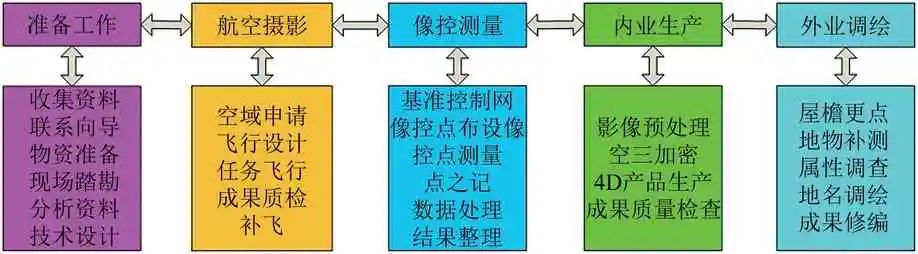
图2 轻小型无人机在西部测图项目中应用路线图
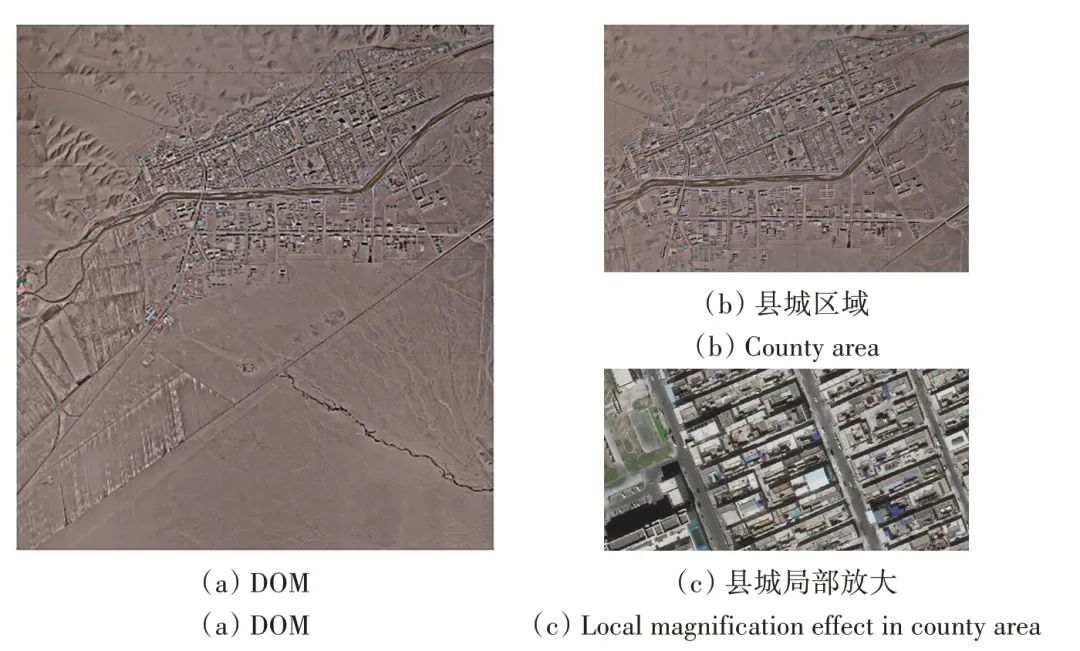
图3 西藏噶尔县无人机航空正射影像图
固定翼无人机测绘遥感系统通常具有有效载荷大(平均5 kg)、续航时间长(2—30 h)、升限高(4000 m以上)等优势,是执行100 km2以上作业面积或者海岛礁测绘等需要长距离飞行的测绘遥感任务的首选机型。
但是该类型无人机通常对起降场地有较高的要求,比如滑跑起降时需要宽阔平直的场地以及较好的净空条件等,导致该类型无人机平台在山区等地形复杂区域使用受限。随着飞行控制、材料技术的逐渐进步,以及使用要求的不断提高,现阶段,该类型无人机飞行平台的发展呈现出3种趋势:
1)传统机型方面,技术成熟度更高、产品质量更好、机型种类更丰富;
2)随着瑞士eBee无人机、拓普康天狼星无人机以及深圳飞马公司生产F1000无人机等手抛型固定翼无人机航摄遥感系统的推广应用,推动最大起飞重量不超过7 kg 的无人机平台朝着更加智能化、方便灵活的方向发展;
3)随着成都纵横CW系列垂直起降型固定翼无人机航摄遥感系统(杨梦琳等,2019)在测绘遥感领域的应用,改变了固定翼无人机测绘遥感系统对起降场地的要求,在保障有效载荷和航时的基础上,可以实现米级范围精准起降,降低了对操控人员的依赖程度。然而为了更好的推广应用,具备一键起降等人工干预少的作业能力需要继续提升。
2)多旋翼无人机。
该机型是靠螺旋桨转速的变化,来调整力和力矩,从而实现多旋翼无人机的飞行运动控制。虽然第一架多旋翼无人机早在20世纪初就被研发出来,但是实际使用效果并不理想。进入新世纪以后,随着中国大疆、德国Microdrones、法国Parrot 等公司生产的多旋翼无人机逐渐推入市场(田宇等,2016),凭借垂直起降、定点悬停等特点,带动了多旋翼无人机测绘遥感行业应用的热潮。中测瑞格公司以大疆公司的M600pro旋翼无人机飞行平台为基础,构建了多类型旋翼无人机LiDAR 测绘系统。2018年天津中航通推出了一款续航时间超过7 h 的油电混合多旋翼无人机owling。斯图加特大学的Niethammer 等(2012)利用旋翼机对法国Super-Sauze滑坡表面裂缝和位移进行了分析。Remondino 等(2011)利用旋翼无人机在意大利Veio archaeological 区域等开展了考古活动。中科院利用旋翼机进行冰川监测,获取了空间连续的高精度DEM 和DOM 数据,很大程度上提升了冰川监测的效率,降低作业强度(刘宇硕等,2020)。
多旋翼无人机具有定点悬停、垂直起降、超低空飞行以及贴近建(构)筑物等地表物体绕飞的飞行能力,平均可以搭载3—8 kg 的有效载荷,在测绘行业该类型无人机平台常搭载数码相机、倾斜摄影相机和LIDAR 等传感器,制作高精度、高分辨的测绘产品,尤其是在高楼倾斜摄影、电塔巡检等高度快速变化的复杂应用场景遥感测绘方面发挥了重要作用。但现阶段纯电动多旋翼无人机通常续航时间一般不超过1 h,尤其是在超过500 m 相对高度作业时,快速的爬升阶段对电力的消耗较大,成为影响旋翼机发挥更大作用的主要因素。另外在城市楼宇、山区等复杂地形贴近目标物体或地表飞行时,面临着障碍物检测与规避的技术难题,也在一定程度下限制了多旋翼无人机在狭小空间的测绘能力。
3)无人直升机。
无人直升机是指由无线电地面遥控飞行或/和自主控制飞行的可垂直起降(VTOL)不载人飞行器,在构造形式上属于旋翼飞行器,在功能上属于垂直起降飞行器。该类型无人机的研制始于20世纪50年代初,美国、英国、德国等国家率先对无人直升机进行研究,中国早在“七五”和“八五”期间开始无人直升机研制和应用(王海和徐国华,2003)。在遥感测绘方面,武汉大学在2010年成功试飞国内首台遥感无人直升机。2017年中航工业直升机所研制的AV500 无人直升机在河北省高碑店市完成了为期7 d 的“无人直升机航空应急测绘系统”演示飞行的所有科目(Hk,2017)。另外,随着“国家应急测绘保障能力建设项目”的开展,河北、黑龙江、陕西、海南、江西、新疆、江苏等地理信息部门均在装备Z-5等无人直升机测绘遥感系统。Arnold等(2012)利用奥地利Schiebel 公司的S-100 无人直升机开展了多光谱环境监测。在澳大利亚Merz和Chapman(2011)提出一种基于CSIRO 无人直升机遥感系统设计方法。陈天恩等(2012)基于日本富士重工研制的RPH2无人直升机,开展带有差分GPS 的多传感器无人直升机航测遥感系统研制。信息工程大学薛武等(2019)开展了无人直升机面阵影像高精度对地定位研究,结果表明无人直升机直接地理定位的精度可满足应急条件下测绘保障要求;少量地面控制点的辅助下定位精度远优于1∶500比例尺地形图测图的要求。
无人直升机测绘遥感系统兼具垂直起降、定点悬停,以及有效载荷大,通常可达30 kg以上、续航时间长,一般超过2 h、可以同步搭载实现多种测绘遥感传感器等特点,具有广阔的应用潜力。但是,受成本、操控复杂度等因素影响,相比固定翼、旋翼无人机测绘遥感系统,无人直升机测绘遥感系统装备和市场占有率相对较低(贲亮亮和王鹏,2018)。因此急需提高智能控制技术水平,降低操控复杂度,提升成熟度与普及程度。
飞行控制系统是无人机的“大脑”,是无人机完成起飞、空中飞行、执行任务和返场回收等整个飞行过程的核心系统,担负着姿态控制、航迹控制、载荷设备控制、故障检测等重要任务,常采用人工遥控、程序控制和指令控制(人机混控)3种方式(Pastor等,2007)。从导航方式来前,多数无人机的导航方式主要依靠卫星导航系统、惯性导航系统(INS)、地磁传感器、气压计等组合导航。卫星导航系统多为GPS、GLONASS、Galileo 和北斗导航系统(Yang 等,2014,2018)组合导航,少量无人机集成有视觉和超声波雷达,用于起降阶段的高度判断和障碍物监测,如南京航空航天大学单一开展了基于视觉导航的四旋翼无人机自主着降控制研究(单一,2018)。北京零度智控公司研制了polaris 三余度自动驾驶仪。成都纵横公司研制了MP、NP、AP系列无人机飞控系统,基于差分GNSS技术,可以实现无人机亚米级精度降落位置控制。西班牙LóPEZ 等(2015)开展了基于H ∝鲁棒算法的无人机飞控控制算法研究。纳米比亚Zulu 和John(2014)研究了旋翼机常用的PID 等11种控制算法的优缺点,并提出了混合定位算法。基于APM和Pixhawk等开源技术自制的飞控系统也成为国内外学者研究的热点(万宇楼等,2018;李松炜等,2019)。为了保障飞行的安全性和降低对操作人员的要求,多余度飞控设计技术(杨蕊姣,2015;薛亮,2016)和“一键起降”控制技术。虽然现阶段无人机的飞控系统的智能化水平在不断提升,但是在“傻瓜式”操控、超低空飞行障碍物检测与规避、应急救援多飞行器协同飞行、大阵风/强侧风等条件下的航线精准保持等方面仍然需要进一步的提升与完善,以便更好的减轻操控人员压力,提升原始测绘数据的质量。
地面监控系统通常由地面监控计算机、地面通讯链路设备、航线规划软件以及飞行监管软件等组成。本文重点介绍航线规划软件的发展情况。航线规划软件主要作用是规划无人机的飞行路径、传感器工作位置等功能。通常需要顾及地形、影像重叠度、无人机转弯半径、影像分辨率、传感器参数等指标进行规划。中测新图公司开发的TOPPLAN软件,具备支持相机、倾斜相机、视频、LIDAR、SAR等多种传感器作业的功能,尤其是具备定点曝光的功能。中国地质大学(北京)安江航(2018)开展了单镜头无人机倾斜影像采集航线规划APP 研发。国防科学技术大学李远(2011)开展了多UAV 协同任务资源分配与编队轨迹优化方法研究。葡萄牙波尔图大学Sujit 等(2013)开展了无人机角度约束地形测绘的无人机航线规划路径规划研究,提出了一种多边形分解算法来生成精确的飞行路线。土耳其Sancı(2011)提出另一种GPU 并行加速算法,提高了航线规划效率。南昌大学罗旋(2019)基于鱼群算法提出了无人机电力巡检航线规划方法。南京大学陈星(2018)开展了无人机多目标航线规划方法,研究表明改进的蚁群算法能缩短多无人机之间路径规划的距离。现阶段,航线规划技术已经能够解决大多数场景下的测绘需求,但是针对复杂情况仍然存在以下3个方面的不足:
1)多传感器融合的无人机测绘遥感系统或者一机多传感器切换使用时,兼顾多传感器特点的航线规划软件发展滞后;
2)在应急等情况下同空域多架次无人机组网飞行的应用场景,协同规划技术存在较大的不足;
3)针对地表起伏较大的地形,能够顾及地表起伏、自动分区、同步规划航线的软件需要开发。
遥控遥测链路是无人机系统的重要组成部分,是飞行器与地面系统联系的纽带。轻小型无人机常用的遥控遥测设备包括遥控器(杆)电台、数传电台、图传电台等。其中遥控器电台,主要用于遥控指令上传;数传电台通常用于无人机程控指令和飞行参数的传输;而图传电台主要用来将机载传感器获取的视频、图像等数据回传,如图4所示。本文重点针对图传电台进行说明。中国电子科技集团公司第五十四研究所、天津航天中为数据系统科技有限公司等单位在研制50—200 km距离的无人机图传设备方面具有较强的技术实力。正唐科技、蓝波视讯等公司研制的通讯距离在50 km以内的数传设备具有较好的市场应用。另外3G/4G 等技术也是无人机图像传输的主流技术方法,但是受到基站位置和天线朝向等因素影响,只有在基站密集以及300 m以下的飞行高度能够获得稳定的数据传输性能。3G/4G通讯技术常与短波通讯技术搭配使用,遥测数据通过短波电台传输至地面,然后通过3G/4G通讯技术转接至指挥中心等。基于卫星的通讯技术也在彩虹4、鹞鹰系列等中大型无人机平台使用。受到轻小型无人机遥感载荷的限制,目前常用的设备重量通常在0.25—1 kg,然而对体积、重量和功耗较大的遥控遥测设备与轻小型无人机平台的集成与使用仍然存在一定难度。从传输能力来看,市场常见的用于视频、图像等数据传输的通讯带宽通常为2 Mbps、4 Mbps、8 Mbps,少量的L、S 和C波段的链路做到10 Mbps以上,现阶段可以实现1080 P全高清视频流、压缩影像等数据的实时传输,大带宽设备可以实现SAR 数据实时传输(彭湛博,2018;刘荣科和张晓林,2000)。随着5G(5th generation mobile networks)以及卫星通讯技术的快速发展,将会在无人机测绘遥感系统远距离遥控以及大带宽数据的实时回传等方面发挥重要的作用。
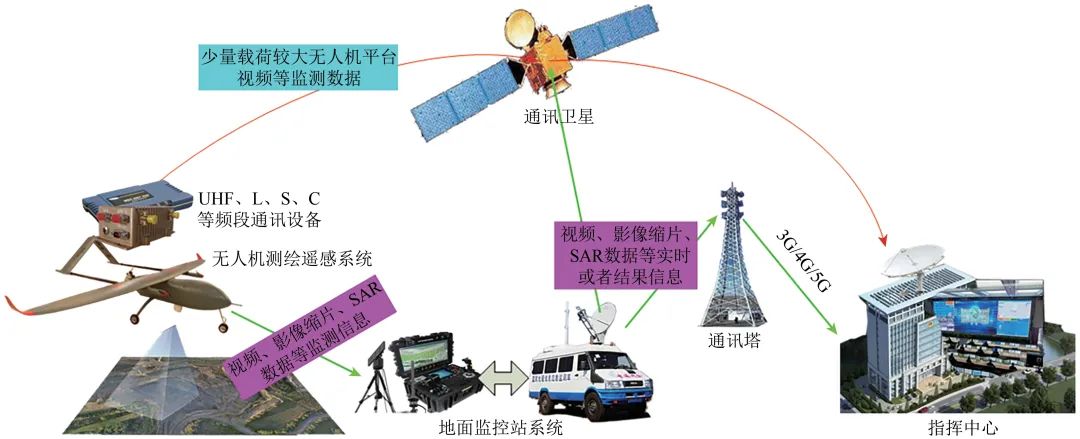
图4 遥控遥测链路在轻小型无人机测绘遥感中的应用路线图
现阶段常用的遥感载荷主要有数码相机、视频摄相机、激光雷达(LiDAR)、合成孔径雷达(SAR)以及定姿定位(POS)系统等设备。详细情况如图1所示。
数码相机是集光学、机械、电子一体化的产品。光线通过镜头或者镜头组进入相机,通过数码相机成像元件转化为数字信号,数字信号通过影像运算芯片储存在存储设备中(李海启,2009)。20世纪90年代初,轻小型无人机平台常将35 mm 或者70 mm 的胶片相机作为传感器(宣家斌 等,1994;姜跃祖 等,1992)。从1969年第一台“CCD”器件(电荷耦合器件)在美国贝尔研究所面世(陈述,2006),1975年,柯达生产了第一台数码相机。到了2000年前后,数码相机在幅面和参数调整等方面发生了较大改善,中国空间技术研究院、中国测绘科学研究院、长春光学精密机械与物理研究所、武汉大学等单位开始将数码相机应用在无人机测绘遥感技术研究等方面(崔红霞等,2005)。常用的光学相机多为经过精确标定(李英成等,2015;崔红霞等,2005;Zhang,2000)的佳能、尼康、索尼、宾得等135 型非量测型数码相机以及飞思、哈苏等量测型数码相机。近年来,佳能、尼康、索尼等品牌的135 数码相机最高像素均超过4000 万像素。量测相机方面,继哈苏在2008年推出超过5000 万像素的H3D II-50量测相机后,飞思推出了超过1.5亿像素的XF IQ4 相机。虽然量测型数码相机具有优异的影像质量、作业效率、测绘精度等特点,但是受重量、体积、价格因素影响,市场占有率比较低。数码相机常用来生产1∶500—1∶2000比例尺的正射影像图(DOM)、数字高程模型(DEM)、数字线划图(DLG)以及影像快速镶嵌图等产品(国家测绘局,2010a,2010b),已经被广泛应用在测绘、应急、减灾、农林、国土、海洋等多个行业。未来,随着数码相机的幅面不断提升,会进一步促进无人机测绘精度和效率的提升。
视频摄像机作为一种流媒体传感器,能够实时获取目标区域的动态视频,监测信息更为直观,在应急测绘等领域具有较高的应用价值(李德仁,2013)。目前常用的传感器多为索尼、尼康等数码相机的摄像模式,索尼、海康威视和浙江大华等公司生产的视频摄像机机芯集成的光电吊舱,以及Gpro 运动相机等。在测绘应用方面,2007年瑞士西北科技大学Eugster 和Nebiker(2008)提出一种将微小型无人机系统捕获的视频图像实时和离线集成到虚拟地球中的解决方案。2009年,Zhou(2009)基于无人机视频开展了准实时的影像纠偏和拼接技术研究。在2014年武汉大学任超锋(2014)开展了基于航空视频影像的正射影像制作关键技术研究,实现了无定姿定位系统POS(Position and Orientation System)条件下的视频关键帧影像空间结构自动重建以及基于关键帧的正射影像制作方法。解放军信息工程大学薛武(2014)开展了无人机视频地理信息定标与直播处理技术的研究,实现了基于视频数据的应急条件下直接地理定位以及基于视频数据的精细三维建模等工作。2016年,中测新图公司开展了无人机视频流与时空信息融合、地理编码以及与三维场景融合等技术研究,实现了视频流实时与GIS系统关联、分析等功能(李英成等,2018;孙新博等,2018),该技术在“国家应急测绘保障能力建设项目”中应用。德国Saur 和Krüger(2016)利用无人机视频开展了基于图像特征的地表变化监测方法研究。福建农林大学、中科院遥感所与神华地质勘查公司联合开展的无人机视频影像林地单株李牧信息提取研究,实现了油松林区和樟子松林区单株立木识别总体精度分别为89.52%和95.65%、单木树冠提取精度分别为81.90% 和95.65%,均具有较好地适用性(董新宇等,2019)。随着图像数传技术、高分辨视频摄像技术的快速发展,以及无人机视频数据与GIS 数据融合,将会进一步发挥视频数据实时性的特点,促进在应急测绘等对时间敏感的应用场景中发挥更加重要的作用。
倾斜摄影技术是近十几年发展起来的一项高新技术,该技术通过从1个垂直、4个倾斜视角采集影像,获取到丰富的建/构筑物顶面及侧视的高分辨率纹理。常用来真实地反映地物情况,高精度地获取物方纹理信息,以及构建真实的三维模型,同时可以生产标准测绘产品。无人机倾斜相机是在有人机倾斜摄影技术基础上发展而来,目前常用的无人机倾斜相机多为索尼、佳能、尼康、宾得等工业数码相机进行二次开发集成的倾斜相机(毕凯等,2017;李英成等,2017)。除了五镜头的倾斜相机,另有以武汉大势智慧公司的双鱼两镜头、红鹏公司的小金牛三镜头组合的倾斜相机,通过摆动或者飞行垂直航线的工作方式,来获取建/构筑物的倾斜影像(赵家乐和王森,2017);以及德国罗斯托克大学开发了四镜头无人机倾斜相机(Grenzdörffer 等,2012);2016年美国Lead′Air 公司宣布计划利用索尼单反生产了9 镜头倾斜相机,相比五镜头或者更少镜头的倾斜相机,在作业时有效降低了旁向重叠度,且提升了三维模型的精细化程度。但是受重量、体积等因素影响,在轻小型无人机平台应用,仍然需要进行小型化和轻量化改造工作。2016年—2019年,重庆市利用无人机倾斜摄影技术等,构建了全市范围0.4 m 分辨率的实景三维模型,有力的支撑了精准扶贫、自然资源生态保护、城市品质提升、历史文化资源保护、城市精细化智慧化管理等工作。2017年—2019年,北京市立项了“北京市泥石流沟精细调查与评价”项目,利用无人机倾斜摄影技术对北京市密云区、房山区等10个区县的泥石流沟开展了分辨率优于0.05 m 倾斜航拍和三维建模工作,全方位掌握泥石流沟谷发育特征,科学评价其危险性和风险性,建立北京市泥石流沟预警模型,为科学精准防治地灾灾害,优化预警系统奠定基础。随着无人机倾斜摄影技术的快速发展,将会成为实景三维技术的重要数据采集手段。
激光雷达系统LiDAR (Light Detection and Ranging)是一种采用激光作为辐射源的雷达系统,集激光、全球导航卫星系统GNSS (Global Navigation Satellite System) 和惯性导航系统INS(Inertial Navigation System)3种技术于一体,能够真实准确地反映地形地貌,获得1∶500—1∶2000等大比例尺DEM、DSM、三维模型等数字产品(廖小罕和周成虎,2016),以及进行地表分类研究(张继贤等,2017)等,如图5所示。因此相关测绘产品对LiDAR 的测距范围和精度、点密度以及穿透能力提出了较高的要求。目前常用的无人机激光雷达有奥地利Regel、美国Faro、Velodyne、中国北科天汇等公司推出的激光雷达产品。另外美国ASTRALiTe 公司研发了适用于无人机平台的世界上第一个小型地形和水深扫描激光雷达edge,可以探测小型水下物体,测量浅水深度(武汉大学测绘学院,2019;Astralite,2019)。法国YellowScan公司推出总重量1.5 kg,相对精度3 cm,绝对精度5 cm 三维数据采集LiDAR系统Suveyor。英国Routescense 公司基于Velodyne HDL-32e 激光器研发了适用旋翼无人机平台的LidarPod 产品(Routescene,2019)。武汉大学杨必胜和李健平(杨必胜和李健平,2018)基于Velodyne 16线激光扫描仪研制了珞珈麒麟云轻小型无人机激光扫描系统,可在无地面控制下获取精度20cm以内的激光点云。澳大利亚塔斯马尼亚大学Wallace(2012)等利用搭载Ibeo LUX 激光器的无人机激光测量系统开展森林资源调查。武汉大学杨必胜、中国测绘科学研究院刘正军以及广东电力科学研究院联合研制的无人机LiDAR 巡检系统在南方电网得到应用和推广。中测瑞格公司基于regel VUX-1 UAV等激光器集成了多款无人机激光雷达系统,在国内广泛推广。数字绿图研发的LiHawk、LiAir V 无人机激光扫描系统,在测绘领域广泛应用。随着无人机LiDAR 测绘技术的不断发展,将会成为三维建模、高精度地图获取、电力巡检、森林资源调查和土方量评估等方面的主要技术手段。
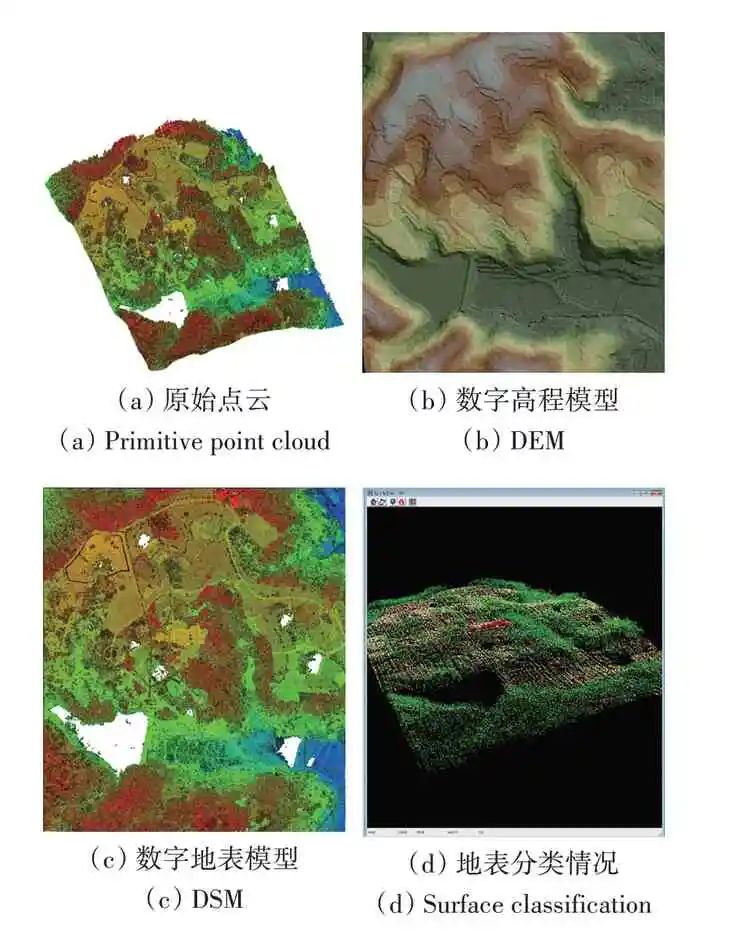
图5 基于无人机激光雷达的测绘成果(结果由“点云催化剂软件”处理完成)
合成孔径雷达SAR(Synthetic Aperture Radar)是一种利用微波进行成像感知的传感器,不受云、雨、雾、雪等天气影响,能够全天时、全天候地获取地表的高分辨图像(梁福来,2013),是进行地形测图的重要手段之一(郭华东,2000;张继贤等,2013)。成像方式主要有条带式和聚束式两种。美国诺斯诺普·格鲁曼公司、通用原子能公司、欧洲EADS Astrium 公司、中科院电子所、西安电子科技大学、北京理工大学等多家企业、科研院所、高校等开展了微小型SAR的技术研究工作(刘亮和吉波,2014)。欧洲EADS 公司在2003年推出了重量4 kg 的Ka波段无人机SAR系统,可获得0.5 m×0.5 m 分 辨率 的图像(Edrich 和Weiss,2008)。巴西Remy 等(2012)2008年开始研制首个适用于无人机平台的P波段和X波段干涉SAR系统,重量30 kg,X波段和P波段的影像分辨率分别为0.5 m×0.11 m和1.5 m×0.3 m。中国科学院电子学研究所在2011年研制出了重量1.8 kg 的国内首套Ku波段和Ka波段SAR系统,分辨率可达0.15 m。2019年推出的W波段MiniSAR 样机重量0.14 kg,功率15 W,最大成像距离500 m,成像分辨率0.086 m(Ding 等,2019)。德国Maxonic 公司研制的W波段SAR,成像分辨率为0.15 m,并在无人直升机上进行了技术验证,取得了较好的成图效果(Essen 等,2012)。中国测绘科学研究院2016年利用无人机SAR 测图系统获得了海陵岛的全极化SAR 图像,以及在2017年在山西省吉山县开展了SAR 1∶2000 三维测绘试验,结果表明能够满足测绘分辨率和精度要求,如图6和图7所示。另外美国喷气实验室2018年研制了一个无人机上实时SAR 处理系统,可以实现25 MB/s 原始L波段的实时处理,并将数据转换为连续条带图图像,且功耗不超过8W (Hawkins 和Tung,2019)。2018年中航工业雷达所展示了Falcon-Z19、Falcon-Z9和Falcon-200等重量从4 kg到45 kg的无人机SAR系统,具备条带式或者聚束式的成像模式,分辨率最高可达0.1 m×0.1 m。瑞士Fery(2019) 等研究了基于无人直升机的L波段重复轨道SAR 测图系统,结果表明能够取得较好的干涉效果。因此,无人机SAR 测图系统能够解决受云雾等气候条件影响地区的高精度测绘问题。

图6 海陵岛全极化SAR图像和沿海农场的提取结果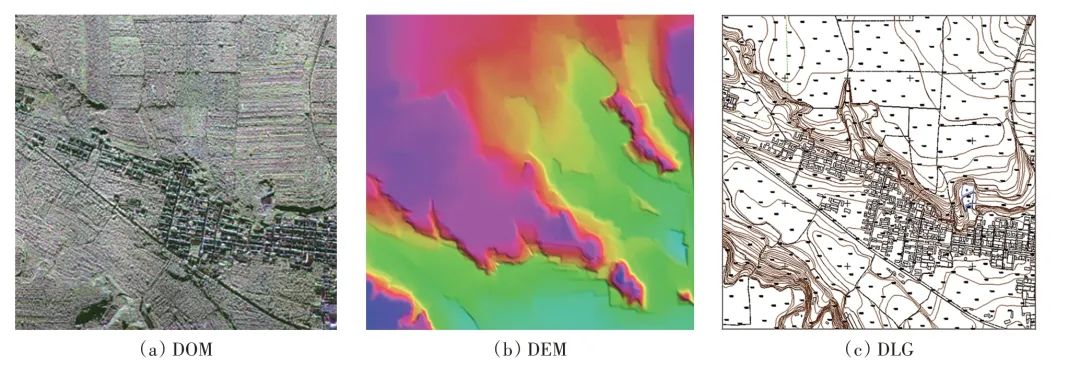
图7 轻小型无人机MiniSAR影像制作的1∶2000测绘产品
定姿定位系统(POS)是集成DGNSS(Differential GNSS)和INS 于一体,获取摄影曝光时刻航摄仪的空间位置和姿态(袁修孝,2008;袁修孝等,2006)。POS 辅助航空摄影测量可以减少甚至免去空三加密及繁重的野外控制工作,极大地缩短成图周期,降低了费用,更可解决无法布设地面控制点地区的成图问题(国家质量监督检验检疫总局和中国国家标准化管理委员会,2011;郭大海,2009;张欣欣 等,2019)。POS系统用于航空遥感对地目标定位有两种方式:集成传感器定向(ISO)和直接传感器定向(DG)两种方法(郭大海等,2004;李学友,2005)。武汉大学朱晓康(2018)研究了估计相机曝光延迟的无人机POS 辅助空中三角测量技术,实现了轻小型无人机1∶500 免像控大比例尺测图。目前常用的POS 设备主要为加拿大Applanix 公司和Novatel 公司的相关产品,以及国内立得空间、北斗星通公司、际上导航等公司生产的产品。北京建筑大学王坚等(Han 等,2015,2017)研究的GPS/BDS/INS 紧耦合算法,算法原理如图8所示,采用MEMS惯性器件可以实现厘米级绝对定位精度,以0.025°姿态和0.08°的航向精度,价格比国外同类型产品降低60%以上。台湾Chiang 等(2012)开展了基于MEMS 器件POS系统的无人机直接地理定向技术研究,在300 m 飞行高度实现了平面5 m定位精度。加拿大MIAN 等基于MEMS POS 开展了无人旋翼机条带测图精度分析,在仅有1个控制点的情况下单条航带采用ISO模式实现0.079 m量级水平定位精度,0.255 m 高程定位精度,采用DG模式实现了0.116 m水平定位精度,0.391 m高程定位精度(Mian 等,2016)。除了POS系统外目前常用双频GNSS 测量传感器曝光时刻的位置信息,作为外方位元素的初始线元素进行辅助空中三角测量(袁修孝,2001;李英成等,2012)。常用的双频GNSS设备包括美国天宝公司、加拿大Novatel公司、中国北斗星通、比逊电子等公司的产品。POS系统是用LiDAR 和SAR 传感器测绘时不可或缺的辅助设备。未来定姿定位系统小型化、轻量化以及与其他遥感设备的深度集成将会成为在无人机测绘遥感方面的主要方向。
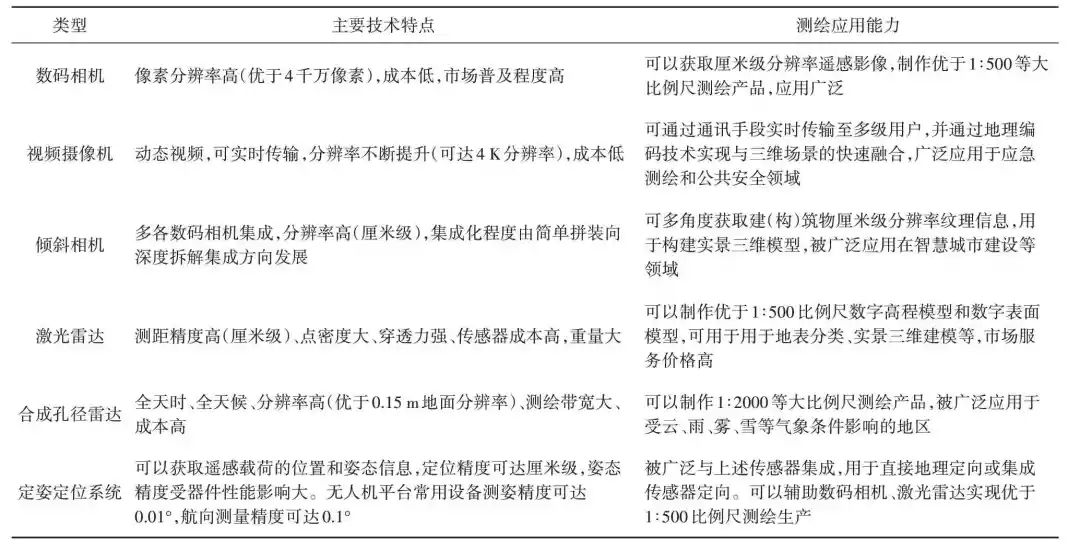
表1总结概括了上述无人机测绘遥感载荷的主要技术特点和测绘应用能力,详细情况如表1所示。
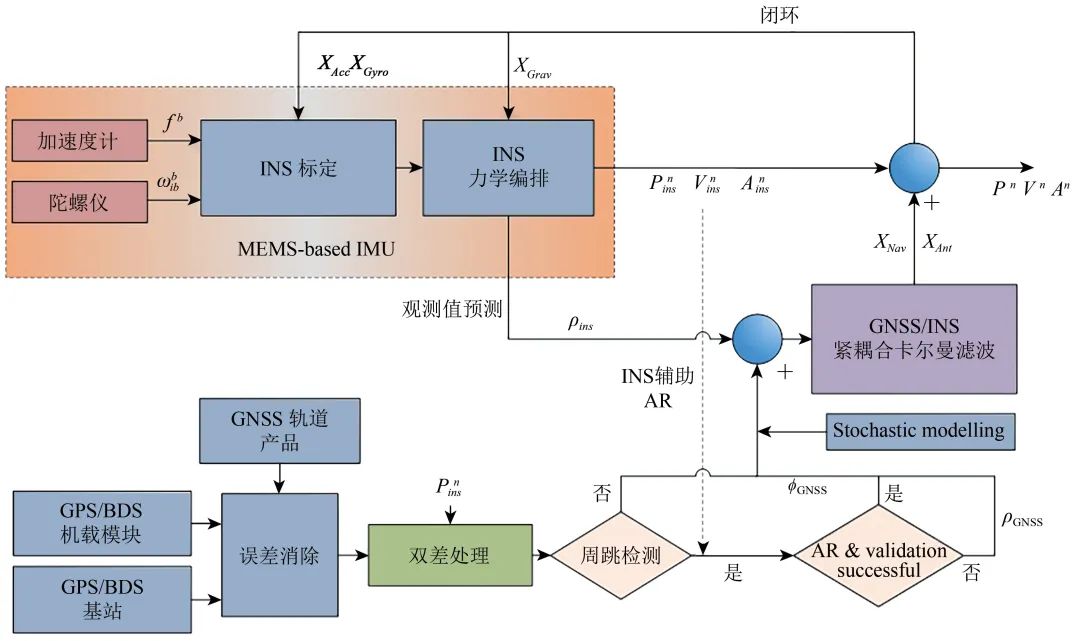
图8 基于载波相位的GPS/BDS/INS紧耦合原理
表1 无人机测绘遥感载荷性能特点
虽然上述测绘遥感载荷在测绘工作中发挥了重要作用,但是除了数码相机检定和无人机数据获取与生产规范已有行业标准,然而针对LiDAR、SAR 新型传感器与无人机系统的检测检校与标定尚属空白,传感器与无人机平台的检测检验与标定参数完全依赖厂家提供,存在检测标定项不一致、指标表述不统一等问题,导致测绘成果质量存在问题时无法溯源,一定程度地限制了新型技术装备的发展。
目前,中国轻小型无人机测绘遥感技术研究、产业化装备、市场应用等方面均已取得显著进展,但是也存在许多不足之处,主要问题如下:
1)无人机测绘遥感系统检测业务完善。无人机测绘遥感系统广泛应用,但是无人机测绘遥感系统性能指标检测方法、手段和标准体系不完善,急需开展影响测绘应用场景与成果质量的无人机环境适应性、飞行性能、导航控制精度以及电磁兼容等性能的检测技术与方法研究,构建适用于测绘遥感无人机系统的标准检测流程。
针对倾斜相机、视频、LIDAR 和SAR 等新型测绘传感器的推广应用,需要研究倾斜相机同步曝光控制、影像存储成功率检测技术,视频流时空编码同步性检测技术,机载LiDAR 测距、测角和加工误差标定方法,机载微型SAR 的辐射、极化、几何等参数定标方法等,构建无人机传感器的检测检定技术工艺,规范无人机测绘遥感系统准入行为,促进轻小型无人机测绘遥感精度不断提高。
2)大范围实时无人机测绘遥感技术提升。基于5G、北斗短报文通讯功能、天通卫星、天链卫星等通讯技术,探究覆盖全球、全空域、全地域的无人机业务实时监管技术体系。研究构建面向应急救援视频、影像等测绘数据的实时多级传输以及海洋、戈壁环境监测信息实时回传技术方法,推动无人机测绘遥感技术朝着实时化方向发展。
3)无人机测绘遥感大数据精准解译。现阶段每年通过无人机测绘遥感系统获取的数据多大PB级以上,多数被用于生产标准的测绘产品,但是在数据挖掘分析方面仍显不足。因此,需要基于机器学习、人工智能、大数据等先进理论方法,探索无人机高分辨遥感大数据挖掘、分析技术方法,研究建立多样化、深层次、精确遥感数据解译模式,让“休眠”的数据流动起来,变成“会说话”的载体,发挥更加重要的作用。
近年来,人工智能、5G、云计算、深度学习、边缘计算、大数据等新理论、新技术的不断突破与进展,以及自然资源、应急管理和公共安全等领域的需求不断提升,有力推动中国轻小型无人机测绘遥感技术从现阶段的飞行到智能化时代的飞行、感知、交互并行方向发展,促进传统的测绘遥感产品专业化应用向大众化应用方向的拓展。
1)无人机飞行控制智能化。随着卫星、惯导、视觉、超声波等多传感器融合导航定位技术的发展,将逐渐改变现阶段卫星、惯导组合的导航定位模式,主动增加无人机飞行环境感知和实景导航的能力,如穿梭在高楼大厦之间的倾斜摄影无人机可以发现楼宇间的建筑物等障碍物;翻越山岭飞行的固定翼无人机能够自动检测山体与飞行高度之间的相对高度,远海岛礁作业的无人机系统能够检测出摄影区域与实际地面范围的不符合情况等。
2)无人机测绘遥感作业智能化。随着人工智能、深度学习、边缘计算、通讯技术和微型计算机能力的提升以及在无人机测绘作业过程中的深度应用,将会极大提升无人机测绘遥感作业的智能化交互控制水平。如飞行过程中自动感知导航、控制等器件故障,启用冗余器件或者自动选择场地降落保障飞行安全;针对地震、大型火灾现场同一空域多架次同步飞行,能够实现多机之间的相互感知和信息交互,实现自动组网飞行,提高数据获取效率;针对无人机在顺风、逆风和侧风条件下造成的飞行速度与姿态变化,导致影像重叠度和影像姿态不满足要求的问题,能都自动的根据风速和风向调整飞行速度和姿态,获取高质量的影像数据。
3)实时、实景无人机遥感技术应用模式不断发展。随着物联网、云计算、5G 等技术的快速发展,以及“实景三维中国”需求的不断提升,用户可以通过实时获取的无人机遥感数据通过5G技术、物联网技术与虚拟现实、增强现实结合起来,提供身临其境的技术服务,如在山林防火着火点查找以及灭火队员搜救、地震等突发自然灾害应急救援现场情况监视等领域提供第一视角实时的真实信息;另外,将获取视频流、影像、倾斜摄影数据以及实时拼接全景影像等与“天地图”等数据平台的融合,通过在线信息挖掘与技术服务满足更多人的导航、信息查询需求,提升对非地理信息专业人员的信息服务水平,满足多层级地理信息服务需求。
中国轻小型无人机测绘遥感技术快速发展,技术水平和产业规模均处于国际先进水平,形成了继卫星、通用航空之后的又一有效的对地观测技术体系,且正在不断发展壮大、完善。但是现阶段针对LiDAR、SAR 等新型传感器以及无人机系统的检测、检校与标定技术尚属空白,在一定程度上限制了新型技术装备的发展。另外,面向人工智能、大数据等技术背景,无人机测绘遥感系统在系统检测、实时测绘、大数据精准解译等方面仍显不足,在飞行控制智能化、测绘遥感作业智能化和实时/实景无人机遥感技术应用模式创新等方面仍然有待突破。面向中国不断发展的市场需求,轻小型无人机遥感技术应在自然资源、应急管理、公共安全等方面发挥更加前沿、更加重要的作用,进一步推动对地观测和大众精准感知的产业变革,推动中国遥感技术走向世界领先水平,形成价值超过千亿美元的新兴产业。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















