软件

产品


摘要:
针对水稻穗肥撒施效率和机械化程度低的问题,为提高无人机撒肥均匀性,基于多旋翼无人机平台设计了一种水稻撒肥系统,确定了离心盘、流量调节装置等主要结构参数,同时应用EDEM软件仿真分析了离心盘转速、落入位置角、肥料流量、无人机飞行速度和飞行姿态对肥料分布的影响。
试验表明:肥料分布呈同心圆时,撒肥有利于幅宽边界确定;幅宽随着离心盘转速的增加而增大,肥料分布峰值随流量增大由左侧逐渐变为右侧;撒肥均匀性随流量增加呈先增、后减的趋势,无人机俯仰角与横滚倾斜角对肥料分布均有影响,俯仰造成肥料向中部堆积,横滚使肥料向单侧堆积。
肥料流量、无人机飞行速度和离心盘转速与落入位置角均存在交互作用,对撒肥均匀性有显著影响。当落入位置角为40°、离心盘转速为1 100 r/min、肥料流量为3 460颗/s、飞行速度为5 m/s时,撒肥性能最佳,此时变异系数为8.86%。田间试验结果表明,无人机施肥效率约为人工施肥的12.5倍。本研究为水稻穗肥的机械化施用提供了解决方案,可为水稻穗肥的无人机撒肥系统设计提供参考。
关键词: 水稻;穗肥;撒肥系统;多旋翼无人机;离散元法; 均匀性
按照水稻的营养需肥时间,施肥可分为基肥、蘖肥与穗肥3个阶段,其中穗肥的肥料利用率最高,穗肥的施用能够有效提高水稻产量。在施用水稻穗肥时,水稻生长已经进入中后期,植株较为茂盛、水田地表软塌,特别在四川省等丘陵地区,复杂的田间环境限制了地面施肥机械的使用。因此,水稻施穗肥大多采用人工,这不仅占用了大量农业劳动力,且工作效率低。人工撒肥时易撒施不均,化肥易过度使用,造成环境污染和土壤板结,降低了土壤质量。机械化施肥能够精准控制肥料用量,从而提高施肥效率与施肥质量。
近年来,我国学者对稻田追肥机械进行了大量研究。此类追肥机械大多采用地面机械搭载,主要以拖拉机与高地隙四轮机械为机载平台,在水田中进行施肥作业(或转弯、过埂、爬坡等)。但在水稻生长中后期,追肥机械存在适应性差、操作强度大、对水稻碾压严重等问题,且不适应地形地貌复杂的丘陵地区作业。
多旋翼无人机具有自主飞行功能,能够紧贴作物低空飞行,具有地面机器无法比拟的高通过性和稳定性;无人机体型小,操控灵活,可以实现航迹规划和自动导航飞行,可在地面机械难以进入的场所进行高效作业。因此,无人机为水稻穗肥的撒肥提供了良好的机载平台,能够有效规避水稻特殊的生长环境对施肥机械的限制。随着无人机技术的发展,撒播技术已应用于无人机。此类撒播装置主要用于撒播种子,因其排种量小、排速较低,故无法满足水稻施肥要求。贾瑞昌等设计一种基于无人机的颗粒抛撒装置,该装置由螺旋式给料器调节流量,通过两个抛撒叶片抛撒肥料。包胜军设计的飞行撒播装置利用闸门转动控制出料口,调节播量、离心盘转动,从而实现肥料撒播。对于此类离心式撒播装置,肥料落入圆盘位置无法改变,故难以通过改变肥料落入圆盘的位置来进一步提升均匀性,变异系数普遍为14%~27%。并且还缺乏对撒播装置关键结构的研究分析,无法明确其结构与工作参数对无人机撒肥的适应情况。因此针对上述问题,本文以多旋翼无人机为机载平台,设计水稻无人机撒肥系统。通过分析颗粒化肥的物理特性,确定流量控制开关、离心盘等结构参数,并试验研究流量、转速、落入位置角对均匀性的影响,通过调整落入位置角与圆盘转速提高均匀性,通过调节开关扇叶角度控制流量,以期满足无人机不同飞行高度与速度施肥需求和提高施肥均匀性。
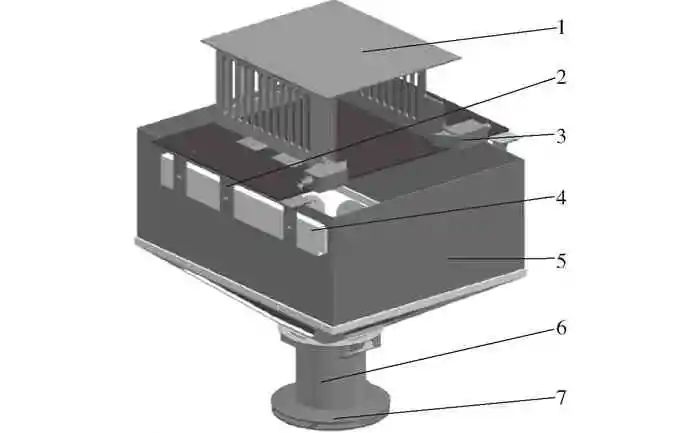
设计的水稻无人机撒肥系统如图1所示,主要由无人机机体、动力系统、飞行控制系统、撒肥控制系统和撒肥装置等组成,撒肥装置通过承重滑轨与无人机机体脚架连接。
图1 水稻无人机撒肥系统实物图
1.控制系统 2.无人机机体 3.电池舱 4.飞行动力系统 5.撤肥装置
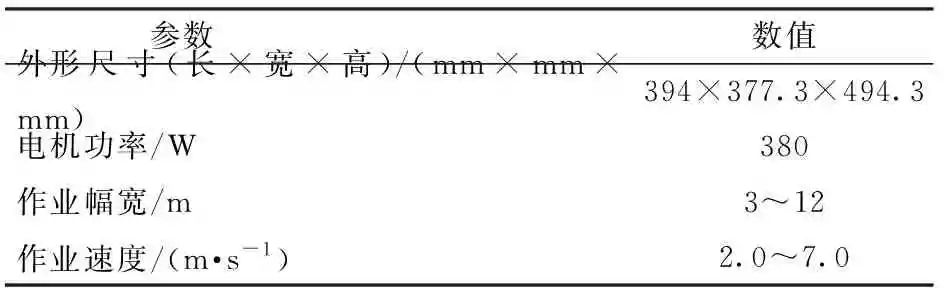
为满足无人机载荷及安装尺寸需要,脚架安装孔距340 mm,设计肥料舱容积为18 L,主要技术参数如表1所示。撒肥装置包括电池舱、固定架、承重滑轨、流量调节装置、离心盘、电池固定卡扣和肥箱等,如图2所示。固定架安装于无人机脚架两侧,电池舱与滑轨安装于固定架上,肥箱通过滑轨与固定架连接,能够抽拉实现肥料的快速填装。安装于肥箱底部的流量调节装置与离心盘是实现均匀抛撒的重要装置,离心盘由电子调速器控制的无刷电机驱动;舵机通过摇臂与拉杆带动流量控制扇叶。电子调速器、舵机与撒肥控制系统连接;通过PWM信号线与飞行控制系统通信,从而控制撒肥装置工作。
表1 无人机撒肥装置主要技术参数
图2 无人机撒肥装置结构示意图
1.电池舱 2.固定架 3.电池固定卡扣 4.承重滑轨 5.肥箱 6.流量调节装置 7.离心盘
撒肥装置工作时,首先拉出肥箱填装肥料,接通电源将无人机飞至作业区域拨动撒播装置控制开关至工作状态。舵机带动流量控制扇叶向下摆动,肥箱与离心盘之间的通道打开,肥料颗粒在重力和机械振动的作用下,从肥箱通过流量控制开关进入高速旋转的离心盘,在离心力的作用下颗粒肥料均匀抛撒。
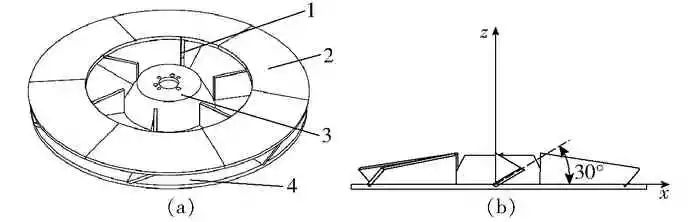
离心盘由水平底座、电机转子安装座、上挡板和拨肥片组成,拨肥片位于上挡板和水平底座之间,如图3a所示。离心盘内部设有电机安装座,为凸起的锥形台,高度10 mm,能够防止肥料颗粒在离心盘中部堆积堵塞,使肥料颗粒均匀落入离心盘中。离心盘结构对肥料颗粒运动轨迹至关重要[17-18],肥料颗粒的运动轨迹还受到无人机下旋气流的影响。杨风波等[20]、COOL等[21]研究发现肥料颗粒运动方向与气流运动方向夹角越小,气流对肥料颗粒运动轨迹影响越小;气流对速度越快、密度越大的肥料颗粒影响越小。无人机下旋气流主要位于旋翼下方,离心盘位于六旋翼无人机中心,肥料颗粒离开离心盘后将会受到下旋气流的影响。
图3 离心盘结构示意图
1.拨肥片 2.上挡板 3.电机转子安装座 4.水平底座
根据无人机施肥作业要求,离心盘结构参数计算式为
(1)
式中 D——离心盘直径,mm
A——抛撒幅宽,mm
ω——角速度,rad/s
ka——颗粒数量,取2 000~7 000粒
Q——流量,粒/s h——飞行高度,m
v——颗粒运动速度,m/s
dm——电机安装座直径,mm
df——颗粒直径,mm
d——入料口直径,mm
l——拨肥片长度,mm
hm——离心盘高度,mm
当作业幅宽、飞行高度和离心盘转速分别为4~6 m、1.5~3 m和1 000 r/min时,离心盘直径D为132~157 mm,取140 mm;高hm为20 mm。电机安装座为锥形台结构,根据电机安装座底部直径为60 mm,得拨肥片长度为40 mm;锥形台结构顶部直径,即电机安装直径dm为35 mm。
为减小肥料颗粒运动方向与气流方向的夹角,使肥料颗粒离开离心盘时,运动方向具有向下的倾角,将拨肥片设计为90°逐渐偏转为30°的直纹曲面(图3b),用于引导肥料颗粒的运动方向,偏转方向与离心盘旋转方向(逆时针)一致。根据高hm和偏向角,拨肥片宽度为11~16 mm。
前人发现,拨肥片数量为4~6个,拨肥片较短时对离心盘的高转速适应性较好,均匀性较优[22-23],本研究取拨肥片数量为6个,离心盘能够在高转速条件下保持较好的撒肥均匀性。离心盘工作时,受上挡板的限制,肥料颗粒只能从狭长的出料口撒出,使肥料颗粒撒出后集中在圆形边缘,肥料分布以离心盘为圆心形成一个同心圆。无人机撒肥作业时,同心圆进行叠加形成撒肥带。该同心圆撒肥模式,幅宽即为同心圆外圆直径,可避免因幅宽叠加不准确导致的肥料分布不均匀。
流量调节装置主要由下料筒、电机定子安装座、固定面、舵机安装槽、舵机、开关扇叶和拉杆组成。流量调节装置下料筒直径为89.5 mm,通过调节流量改变肥料颗粒落入离心盘的位置。通过控制舵机带动流量控制扇叶摆动,从而改变肥料下落口的面积,实现流量控制。
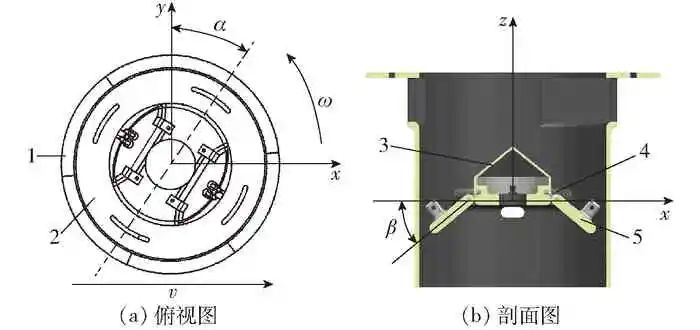
电机定子安装座宽度为35 mm,安装座位于下料筒中部,将落肥口从中间一分为二;固定面为圆形,有环形旋转安装孔位,电机定子安装座能围绕z轴在15°~75°间旋转,使电机定子安装座中轴线与无人机航线的垂直方向的y轴形成一定夹角,由于电机定子安装座的遮挡,当流量调节装置旋转时,落肥口的位置也会发生改变,从而改变肥料颗粒落入离心盘的位置。落入位置角α如图4a所示,即电机定子安装座对称轴与y轴的夹角。落入位置角是通过固定面上的环形安装孔,在15°~75°范围内进行旋转调整。流量调节装置安装完毕后,落入位置角与机身保持固定的角度,当无人机偏航角改变时航线也会发生改变,落入位置角随即发生改变,从而影响撒肥的均匀性。无人机作业时,需保持偏航角稳定,在同一偏航角下,前后移动、左右平移。
图4 流量调节装置结构示意图
1.离心盘 2.固定面 3.导流盖 4.电机定子安装座 5.流量控制扇叶
抛撒结构为肥料抛撒的关键部件,其作业性能直接影响作业效率与施肥效果。使用EDEM建立仿真模型,能够较为快速准确地分析各因素对均匀性的影响,优化出抛撒结构的最优参数。
使用Unigraphics NX 10.0软件建立仿真模型,导入EDEM软件。根据仿真结果,在距离离心盘下方1 m处建立肥料颗粒收集面,为确保所有肥料颗粒能够被收集,确定收集区域为15 m×40 m,为避免肥料颗粒弹跳影响试验结果,将肥料颗粒与收集面的静摩擦因数和动摩擦因数设定为1。
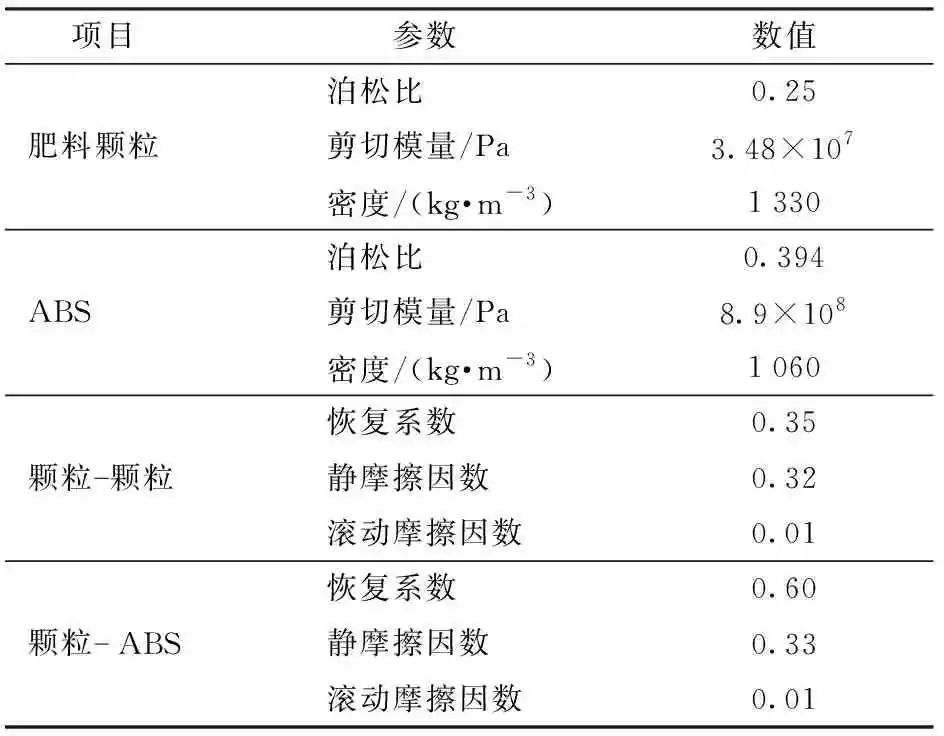
试验材料选用颗粒尿素,使用外径千分尺测定100粒尿素颗粒直径,平均值为3.341 mm。材料之间均选择Hertz-Mindlin无滑动接触模型。各材料及材料之间的仿真参数如表2所示。
表2 仿真参数
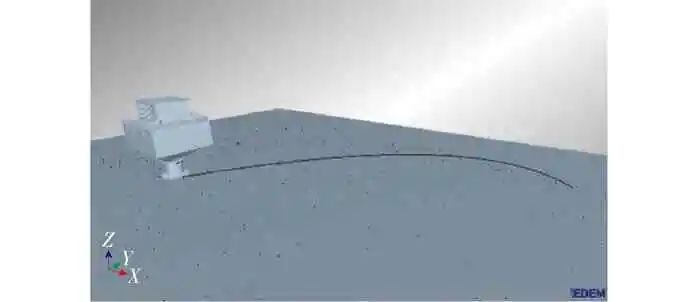
在撒肥过程中,肥料颗粒受力的大小、速度、位移的变化对肥料颗粒的最终分布状态有直接影响。如图5所示,随机选取具有代表性的颗粒进行标记,将颗粒的运动数据导出,分别对肥料颗粒的速度、受力及位移变化规律进行分析。
图5 颗粒运动轨迹
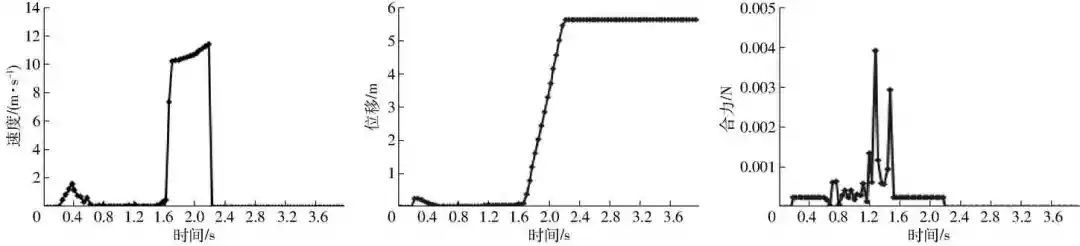
由图6可知,在0.16 s之前,由于肥料颗粒尚未生成,合力、位移、速度为0。0.2 s时肥料颗粒在距离坐标原点0.272 m处生成,受到重力做自由落体运动,向位于坐标原点的流量调节装置移动,合力约为2.56×10-4 N,速度受合力影响逐渐增加。在0.36 s时速度达到第一峰值(1.648 m/s)后,由于肥料落到下料筒的肥料堆积位置,速度迅速降低,位移变化减小。在0.65 s后,此时颗粒较多,受到肥料颗粒间的挤压力、颗粒与撒肥装置间的碰撞影响,受力情况波动较大。在1.21 s时落入离心盘,此时受离心力的影响,合力较大,峰值达到0.003 9 N。肥料颗粒在1.54 s受离心盘作用速度突然增大,离开离心盘后位移逐渐增大,此时颗粒受到重力做加速平抛运动,速度依然逐渐增加。在2.18 s时与地面接触,运动停止。
图6 肥料颗粒运动特性曲线
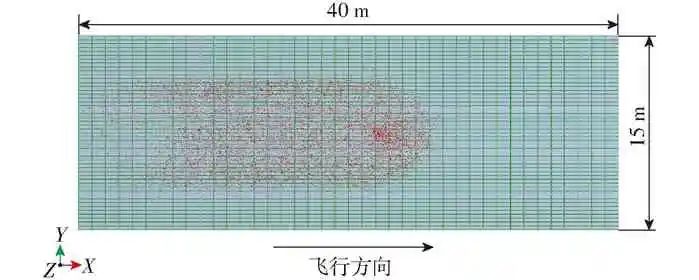
根据圆盘式撒肥机的试验方法[21,24],在EDEM 后处理Selection中沿Z轴方向,距离离心盘下方1 m处设置Grid Bin Group计数网格,每个网格尺寸300 mm×400 mm,15 m×40 m的收集矩形区域内50行、100列共5 000个计算网格,如图7所示。将落入每列网格中肥料颗粒数量进行叠加,形成1×50的单行肥料收集矩阵,以横向单行肥料颗粒数量及其横向变异系数作为试验的均匀性指标。
图7 EDEM 收集网格
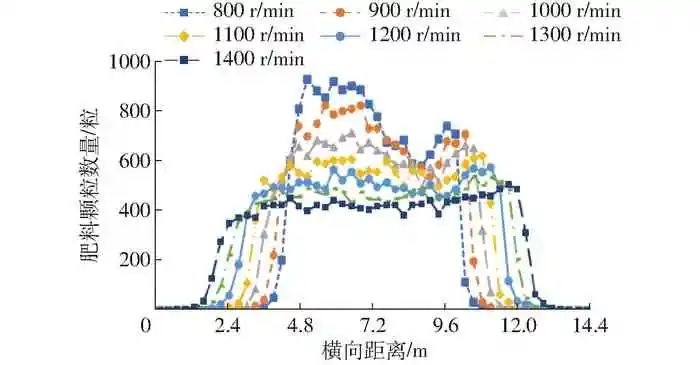
3.4.1 离心盘转速对肥料分布的影响
在飞行高度为1.5 m、飞行速度为5 m/s、流量为3 500粒/s、落入位置角为40°时,离心盘转速在800~1 400 r/min、增量为100 r/min下进行仿真试验,试验结果如图8所示。随着离心盘转速增加幅宽逐渐增大,变异系数呈现出先减小后增大的趋势,肥料分布峰值由左侧逐渐变为右侧;在高转速(1 200~1 400 r/min)条件下均匀性优于低转速(800~1 000 r/min)。在转速1 100~1 300 r/min时,变异系数在7%~9%之间,肥料分布较为均匀。
图8 不同离心盘转速的肥料分布曲线
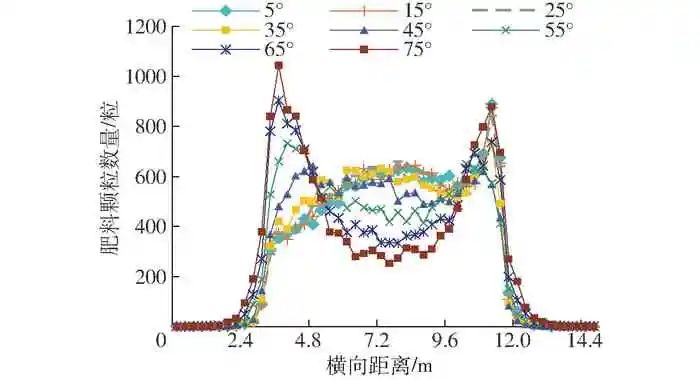
3.4.2 落入位置角对均匀性的影响
在飞行高度为1.5 m、飞行速度为5 m/s、流量为3 500粒/s、离心盘转速为1 100 r/min时,落入位置角在5°~75°、增量为10°下进行仿真试验。随着落入位置角的增大,均匀性呈现出先减小后增大的趋势(图9)。落入位置角对横向肥料分布密度影响不明显,但是随落入位置角的增加,肥料分布由中心聚集逐渐向两侧聚集。在35°~55°时肥料分布较为均匀,变异系数在8%~15%之间。
图9 不同落入位置角的肥料分布曲线
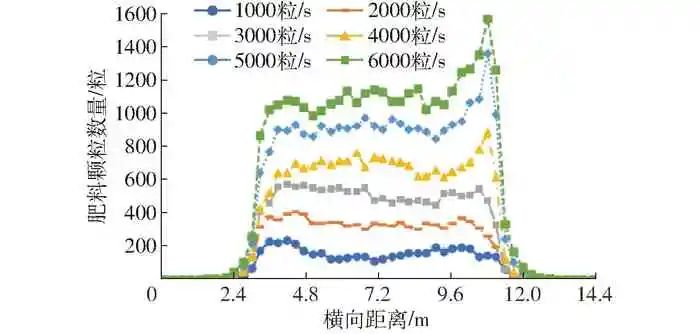
3.4.3 流量对肥料分布的影响
在飞行高度为1.5 m、飞行速度为5 m/s、圆盘转速为1 100 r/min、落入位置角为40°时,流量在1 000~6 000粒/s、增量为1 000粒/s下进行仿真试验。结果表明,随着流量增大,肥料分布曲线出现明显波动,变异系数呈现出先减小后增大的趋势;在横向幅宽上,由于恒定转速排出的肥料颗粒数量是固定的,随着流量增大,受到落入位置角与离心盘转速的影响,肥料颗粒在离心盘内单侧堆积,肥料分布峰值由左侧逐渐变为右侧,在3 000粒/s时肥料分布较为均匀,变异系数较小(图10)。
图10 不同流量的肥料分布曲线
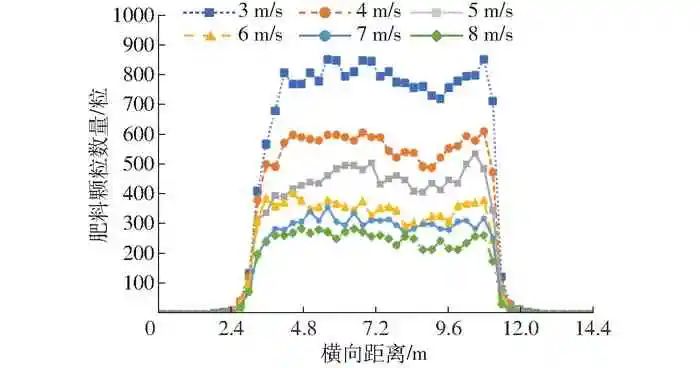
3.4.4 无人机飞行速度对肥料分布的影响
在飞行高度为1.5 m、落入位置角为40°、流量为3 500粒/s、圆盘转速为1 100 r/min时,飞行速度在3~8 m/s、增量为1 m/s下进行仿真试验,试验结果如图11所示。飞行速度的增加对均匀性影响不明显;随着肥料分布密度逐渐降低,肥料分布曲线波动逐渐变小。
图11 不同飞行速度的肥料分布曲线
单因素试验结果表明,离心盘转速、落入位置角、流量都会影响肥料分布。离心盘结构形成的同心圆式撒肥与传统撒肥幅宽界定相比[17,22],撒肥幅宽边界较为明显,作业规划航线时有利于幅宽快速确定。在圆盘转速、落入位置角、流量较大或较小时,肥料分布呈现出单侧或两侧颗粒密度大、中间少的情况。飞行速度仅对肥料分布密度有影响,因此开展正交回归旋转试验进行参数优化分析。
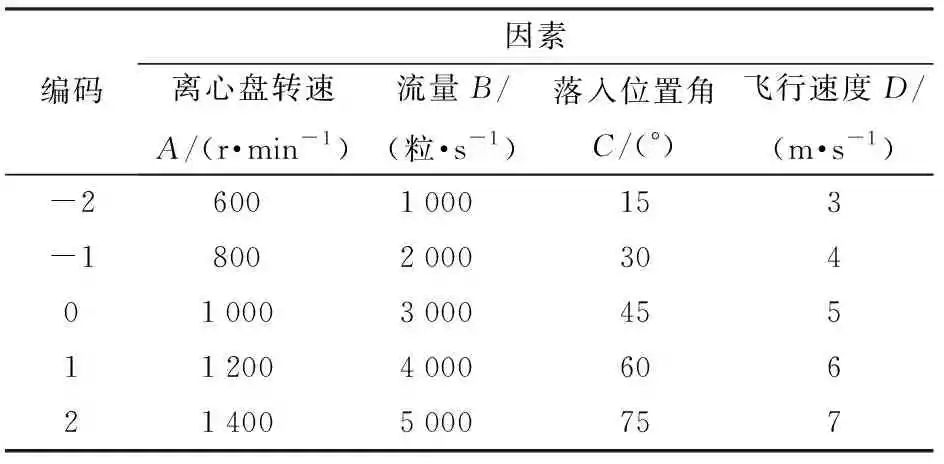
采用四因素五水平的二次正交回归旋转组合试验设计,以与飞行方向一致的横向变异系数为衡量指标。试验因素编码见表3,试验设计及结果见表4。
表3 试验因素编码
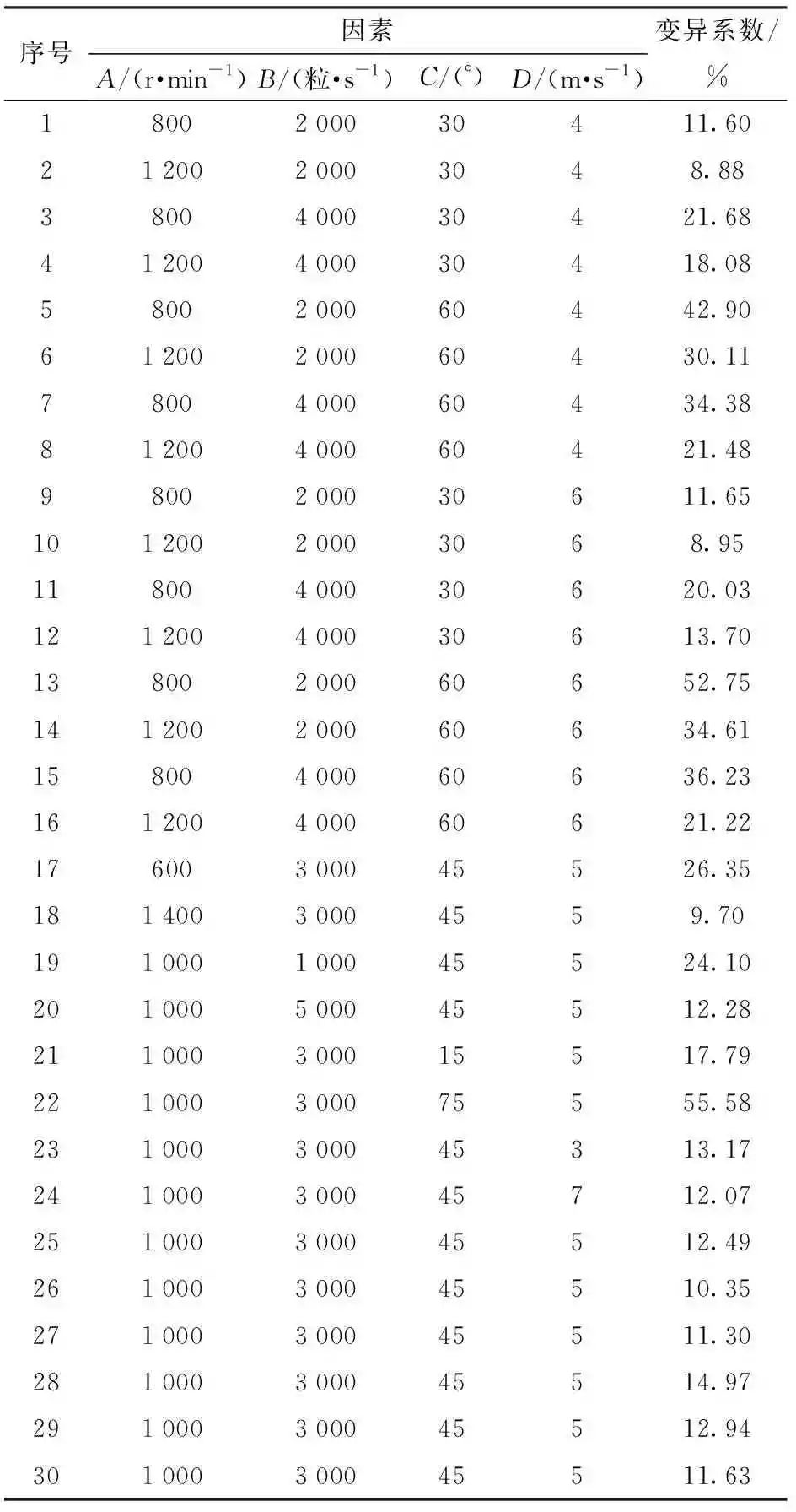
表4 二次正交回归旋转组合试验方案与结果
Tab.4 Test plan and results of quadratic regression rotatable orthogonal design experiment
3.5.1 数据分析
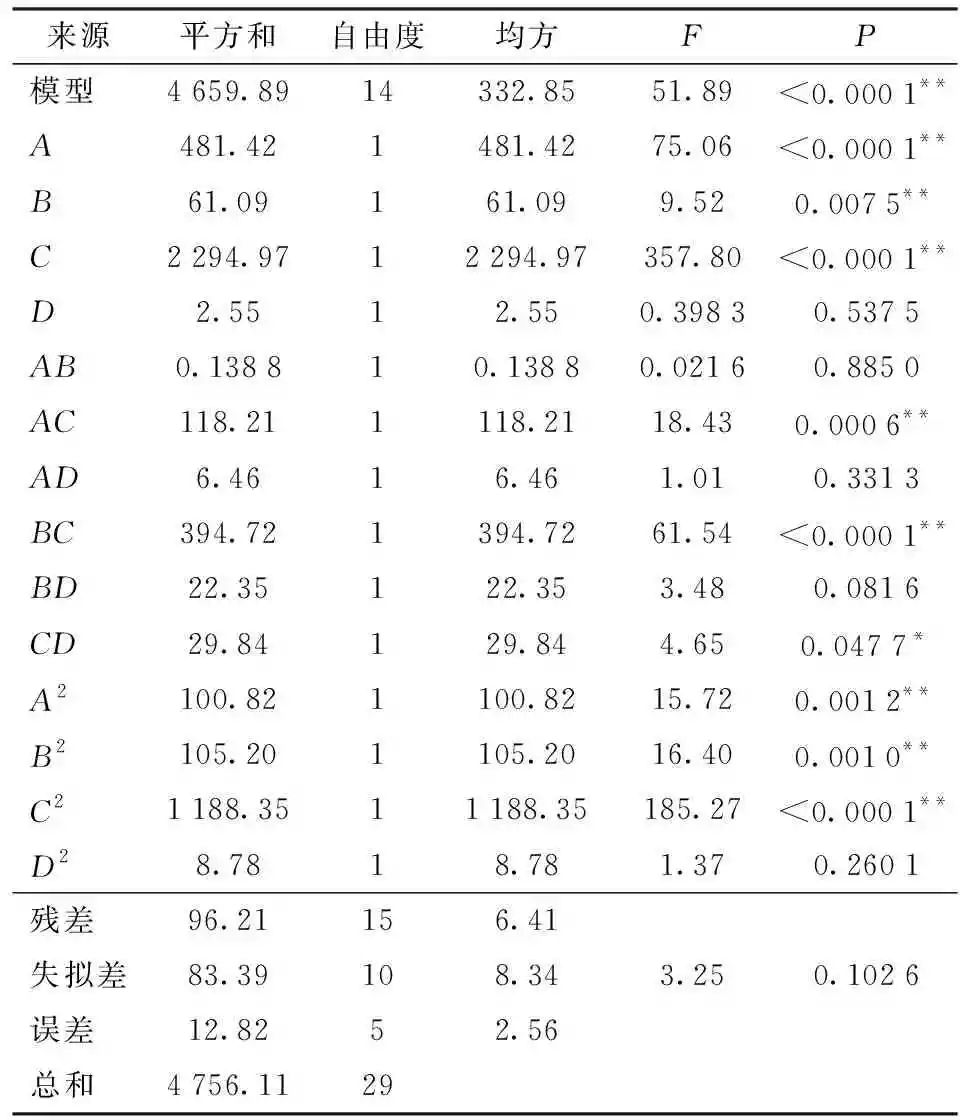
应用Design-Expert 11软件对试验结果进行多元回归拟合分析,得到方差分析如表5所示,其中二次回归模型呈极显著(P<0.000 1),方差分析结果表明,影响均匀性显著性的因素由大到小依次为C、C2、A、BC、AC、B2、A2、B、CD、BD、D2、AD、D、AB,其中除交互项CD对变异系数影响显著(0.01<P<0.05)外,C、C2、A、BC、AC、A2、B2、B均对变异系数的影响呈极显著性(P≤0.01)。4个因素中对变异系数影响由大到小依次为落入位置角C、离心盘转速A、流量B,飞行速度D对变异系数影响不显著。
表5 变异系数方差分析
注:**表示极显著(P<0.01);*表示显著(P<0.05)。
根据系数间不存在线性相关性,经逐步回归法剔除不显著因素,得到各因素与变异系数回归响应方程为
CV=47.312 5-6.019 4×10-2A+7.93×10-3B-
0.536 75C-9.06×10-4AC-3.31×10-4BC+
9.104 2×10-2CD+4.8×10-5A2+1.958 44×10-6B2+0.292 54C2
(2)
3.5.2 响应面分析
根据方差分析结果,AC、BC、CD对变异系数影响显著,因此分析这3组对变异系数影响显著的交互作用。
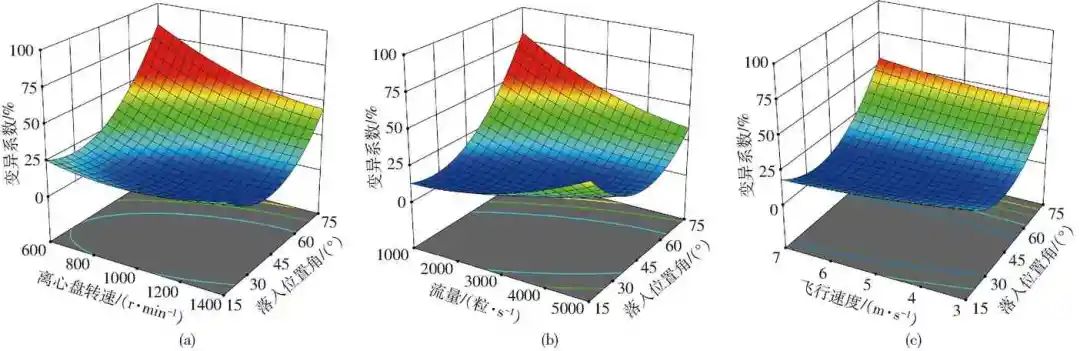
在流量为3 500粒/s、飞行速度为5 m/s时,离心盘转速与落入位置角交互作用的响应曲面如图12a所示。当落入位置角不变时,变异系数随着离心盘转速的增加呈现先减小后增大的趋势;当离心盘转速不变时,变异系数随着落入位置角的增加也呈现先减小后增大的趋势。在离心盘转速为1 000~1 350 r/min、落入位置角为35°~50°时变异系数较小。肥料颗粒离开离心盘时的状态由离心盘转速与落入位置角共同决定,从而影响了均匀性,落入位置角与离心盘转速是影响均匀性最为关键的两个因素。
图12 因素交互作用的变异系数响应曲面
在离心盘转速为1 200 r/min、飞行速度为5 m/s时,流量与落入位置角交互作用的响应曲面如图12b所示。当落入位置角不变时,变异系数随着流量的增加呈现先减小后增大的趋势;当流量不变时,变异系数随着落入位置角的增加也呈现先减小后增大的趋势。在落入位置角为33°~51°、流量为2 000~4 000粒/s时变异系数较小。为满足目标施肥量,流量需要根据幅宽的变化随时调整,从图12b中可以看出,落入位置角为42°左右时,对流量变化适应性最好,有利于流量的调整。
在离心盘转速为1 200 r/min、流量为3 500粒/s时,飞行速度与落入位置角交互作用的响应曲面如图12c所示,当落入位置角不变时,变异系数随着飞行速度的增加呈现先减小后增大的趋势;当飞行速度不变时,变异系数随着落入位置角的增加呈现先减小后增大的趋势。在飞行速度为3~6.5 m/s、落入位置角为35°~45°时变异系数较小。由于飞行速度对变异系数影响不显著,因此落入位置角是这一组交互作用中影响变异系数的重要因素。
3.5.3 参数优化与验证试验
为得到最佳撒肥性能,寻找最优的工作参数,以表3中各因素范围为约束条件,以变异系数回归模型为目标函数,求解其最小值,得最优参数组合为圆盘转速1 105.0 r/min(取1 100 r/min)、流量3 459.38颗/s(取3 460颗/s)、落入位置角40.5°(取40°)、飞行速度5.03 m/s(取5 m/s),此时变异系数为8.86%。将优化参数进行仿真验证,得横向变异系数为8.23%,与优化结果基本吻合。
使用与仿真条件一致的颗粒尿素,试验地点为四川农业大学崇州基地。根据ASAE试验标准[23,25],在与仿真一致的15 m×40 m收集域内摆放14×40个盒子,每个盒子面积与计算网格面积相同(300 mm×400 mm)。为使肥料不从纸盒中弹出,其底部铺5 000 g的细沙(图13)。在最优参数组合下进行3次重复试验,变异系数分别为9.86%、9.02%、10.34%,均值为9.74%,与优化结果基本一致,表明仿真模型的参数可靠。
图13 验证试验
在无人机工作过程中,接收控制指令后,无人机通过改变飞行姿态,即俯仰倾斜与横滚倾斜,实现运动方向的改变,外界环境也会对无人机飞行姿态造成影响。前人研究发现,撒肥装置工作姿态会对肥料分布造成影响[26]。由于多旋翼无人机特殊的控制特性,飞行姿态变化较为频繁,研究飞行姿态可提高无人机施肥质量。本文依据无人机常规工作状态,对飞行姿态的变化范围进行了仿真。研究俯仰姿态与横滚姿态不同倾斜角下肥料分布规律。
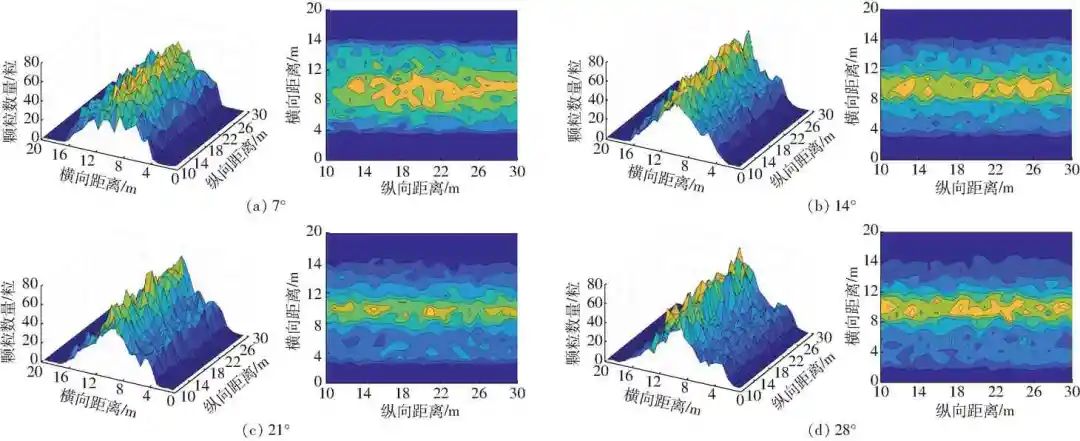
俯仰姿态对肥料分布影响如图14所示。当无人机向前飞行、迎风或俯仰修正时,机身发生俯仰倾斜,离心盘与无人机固定连接保持同一姿态前后俯仰倾斜。在最优工作参数下,横滚倾斜角为0°,在俯仰倾斜角为7°~28°、增量为7°下,进行仿真试验。结果表明,肥料颗粒受姿态改变的影响,在幅宽内呈现出中部分布密度高、两侧分布密度低的现象。随着俯仰倾斜角增加,均匀性逐渐变差,肥料颗粒集中于中部,两侧分布密度逐渐降低;高密度区域逐渐变窄,低密度区域逐渐变宽。幅宽与肥料分布峰值,随着俯仰倾斜角的增加而增加。
图14 不同俯仰倾斜角的肥料分布图
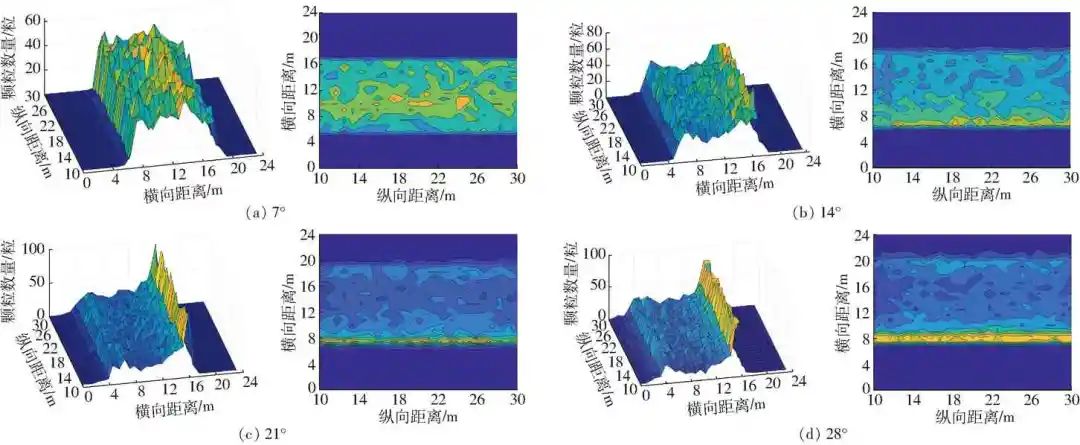
横滚姿态对肥料分布的影响如图15所示。当无人机横向飞行、侧风或航线修正时,机身发生横滚倾斜,离心盘与无人机固定连接保持同一姿态左右横滚倾斜。在最优工作参数下,俯仰倾斜角为0°,在横滚倾斜角为7°~28°、增量为7°条件下开展仿真试验。结果表明,无人机横滚倾斜角在7°以内时,对肥料分布影响较小。当倾斜角高于14°时随着倾斜角的增加,肥料颗粒集中于无人机倾斜一侧,幅宽逐渐增大,肥料分布峰值增高,均匀性逐渐变差,肥料整体分布逐渐向无人机倾斜一侧移动。
图15 不同横滚倾斜角的肥料分布图
飞行姿态对肥料分布影响的仿真试验结果表明,俯仰与横滚倾斜角对肥料分布都有影响,横滚倾斜角对肥料分布影响大于俯仰倾斜角。俯仰倾斜会使肥料颗粒集中分布于中部,颗粒数量由中部向两侧递减,会减小有效幅宽,可利用传统幅宽叠加方式解决。横滚倾斜造成的肥料分布不均匀,无法通过操作手段解决,在作业过程中,应避免横向飞行与大风天气作业;横滚倾斜角较小时对肥料分布影响不大,因此常规作业航线修正对无人机撒肥质量影响不大。
为验证无人机施肥是否影响水稻产量,进行了与传统施肥对比的小区试验,小区面积为324 m2,采用人工施肥与无人机施肥两种施肥方式进行对比试验(图16)。供试品种为宜香优2115。人工施肥全生育期均为人工,无人机施肥仅穗肥使用无人机。人工施肥与无人机施肥的产量分别为9 007.03、9 109.76 kg/hm2。说明无人机施肥可以稳产增产,满足水稻施肥要求。
图16 小区试验
为进一步考察无人机施肥在大面积应用时的可靠性与稳定性,进行了大田试验(图17)。试验点为四川省大邑县,供试品种为天优华占、晶两优534、C两优华占、蓉7优2115与德优4727共5个品种。其中基蘖肥采用地面机械与人工撒施;穗肥(即促花肥与保花肥)均采用无人机施肥,施肥面积共计102 hm2,平均产量为11 769.54 kg/hm2,达到了高产水平。
图17 大田试验
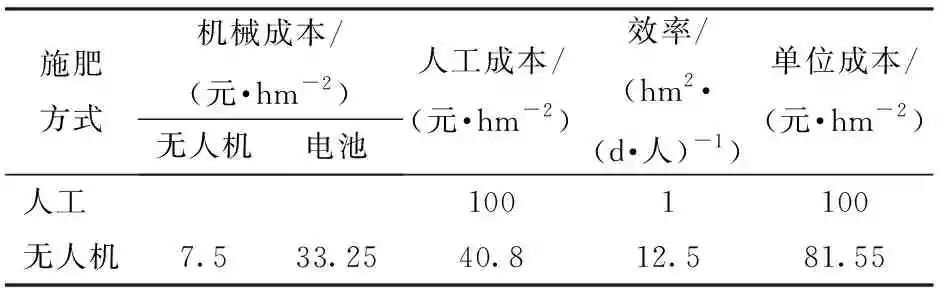
无人机所需成本:无人机折旧为7.5元/hm2;动力电池为:22 000 mA智能电池,功率为976.8 W,单价:3 200元/组,200~300冲放次数,无人机单次载荷为12 kg的效率最高,约每2 min为一架次,每组电池共计撒施3架次;每天工作10 h,飞手工资以40.8元/hm2计算。人工成本按照四川省大邑县旭成农作物种植合作社人均工资每人100元/天计算。
无人机施肥、人工施肥两种施肥方式作业成本见表6。虽然无人机施肥成本相对于人工施肥成本降低程度较少,但是无人机施肥工作效率约为人工施肥的12.5倍。人工作业效率低,在大面积作业时可能导致耽误农时。降低无人机施肥成本的主要因素是载荷与飞行时间的矛盾,以及电池成本高等问题。
表6 无人机施肥与人工施肥成本对比
1)根据水稻穗肥撒施需求及无人机飞行特性设计了一种离心式无人机撒肥系统,确定了离心盘与流量调节装置等主要结构参数。对离心盘等结构进行分析,确定了利用上下挡板形成的闭合式离心盘结构参数。结合单因素仿真试验,分析了圆盘转速、落入位置角、流量、无人机飞行速度对肥料分布的影响。
2)多元回归正交旋转试验表明,落入位置角与离心盘转速、落入位置角与流量、落入位置角与飞行速度间的交互作用对均匀性影响显著,各因素对均匀性的影响顺序由大到小为:落入位置角、离心盘转速、流量、飞行速度。无人机俯仰倾斜角与横滚倾斜角对肥料分布均有影响,其中横滚倾斜角影响较大,会造成肥料向单侧堆积;俯仰倾斜角影响相对较小,会造成肥料向中部堆积。
3)优化求解得到的工作参数为:落入位置角40°、离心盘转速1 100 r/min、流量3 460颗/s、飞行速度5 m/s,此时均匀性变异系数为8.86%,与仿真验证(8.23%)及试验验证(9.74%)结果基本一致。无人机施肥工作效率约为人工施肥的12.5倍,作业成本降低了18.45元/hm2,能够满足田间撒肥作业要求。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020