















































软件

产品


前言:Comsol是优秀的多物理场仿真软件,用来模拟单个物理场、以及耦合多个物理场。用户可以在Comsol中任意组合使用物理场模块,无论模拟哪个工程领域的问题或是哪种特定的物理现象,都可以在同一个软件界面中,使用相似的操作流程进行分析。Comsol主要有结构力学、声学、化工、流体、传热、电磁模块等,本次仿真主要采用其中的多体动力学模块进行刚柔耦合分析。多体动力学模块是进行多物理场耦合的一个关键基础模块,用户可以在此基础上耦合例如声学、疲劳、传热等模块。
第一部分:Comsol多体动力学刚柔耦合仿真介绍
在通常情况下,多体动力学仿真中的大部分部件都是刚性的,由此只需要关注刚体的动力学特征,然而,在某些特殊情况下,我们需要观察其中某个部件的变形、应力、应变情况,所以我们需要选择性的将刚体和柔性体指派到不同的部件。关于多体动力学的刚柔耦合分析,很多有限元软件都可以实现,如Hyperworks、Adams、ANSYS等,但是这些有限元软件在进行模型建模时,有些缺少必要的运动副,有些需要借助别的软件才可以进行柔性体转化,使用不够便利。而Comsol解决了上述软件的矛盾,可以在自己的界面中独立完成刚柔耦合分析,对于不重点关注的刚体部分,可以将网格粗糙化,对于重点关注的柔性体部分,可以将网格适当加密。
Comsol基础的运动副(关节)包括:
棱柱关节、铰链关节、圆柱关节、螺纹关节、平面关节、球关节、槽关节、约化槽关节、万向接头、距离关节等。
其中关节的功能是:
约束:限制部件件的相对运动
锁定:在关节上锁定特定自由度
弹簧和减震器:给部件的相对运动添加弹簧和减震器
制定运动:以时间函数的形式指定相对运动
提供力和力矩:在边界上施加力和力矩
摩擦:给关节添加摩擦力
在进行关节设置时,我们需要分别指派两个部件,一个为从动件,一个为主动件,并建立关节的中心和指定关节轴(运动法向)
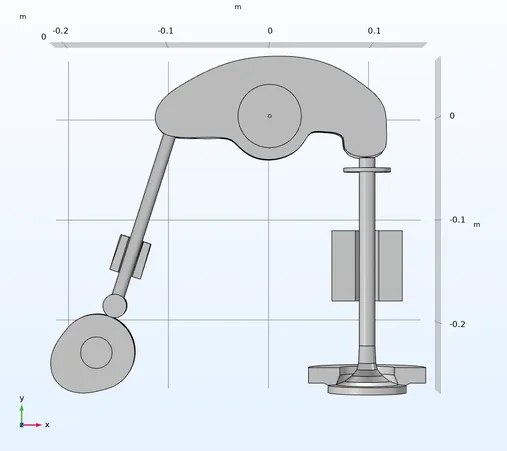
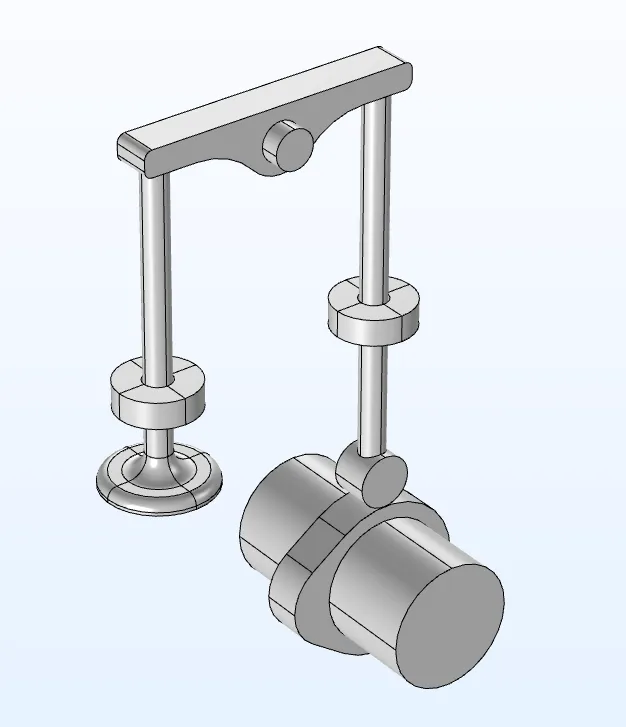
在本次实例中,我们选择凸轮摇臂阀门模型来进行仿真,①首先我们将整个模型的部件全设置为刚体结构进行仿真,②之后将活塞杆变成柔性体进行仿真,以此来发现刚柔耦合操作的不同之处。③最后,提供一个相似的小例子,该例子使用瞬态仿真分析,并伴随着弹簧阻尼的变化,读者可以根据小例子进行部件的柔性化,亲自实践会更明显的体会到刚柔耦合的用法。
第二部分:多体动力学模型—纯刚体域
一、模型向导
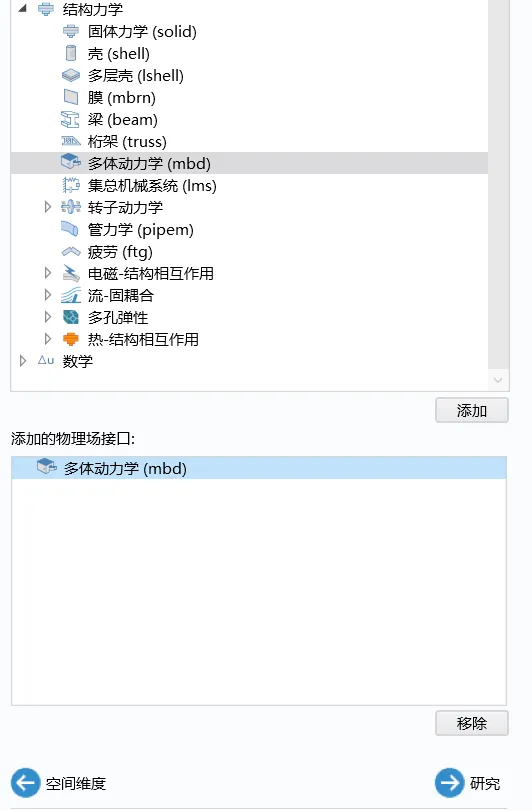
1、打开comsol软件,使用模型向导,选择三维模型>结构力学模块>多体动力学,点击添加,随后点击研究。

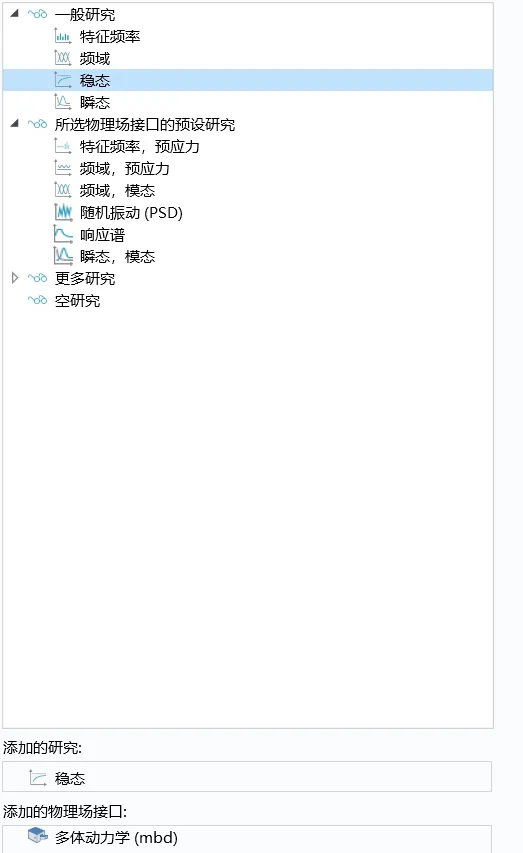
2、在研究中,选择稳态分析,并点击完成。
二、几何处理
1、单位设置。在几何中修改长度单位为m。

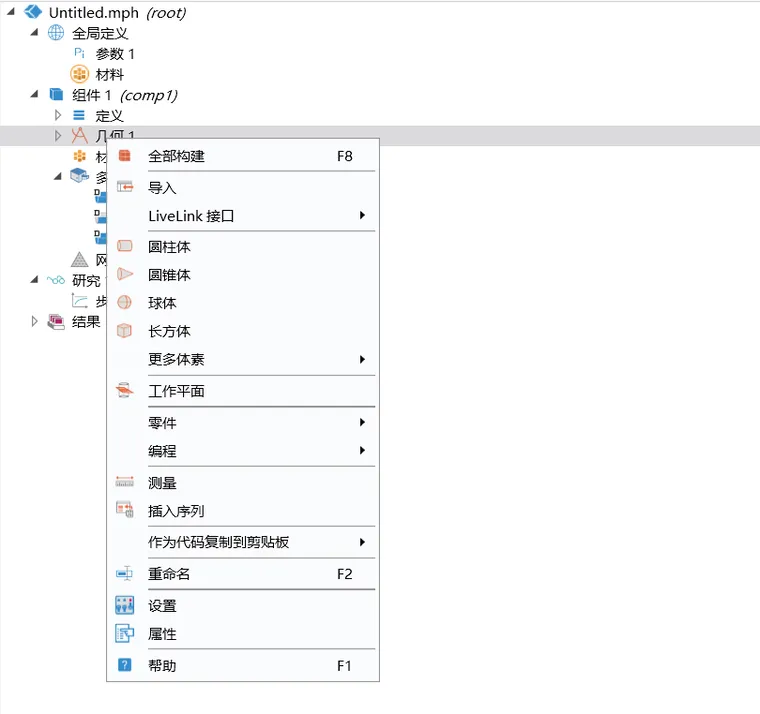
2、几何导入。点击几何右键,并选择导入几何,分别导入文件中的X_T模型,长度单位选择:来自CAD文档,其余均默认。

3、几何清理。
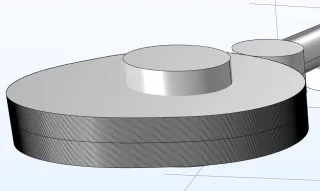
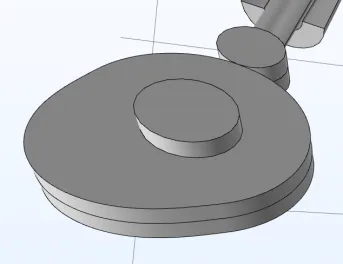
①由于导入的凸轮模型和摇臂模型的边缘处出现密集的线条,在后期画网格时,该处就会形成网格集中,使网格质量较差,所以需要进行表面处理,点击几何>虚拟操作>形成复合面,选中凸轮的所有表面,并构建选定对象,同样的,摇臂模型也需要进行类似处理。


②由于凸轮杆支座为片体结构,所以需要将其生成实体,点击几何>扫掠,分别选择支座的上端面和支座的边缘线,并构建选定对象。


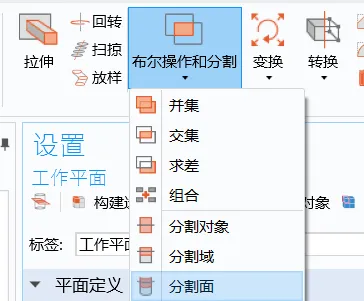
③我们需要在凸轮上选择两个点以进行运动副的搭建,由于凸轮与凸轮连接球的位置没有接触点,故需要将凸轮面新建平面并进行分割。选择工作平面>平面定义类型为法矢,x向量位置为1,指定面上的点,构建平面对象。选择布尔操作和分割>分割面,将凸轮连接球的表面进行分割。


④形成装配>动作:形成装配,取消创建对。
小结:该部分可以根据读者自己的模型进行处理,如果模型几何比较简单或特征明显(网格均匀易收敛),可以直接跳过该步骤。
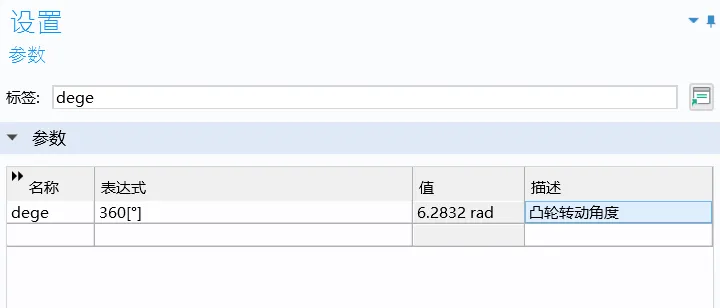
4、创建参数
在主屏幕中点击参数,标签名字为“dege”,参数名称:dege;表达式:360[°]。
三、材料设置
1、在工具栏界面选择材料>添加材料>内置材料,根据模型的实际材料进行选择即可。本次实例都选择为Aluminum

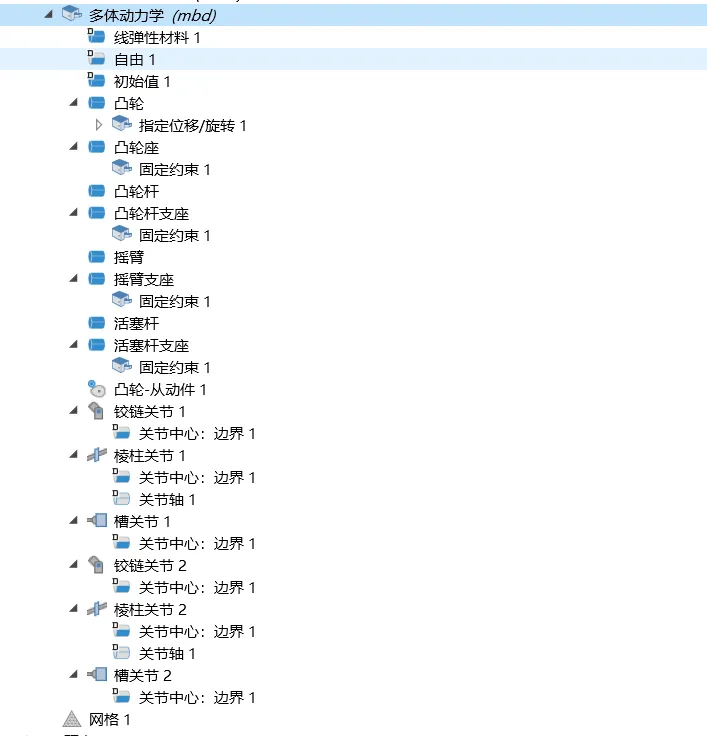
四、多体动力学设置
1、创建刚性域。
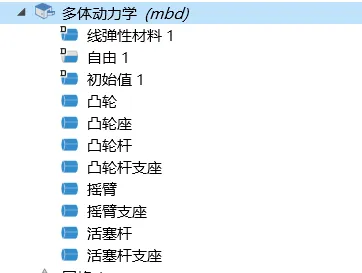
①在第一次仿真时,我们先进行纯刚体仿真,所以需要将所有进行多体动力学仿真的部件均建立刚性域,点击上侧工具栏中的物理场>域>刚性域,在域选择中依次选择各个部件并命名。

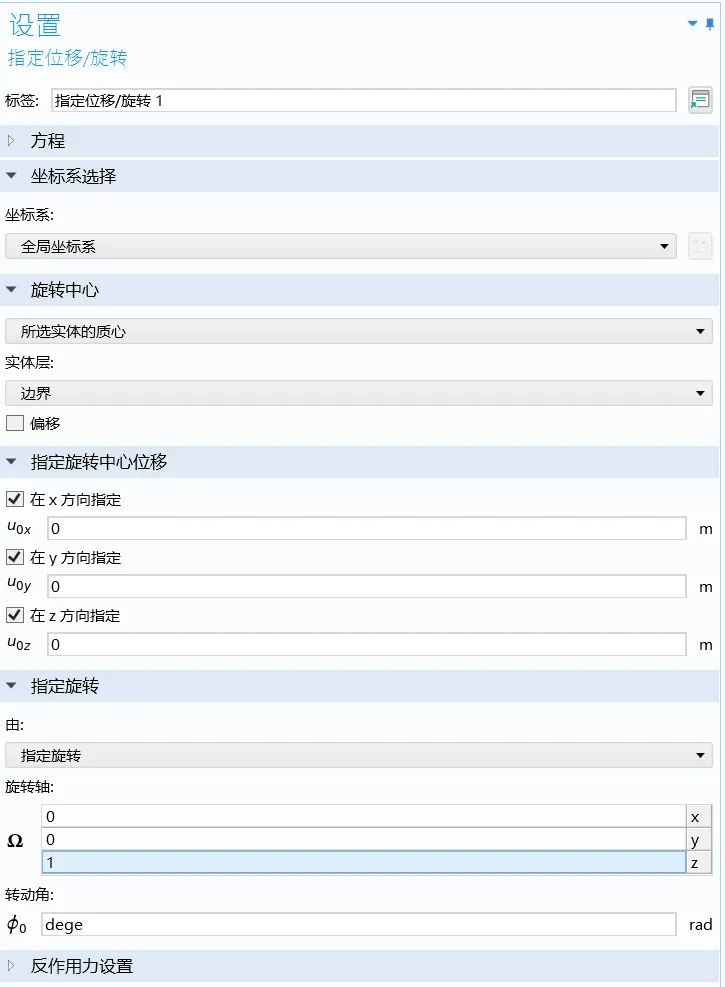
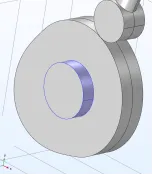
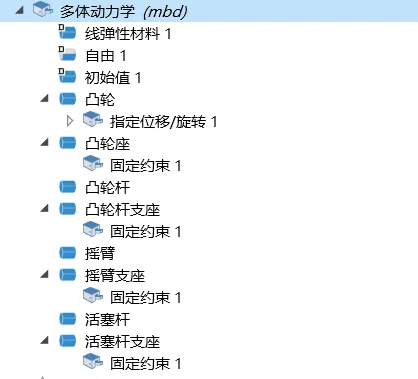
②给特定的刚性域添加约束及驱动。右键“凸轮”选择指定位移/旋转。旋转中心:所选实体的质心;实体层:边界;指定旋转中心位移:均勾选并设置为0;指定旋转轴:0,0,1;转动角:dege。最后打开旋转中心:边界,旋转凸轮中间的滑块边界当做旋转轴。
③右键凸轮连接柱和凸轮连接杆支座、支撑座圆柱,建立固定约束。
2、创建凸轮-从动件
在这一步中,我们主要是在凸轮及其连接杆间建立凸轮运动副模拟凸轮及其从动件的运动。边界选择:选择凸轮的外表面。点选择:选择在前几步中切割画出的凸轮及其连接杆之间的接触点(从动件的点选择需要选择两个及以上的点,如果有接触点,可以直接选择接触点,没有接触点可以选择从动件上的任意两个点,但是要在后面的偏置中输入偏移量,该偏移量的距离为所选点的位置到凸轮外表面的直线距离)

3、创建其它运动副
根据各个部件间的运动关系建立运动副(具体可参考模型文件),在该仿真中一共涉及以下几个运动副,各个运动副可参考模型文件:
铰链关节(Hinge Joint):也被称为旋转副,两个部件之间只有一个旋转自由度。
棱柱关节(Prismatic Joint):也被称为移动副或滑动副,两个部件之间只有一个平移自由度。
槽关节(Slot Joint):槽关节有三个旋转自由度和一个平移自由度。槽关节也可以认为是一个棱柱关节和一个球关节的组合
固定关节(Fixed Joint):固定关节约束了两个部件之间的六个自由度。
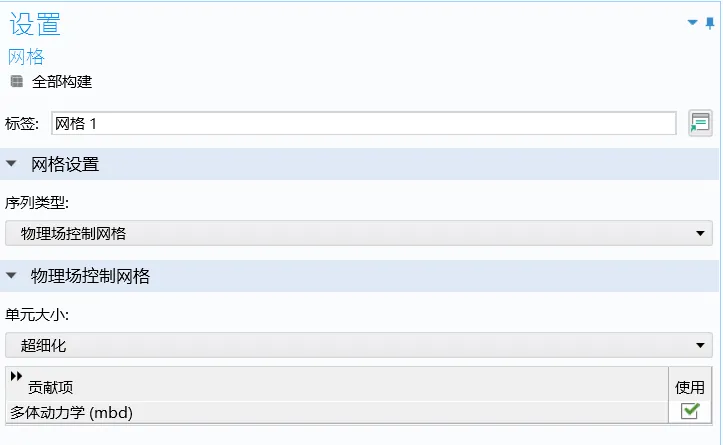
五、网格
单元大小选择超细化,全部构建网格
六、计算设置
1、点击“研究1”中的“步骤1:稳态”。在“研究扩展”中选择“辅助扫描”重点输出几个角度下的结果。在参数名称中选择“dege”,参数值列表输出几个角度值,参数单位是“°”。
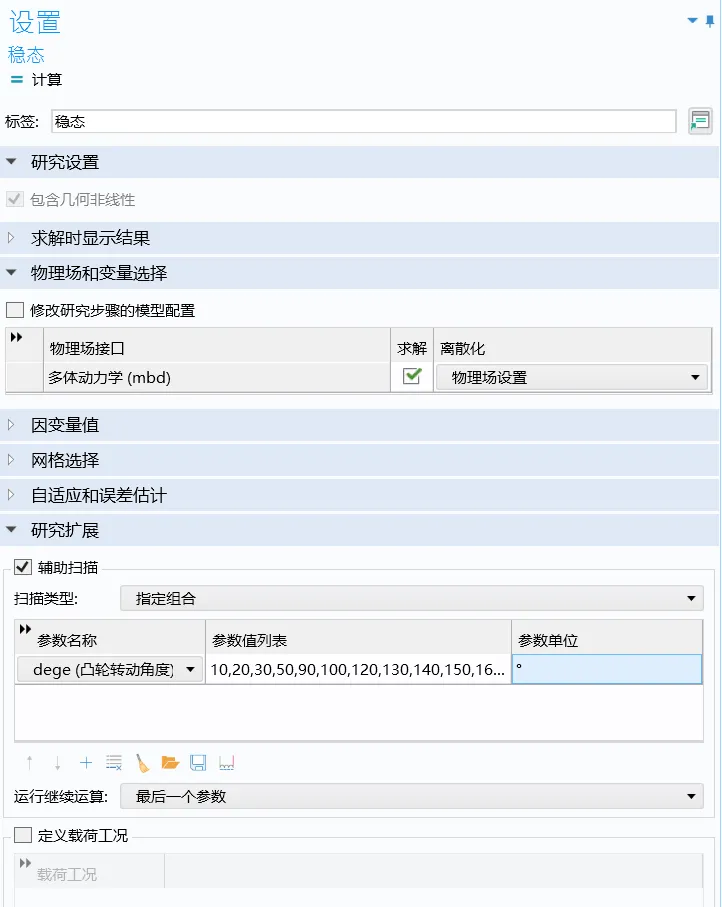
2、点击上面的“计算”,提交计算结果。
第三部分:多体动力学模型—刚柔耦合模型
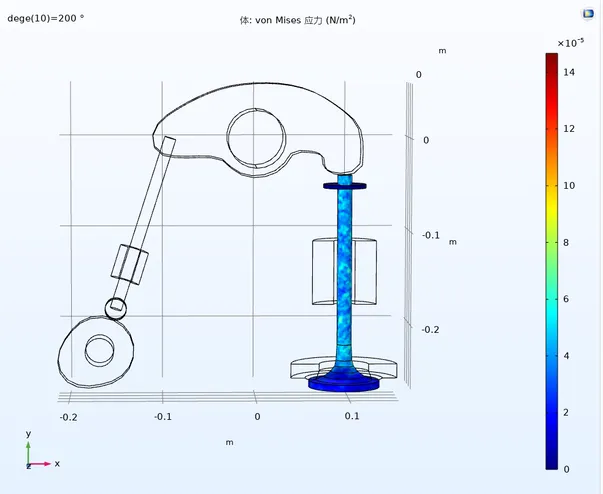
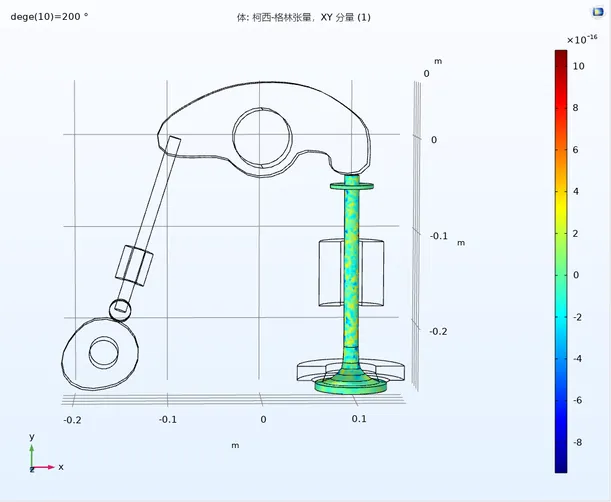
在这部分中,我们将采用刚柔耦合的方式进行仿真,将活塞杆设置为柔性体,观察活塞杆的应力情况。复制组件1,仅需要修改多体动力学模块即可。
一、柔性体创建
Comsol创建柔性体的思路是,设置了刚性域的部分按照刚体进行计算,其余部分按照柔性体进行计算。而刚体和柔性体之间的连接通过建立连接件实现。按照刚柔耦合的思路来看,整个仿真过程就会变得很简单,既然我们需要把活塞杆变成柔性体,那么仅需要把活塞杆以外的部件设置为刚性域,活塞杆的圆柱外表面,即与其它部件连接的地方设置为连接件。
1、删除刚性域“活塞杆”
2、在工具栏中点击物理场>边界>连接件,在边界选择中,选择活塞杆的外表面,注意仅需要选择连接部分即可,其它区域都不需要选择。

3、将与活塞杆有关联的运动副都替换为新的连接件。

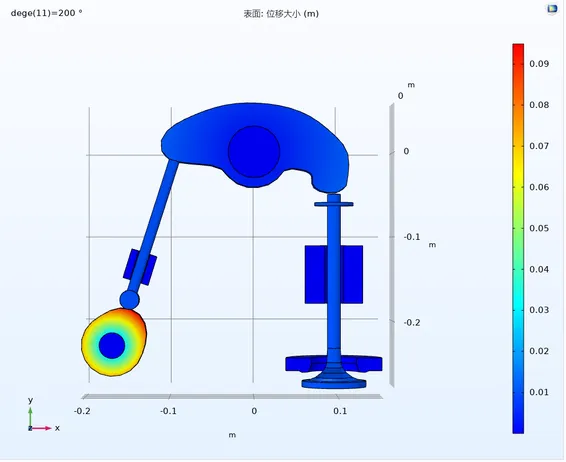
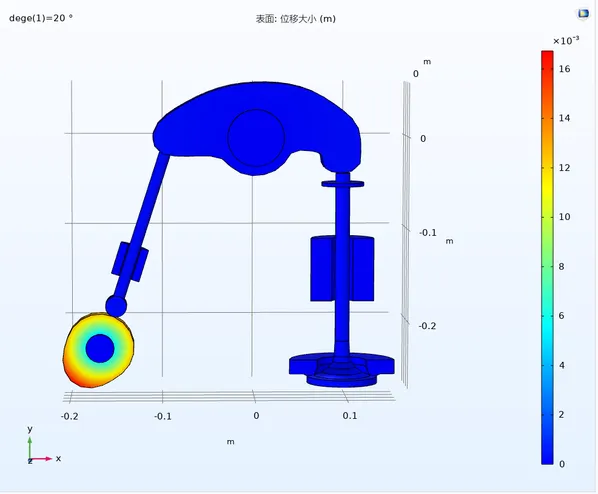
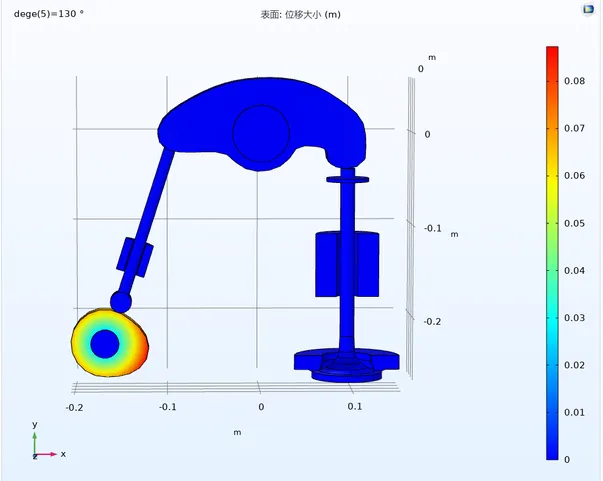
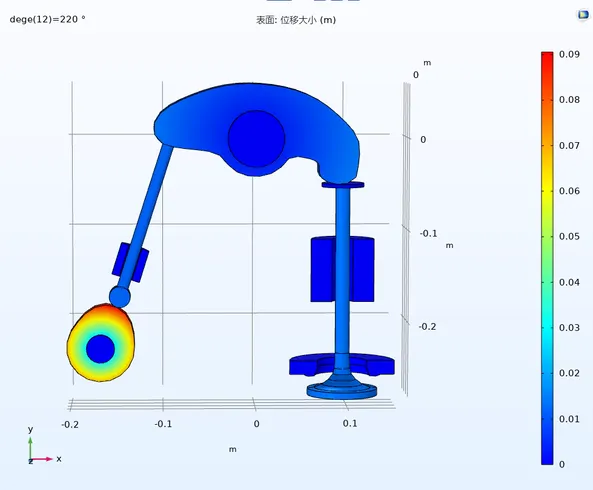
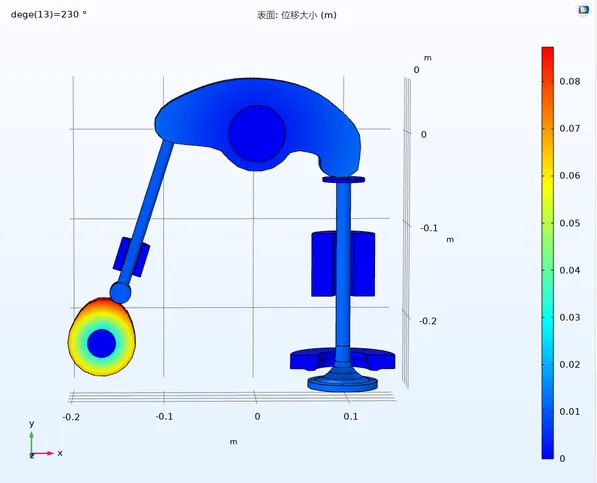
二、提交计算并查看结果
1、提交计算与第一部分相同,不需要进行过多的设置
2、可以在结果中查看活塞杆的应力变形情况
第四部分:瞬态多体动力学刚柔耦合分析
在这部分中,我们提供了一个类似的凸轮摇臂机构,同样的,可以将活塞杆替换成柔性体,也可以试制将其它的部件替换成柔性体来观察模型的变化。读者可根据上述章节的操作步骤自己动手实践一下,相信刚柔耦合你已经手到擒来啦。
总结:本文首先介绍了用Comsol进行多体动力学刚柔耦合分析的优点,之后用一个凸轮摆臂模型搭建了纯刚体的多体动力学模型,然后把活塞部分转化成了柔性体进行仿真从而来介绍刚柔耦合分析方法,最后提供了一个相类似的模型,读者可以根据提供的小模型,自己动手实践,按照文章的操作步骤选取某些部件进行柔性化。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















