















































软件

产品


根据我国人口分布情况,老龄人口的比重呈上升趋势,未来我国很有可能会面临人口老龄化并且劳动力不足的问题,而机器人能很好地解决这些问题。
目前我国工业机器人市场主要由“四大家族”:库卡,发那科,安川,ABB统治,若能实现我国高端工业机器人的国产化,将极大地为我国工业机器人发展提供有力的保障。
本作品先建立机械臂的简化模型,在ADAMS中先进行预定工况的轨迹仿真,得到各关节扭矩的波动情况,将机械臂的简化模型导入到hypermesh中进行网格划分,再导入到opstruct中进行结构的拓扑优化,负载设定为扭矩的最大值,优化目标设定为变形最小。
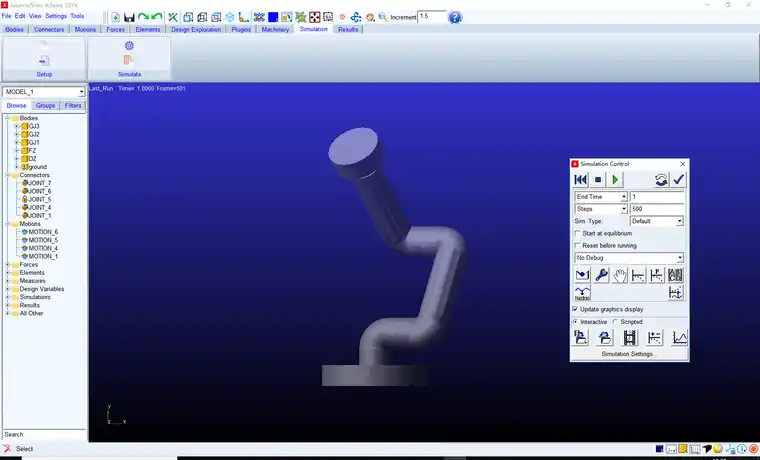

负载加速度
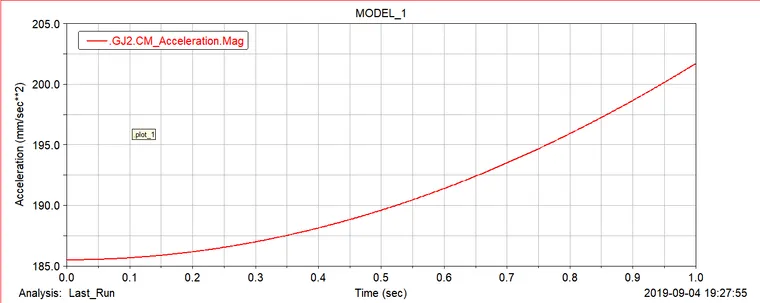
关节2加速度
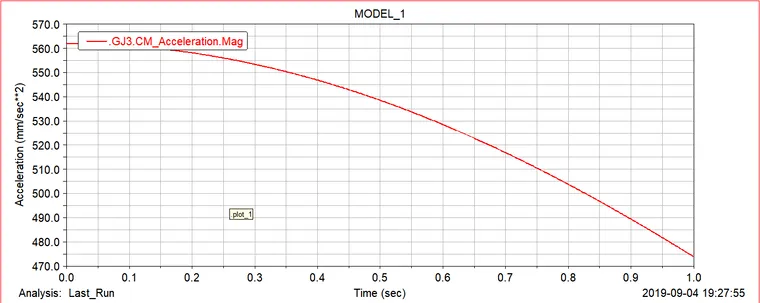
关节3加速度
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















