















































软件

产品


概述
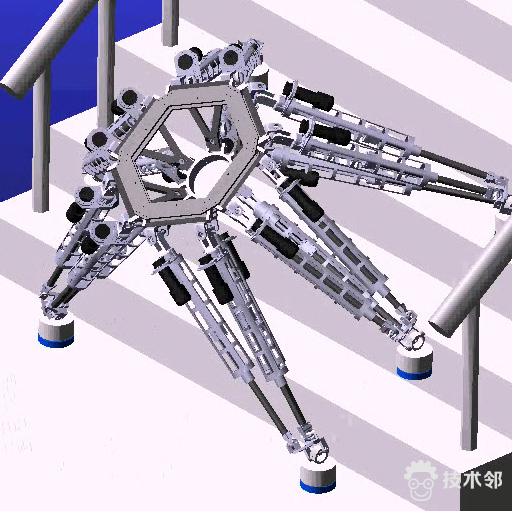
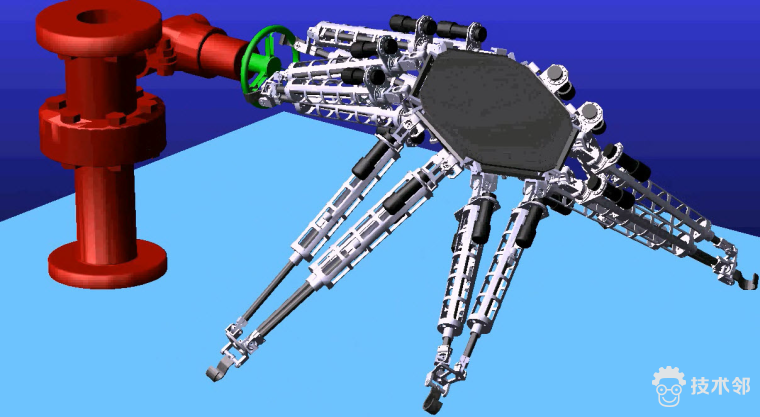
上海交通大学的研究人员,其中包括上海交通大学机械系统与振动国家实验室主任高峰博士以及上海交通大学博士后研究员潘阳博士,设计了章鱼 III 六腿机器人,可用于在核辐射、火灾及水下等极端环境中进行移动、搜索、探测、修理及救援。与轮式机器人相比,由于有腿机器人需要更加复杂的机械原理和控制策略来保持平衡、方位、效率及速度,因此设计难度更大。

挑战
上海交通大学的研究人员面临着以尽量低的成本在新机器人上**高水平的速度、有效负载、耐用性及其他参数的挑战。由于复杂动态效应的作用与日俱增,随着机器人变得越来越轻并且在更高负载下工作,设计师必须了解他们的设计方案能够承受多大的负载,在各种任务中的表现如何,以及施加到机器人各个关节上的作用力有多大,以便优化设计并交付具有竞争力的产品。
解决/验证
产品 : Adams
行业:机械/机器人
优势:
• Adams/View 能有效地用于机器人的参数化建模
• 样机的性能与 Adams 的预测非常吻合
• 在机器人设计的初期采用Adams 仿真,可节约五台额外的样机,每台的成本为 100,000 元
潘博士使用 Adams 多体动力学软件创建了完整的机器人及其所执行任务的工作样机,用SolidWorks 计算机辅助设计(CAD)软件开发了针对机器人设计方案的几何体,并编写了Adams/View 命令语言脚本,将几何体转换成Adams 模型。
潘博士表示:“Adams/View 命令语言在机器人参数化建模方面表现良好,这是因为我可以通过编程创建单个文件来生成机器人设计,然后只需更改命令语言文件中的数字就可以生成新的设计变量。”
潘博士对许多候选的机器人并联和串联机构进行了评估。Adams 能够在设计过程的最初阶段,将设计概念作为一个整体系统来评估动态性能。与通过样机实验获得同样的信息相比,潘博士借助 Adams 在设计过程初期就能以更短的时间、更低的成本对众多不同机器人设计方案的瞬态动态行为进行评估。他还可以加大机器人的速度和负载,同时确保机器人能够穿越各类不同的表面。
在确定章鱼 III 中所采用的 UP 和 UPS 组合所能得到最佳结果之后,潘博士尝试了众多不同的关节尺寸,这些工作只需更改 Adams/View 命令语言脚本中的变量即可实现。
在进行了大量的设计迭代之后,研究人员确定了可满足其所有目标的设计。此时,该团队以大约 100,000 元的成本对建造的样机进行调试。
结果
上海交通大学的研究人员在大量条件下对样机进行了测试,以评估其与预期任务的符合情况。实物实验表明,样机的性能与 Adams 预测非常吻合。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















