















































软件

产品


1、源面-路径-目标面
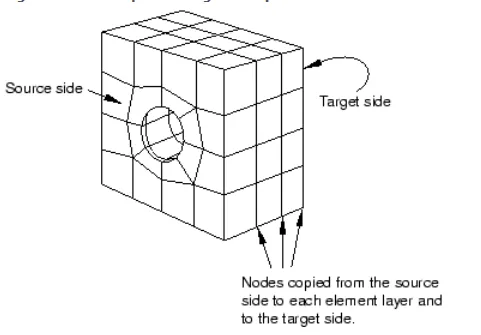
现在源面生成二维网格,然后复制网格节点,延扫略路径一个单元层一次直到目标面。路径可以是直边或者样条线。
最复杂的面(有孤立的边或顶点)作为源面。一个区域如果可以多个扫略路径,会有不同的效果(个人理解为源面的网格划分情况)
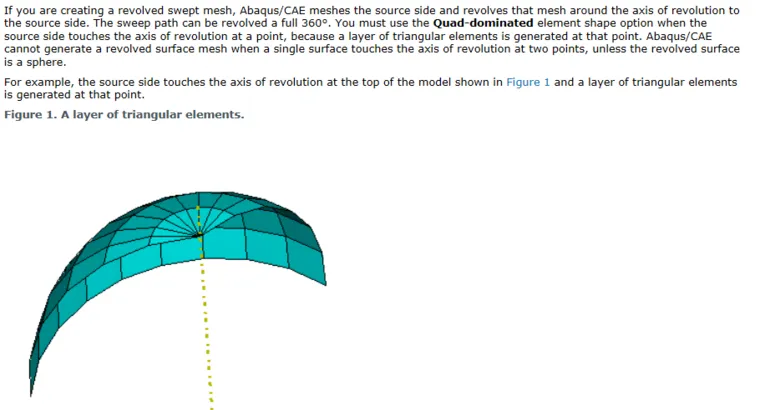
2、面扫略网格
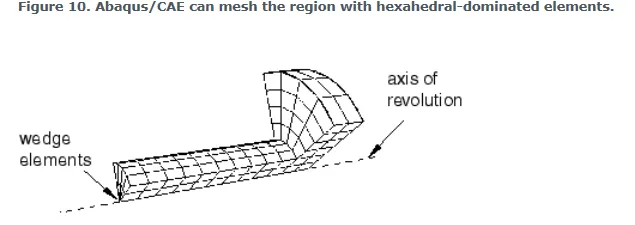
在为面旋转扫略网格,路径是边,起始和终点也是边。如果面与旋转轴相交,只能用四边形为主,轴附近需要三角形网格。
3、3D实体网格
①中性轴算法:中性轴算法首先将区域分解成一组较简单的区域。然后,该算法使用结构化网格技术将每个简单区域填满元素。如果被网格划分的区域相对简单且包含大量元素,则中轴算法生成网格的速度要快于前向算法。最小化网格过渡可以提高网格质量。网格转换选项仅适用于四边形和六面体网格划分。
②前向算法在区域边界生成四边形单元,并在系统地向区域内部移动时继续生成四边形单元。前向算法生成的单元将始终严格遵循四边形和六面体网格的播种(除非您正在创建一个三维旋转网格,并且旋转的轮廓线与旋转轴接触)。对于其他网格,与中轴算法相比,前进前沿算法生成的单元始终更接近于播种。如果要网格化的区域包含虚拟拓扑,则只能使用前向算法生成网格。
如果选择advance front算法,可以允许Abaqus/CAE在适当的地方使用映射网格。(映射网格与结构化网格相同,但仅适用于四边区域。)
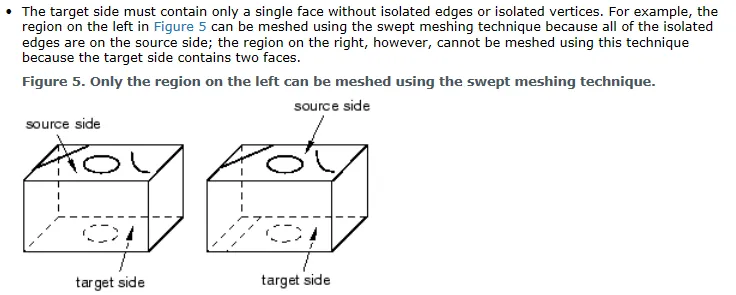
连接源侧和目标侧的每一侧必须只有一个面,或者由形成规则网格模式的四面组合面组成。
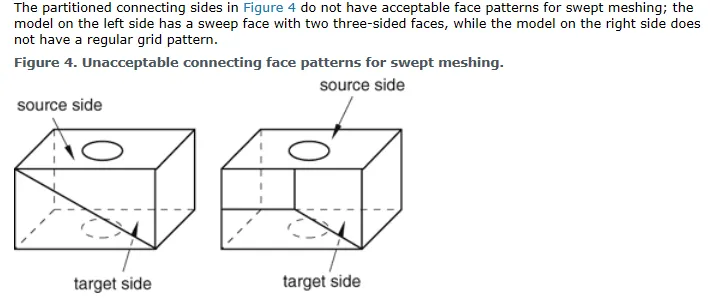
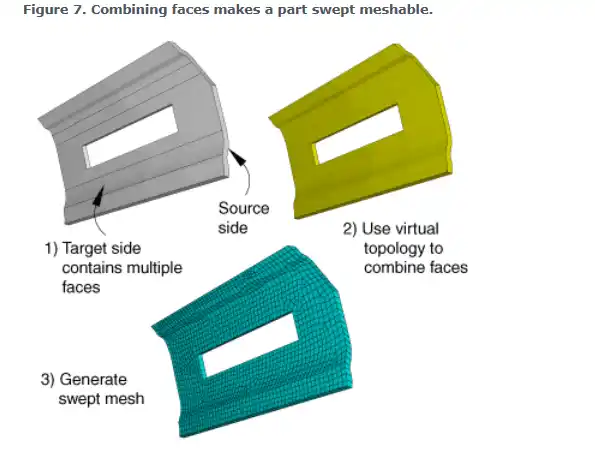
可以使用虚拟拓扑将目标侧的面组合在一起,以使扫过的部件可网格化。图7展示了使用虚拟拓扑将目标侧的5个面组合成一个面后扫过网格的部分。然而,由于该部分现在包含了虚拟拓扑,因此只需要使用前向算法就可以对其进行扫描网格划分。
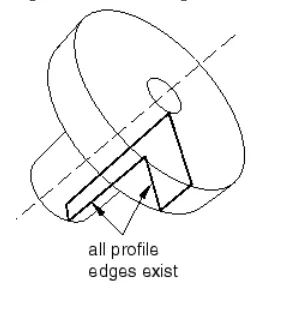
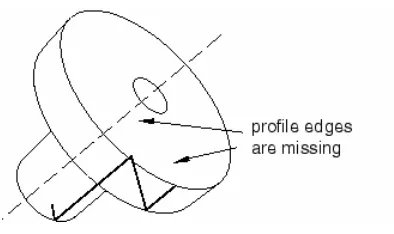
与面类似,在边接触旋转轴时。
一个没有接触到旋转轴的完全旋转区域只有当所有与轮廓有关的边都存在才可网格化。除非不存在的边沿着旋转轴线。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















