















































软件

产品


很多时候,在处理复杂装配体的时候,我们都用到MPC和Coupling。那么这么多种约束各适用于什么情况,对于承载又有什么区别呢?今天就用一个shell单元的简单案列和大家一起探讨一下。
图1 三维模型
如图一的T形连接件,通常实际工程结构是焊接件,但在有限元分析中,我们如何处理这种连接呢?通常我们会用共节点来处理,共节点把两部分当成一个部件,可以考虑连接处的变形。但也有时候,要实现共节点,需要较长时间进行前处理,因此考虑用MPC来进行连接。
今天对于这个薄壁件(壁厚1mm),我建立6个模型分别是:1 共节点2kinematic coupling 3MPC BEAM 4MPC Link 5 MPC Tie 6 MPC Pin,分别用7种方式处理这个连接,每个模型建立三个分析步,第一个分析步施加拉伸载荷,第二个分析步施加竖向载荷产生弯矩,第三个分析步施加扭转载荷,如图二所示。

图2 三种载荷工况
结果分析
求解过程中,使用MPC-Pin和MPC-Link的两个模型算到第二步(弯曲载荷)时第一个增量步不收敛,其余模型顺利计算完成。究其原因,我们知道杆单元是不能承受弯曲载荷的,这里的Link便是将两节点使用刚性杆单元连起来,而Pin是将两节点的三个平移自由度绑定到一起,也不能承受弯曲载荷。同样扭矩载荷也是不收敛的。
再看看拉伸载荷工况结果:6种处理方式在拉伸载荷下结果几乎是一致的,可见,它们均可传递拉力载荷。

图3 拉伸载荷应力云图
弯曲载荷工况结果:剩下四种方法应力大小及分布也是几乎一致的。
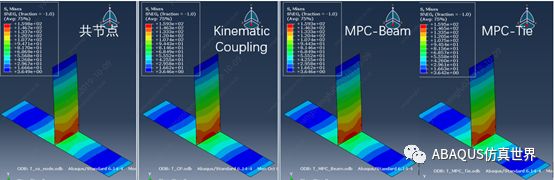
图4 弯曲载荷应力云图
再看扭转载荷工况结果:四种方法得到的应力大小及分布也是几乎一致的。

图5 扭转载荷应力云图
结论
由本案例可知,对于shell单元文中提到6种连接方式,MPC-Link及MPC-Pin不能传递弯曲和扭转,其余四种几乎是等效的。后续,针对实体单元再做验证。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















