















































软件

产品


00 背景
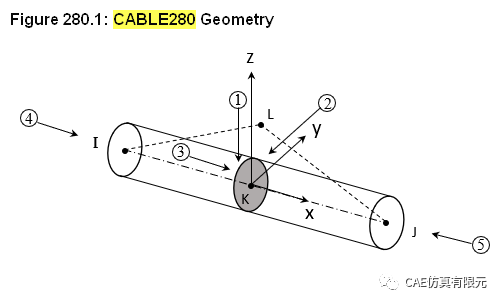
绳索滑轮系统在生活和工程中都很常见,在ANSYS中,绳索一般使用Cable280单元。每个节点有三个自由度。
01 导读
对绳索滑轮系统的分析有以下两种建模方法。
1)如果是小变形分析,可以不建立滑轮,在滑轮和绳索连接处定义绕滑轮圆心的转动。本文有案例演示。
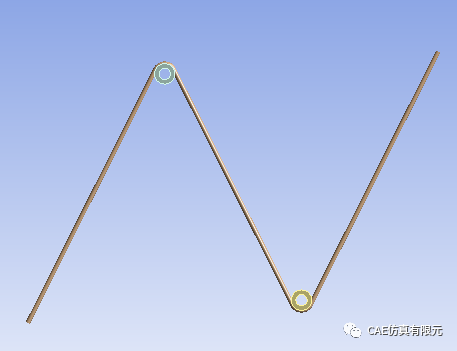
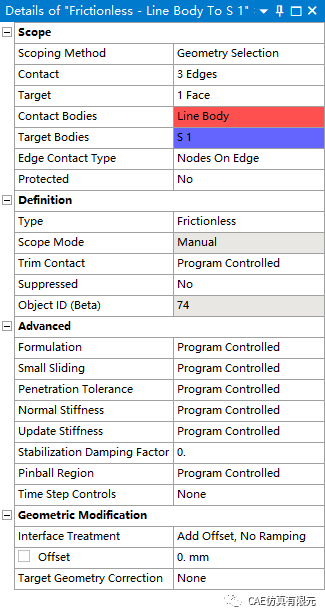
2)如果不是小变形场景,那么需要建立滑轮实体模型(可以不考虑细节),定义绳索和滑轮的非线性接触(线-面接触)。本文有案例演示。
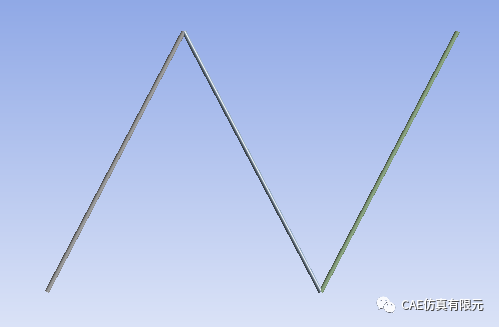
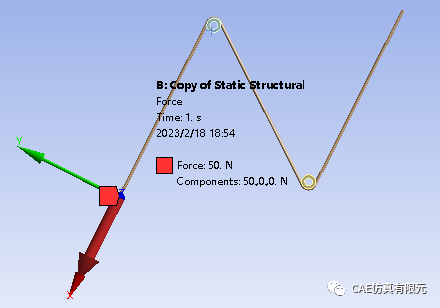
02 几何模型
几何模型如下图所示。
03 材料模型
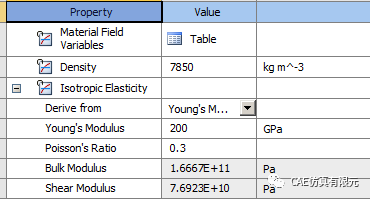
本文使用到的材料参数如下。
线弹性。
04 网格划分
线体网格划分非常简单。
05 分析条件
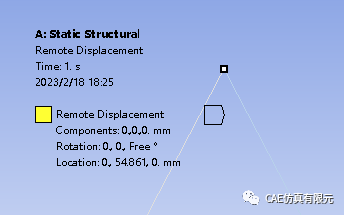
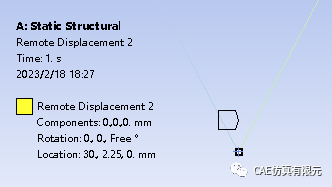
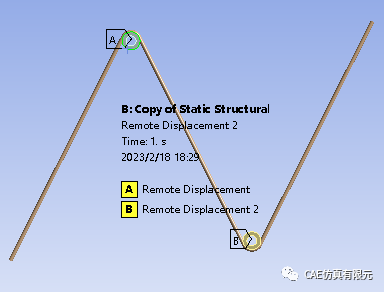
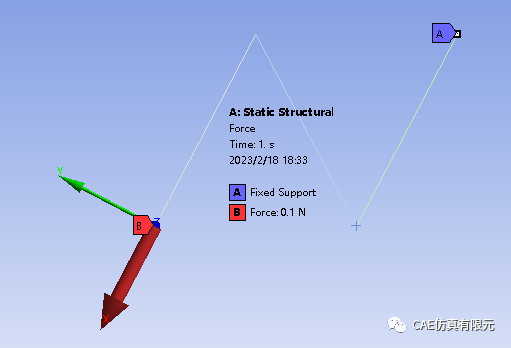
1)无滑轮模型,定义绳索一点绕滑轮圆心转动。
2)有滑轮模型,滑轮定轴转动,定义绳索和滑轮的接触。
06 仿真分析
06.1 无滑轮模型
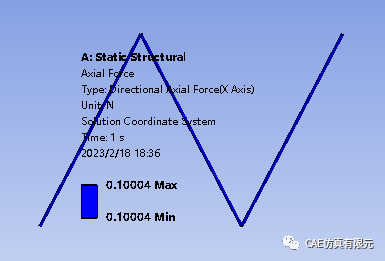
外力很小0.1N,小变形分析。
绳索轴力均匀,分析有效。
位移。

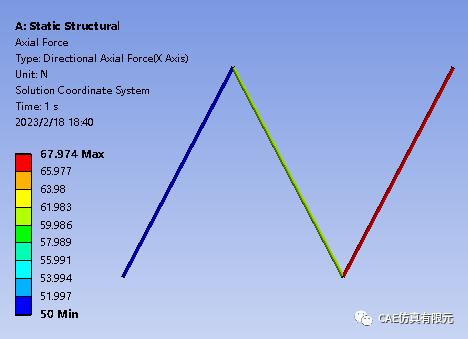
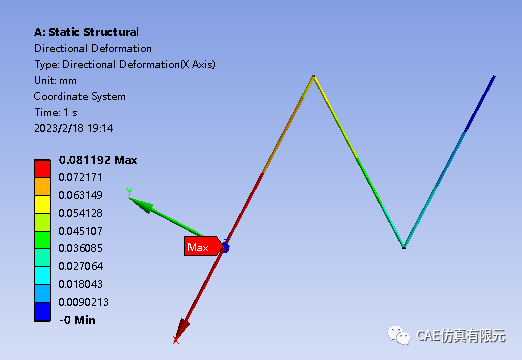
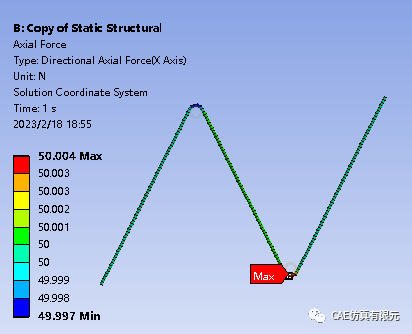
外力较大50N,非小变形分析。
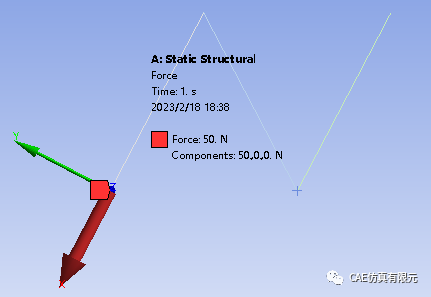
绳索轴力非常不均匀,分析无效。
位移。
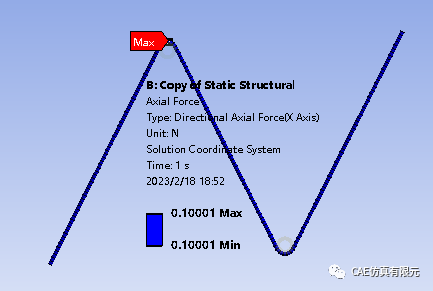
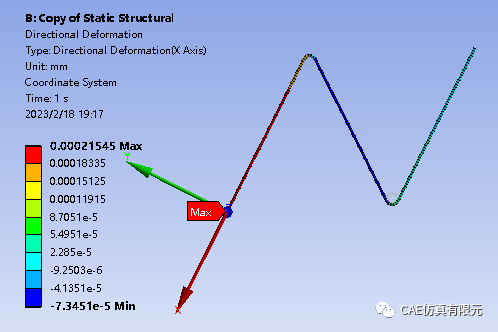
06.2 有滑轮模型
外力很小0.1N。

绳索轴力均匀,分析有效。
位移。
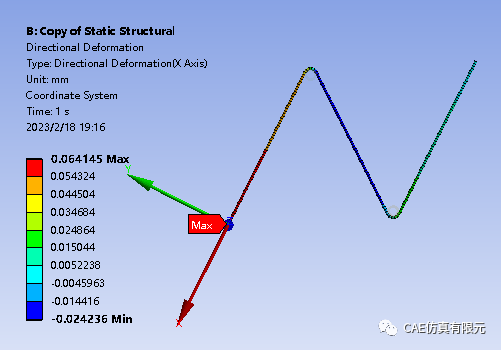
外力较大50N。
绳索轴力均匀,分析有效。
位移。
07 总结
汇总以上分析结果。
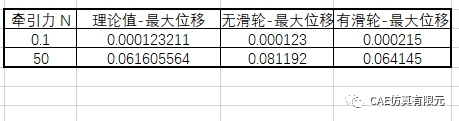
1)无滑轮模型,在小变形下的分析结果和理论值高度一致,在非小变形下的分析结果和理论值差距较大。
2)有滑轮模型,在小变形下的分析结果和理论值有差距,是因为接触算法导致的误差,在非小变形下的分析结果和理论值高度一致,是因为接触算法
导致的误差相比较小,并且理论计算没有考虑绳索受拉变细的影响。
3)以上分析的滑轮都是定滑轮,动滑轮的仿真方法交给读者自己思考。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















