















































软件

产品


相信很多人都看了很多关于LS-dyna的接触理论资料,但发现实在是难以看下去,就算看进去了,对一些关键字的设置还是不懂怎么填。在这里,我就写一些关于接触参数怎么设置,这些设置都是自己经验所得,说的不对的还望各位指点一二。
1. 常用接触类型
最常用的接触关键字有两种,分别是:
*AUTOMATIC_GENERAL
*AUTOMATIC_SINGLE_SURFACE
其中,*AUTOMATIC_GENERAL能够很好地处理壳的边-边接触和梁-梁的接触,他比*AUTOMATIC_ SINGLE_ SURFACE需要更多的计算资源。
另外,*AUTOMATIC_ SINGLE_ SURFACE这个接触是官方推荐的,在碰撞模拟中应用最多的接触类型。
主要用于面-面接触的关键字是:
*AUTOMATIC_SURFACE_TO_SURFACE
有局部一些关键接触是面与面接触的可以用这个关键字,最好将局部的主从面定义一个集(我一般都会定义一个*SET_ SEGM)。
两个零件类似焊接、强力胶粘在一起,或者有的塑胶中会嵌入一些金属件,这样的接触可以用关键字:
*TIED_SURFACE_TO_SURFACE
*TIED_SURFACE_TO_SURFACE_OFFSET
这里也是局部选择粘接的面,设置主从面的集,设置一个关键字*SET_SEGM。
2. *AUTOMATIC_GENERAL参数解释
这里只拿*AUTOMATIC_GENERAL当中的参数进行讲解,其他类型的接触设置与之大同小异。

SSID、MSID和SSTYP、MSTYP,SSID、SSTYP表示从面的设置,MSID、MSTYP表示主面的设置。(MSID和MSTYP类比可知)SSTYP约束了SSID中选择的类型,SSTYP中包含七种类型,0代表段面集,2代表壳单元集,4代表单个零件集,其他类型可看卡片底部说明栏。
SSID选择对应的集,这里如果SSID=0,则代表所有零件都参与接触计算,但计算时间会增加一点,这个时间相对较少,对我来说这个时间不算什么,比绞尽脑汁去想各个零部件之间已经发生的接触和碰撞之后可能的接触要方便的多。但如果是其他软件就不敢保证计算时间仅仅只增加一点点,像Dytran中如果选择全部零件做接触计算,时间是成指数增加。因此,在用LS-dyna模拟时,一般都默认全部零件都接触就行,这个接触算法相对来说还是很方便的。
主面、从面定义的一般原则:
粗网格表面定义为主面,细网格表面为从面;
主从面材料刚度相差较大,材料刚度大的一面为主面;
平面或凹面为主面,凸面为从面。
FS、FD,FS表示静摩擦系数,FD表示动摩擦系数。这里可以都考虑为0,对计算结果影响不大,如果要得到很精确的结果,将摩擦考虑进去也是可以的,不过会增加一点计算时间。
VDC表示粘性阻尼系数,用来降低碰撞过程中接触力的高频振荡。对于较软的材料(如泡沫材料),VDC可以设置为40-60,这样可以提高模型的稳定性。对于金属间的碰撞接触问题,VDC一般设为20。
SFS、SFM表示罚因子,用于增大或减小接触刚度。
SOFT也是控制接触刚度,这里推荐使用SOFT=1,这样的接触会更加贴近实际一点。
IGNORE表示是否允许初始穿透,一般推荐IGNORE=1,表示通过追踪初始穿透零件,允许初始穿透存在。
其他参数一般情况可以默认即可。
3. *CONTROL_CONTACT参数解释
在LS-dyna还提供了接触控制参数,上述*CONTACT关键字是对每个具体的接触提供“局部”的参数设置,优先权较高;而*CONTROL_CONTACT则对整个模型中的接触提供一种“全局性”的参数设置。
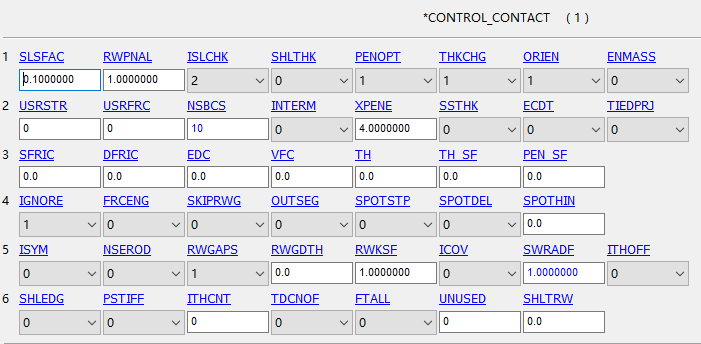
SLCHK表示是否对模型进行检查初始穿透,1表示不检查,2表示全面检查。如果你确定没有穿透,可以选择1;但是对于复杂的模型最好还是推荐选择2。
SHLTHK表示是否考虑厚度偏置,0表示不考虑厚度偏置;1表示只考虑变形体厚度偏置,不考虑刚体厚度偏置;2表示变形体和刚体都考虑厚度偏置。你如果没有壳单元,这里保持为0即可。
IGNORE这个与*CONTACT中的类似,推荐选择1。
THKCHG表示是否考虑壳体厚度变化,0是不考虑,1是考虑。以上所有需要考虑的特征,均会增加一些计算时间,如果模型较小推荐都考虑,这样结果保证正确且时间不会增加很多。
ORIEN表示控制接触段的接触方向,必须保证所有接触段的法向一致指向接触面,一般推荐ORIEN=1。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















