















































软件

产品


激光雷达就是一种发射激光以用来探测物体速度、位置等特征量的装置。相比于传统摄像头,激光雷达隐蔽性更好、重量更轻、分辨率更高。凭借着这些优点,激光雷达现已经广泛使用于军工、农业、水利等各行各业。在汽车领域,激光雷达 多以感应设备的身份出现在自动驾驶方面。
车载激光雷达主要由激光发射器和接收器两部分组成。按照发射的激光线束可分为单线、4线、8线等多种,其中32线、64线和128线最为常用。除此之外,按照扫描方式的不同,可将激光雷达分为机械式激光雷达、混合固态雷达和纯固态激光雷达。由于技术不足和价格原因,目前车载上使用最多的是混合固态雷达。
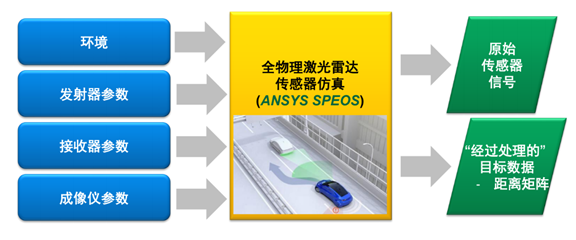
激光雷达的物理模型:
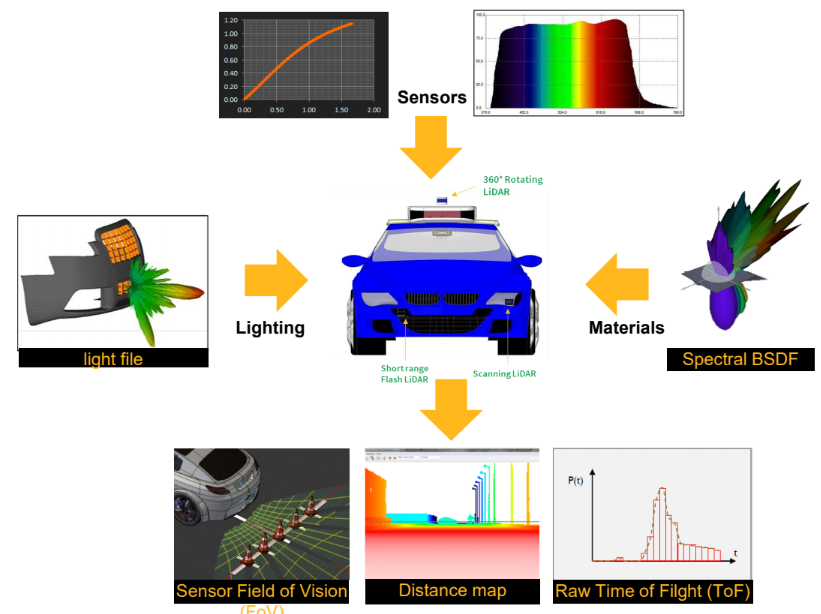
激光雷达的模拟流程:
激光雷达的分类:
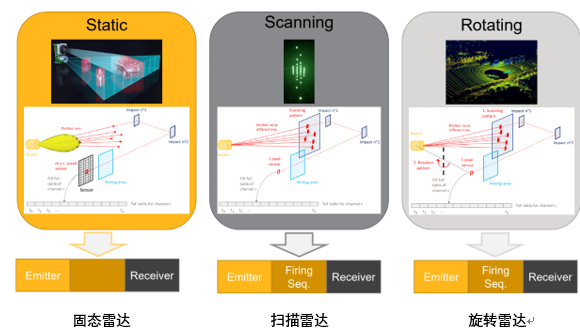
1.固态雷达
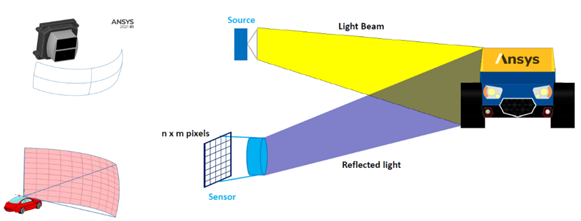
发射激光光束,然后传感器上接收反射光,并对光信号进行记录. SPEOS 在TOF数据文件中记录每个像素数据
2.扫描雷达
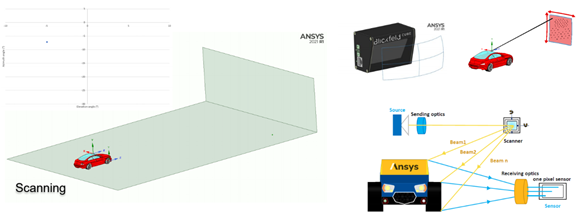
扫描雷达通常使用扫瞄镜连续发射激光光束,不同方向上收集反射光到传感器上.
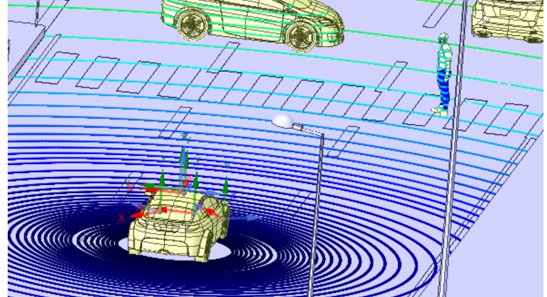
3.旋转雷达
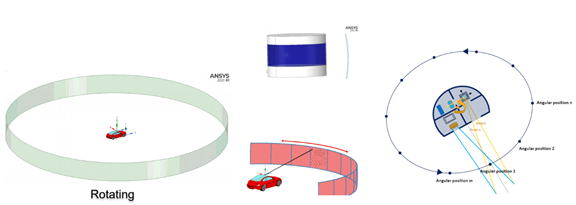
创建一个几何旋转激光雷达模拟,可以进行视场研究。视场研究可以快速识别激光雷达系统中哪些可以或必须优化(例如,传感器的数量、位置和方向)。
激光雷达模拟结果:
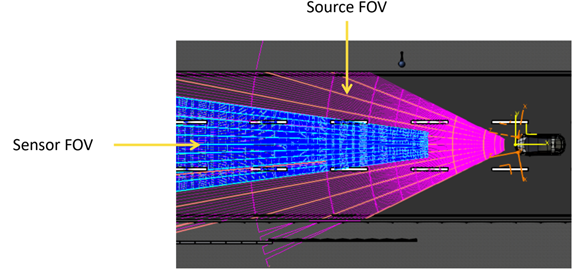
1.视野检查
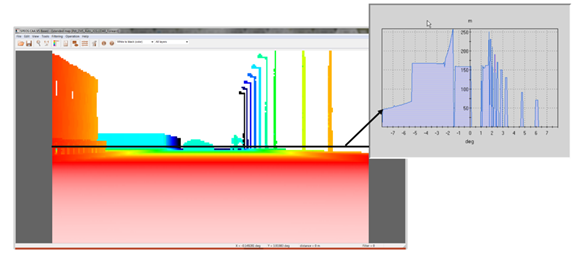
2.TOF数据
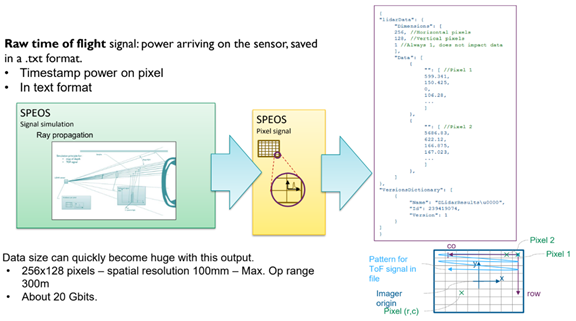
TOF数据是激光飞行时间的原始数据,处理后可以获得探测物体的距离信息。
3.深度图
可以获取到每个探测点的深度信息并生成深度图(仅适用于固态雷达)。
4.点云
将探测点可视化在3D界面,并通过点的颜色直观获得距离信息。
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















