















































软件

产品


作为智能驾驶系统的重要组成部分,传感器为感知系统提供原始数据,其性能对整个智能驾驶系统的功能和性能有直接且重要的影响。
为提高智能驾驶系统开发的效率和效果,会采用仿真的方式对方案进行验证和优化,涉及全数字仿真、半实物仿真等。为使仿真结果尽可能真实地反映实际情况,需要对摄像头、激光雷达、毫米波雷达等传感器进行高精度的建模仿真。
针对此类应用,经纬恒润联合ANSYS公司,提供包括光学及视觉模拟软件SPEOS和光学虚拟现实仿真软件VRXPERIENCE的智能驾驶传感器高精度仿真解决方案,依据对象的真实物理属性进行传感器和场景的高精度仿真。
产品介绍
ANSYS SPEOS & VRXPERIENCE解决方案在智能驾驶领域可应用于摄像头、激光雷达、毫米波雷达传感器的建模仿真,涉及像素网格投影、成像仿真、图像后处理接口、机器视觉、ADAS部件级仿真、实时灯光仿真、动态前照灯性能评估、传感器性能评估等。可以在智驾系统研制早期,基于真实物理属性进行不同天气、时间、路况、光学传感器安装位置、安装数量、传感器设计方案、材料设计方案、照明设计方案等条件下的仿真模拟,对不同设计方案进行验证,节约样件和测试成本,缩短研发周期。
• ANSYS SPEOS
ANSYS SPEOS与SpaceClaim、CATIA V5、UG、CREO等主流CAD软件平台相结合,能够实现从结构设计到光学设计的无缝衔接,以OMS设备的光学属性测量结果作为软件的输入,基于材料的真实物理属性进行传感器及现实场景仿真,模拟结果可直接与实物照片进行对比。
SPEOS可以通过数字化建模为摄像头和激光雷达传感器提供测试环境,快速直观地将驾驶环境中摄像头和激光雷达的成像结果模拟出来。结合CAD平台,可以根据摄像头和激光雷达的三维造型、物理属性、约束条件,仿真传感器系统采集的数据,用于验证摄像头和激光雷达结构对成像的影响,探测器晶片对成像质量的影响,如CCD的光谱敏感性、动态范围、白平衡、像素大小与分布等对摄像头成像产生的影响,可以在早期设计阶段方便地评估不同设计方案在感知性能方面的区别。
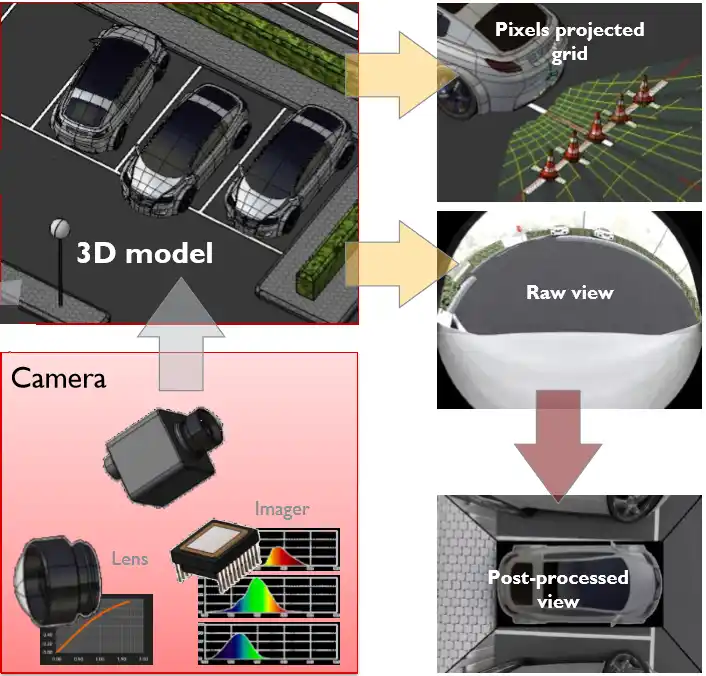
光学传感器监测系统模拟仿真分析
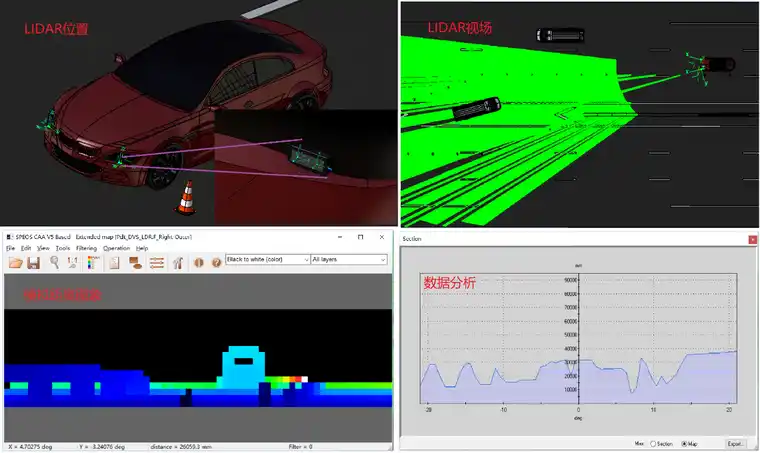
激光雷达传感器模拟仿真分析
SPEOS可以通过流明、出光角度和光谱等对LED等光源的光形进行定义,并通过车灯的CAD结构设计、照明布局位置,光学材质等对光的传播路径进行定义,通过仿真给出空间内光强分布等,并可通过人眼视觉模型给出亮度分布等。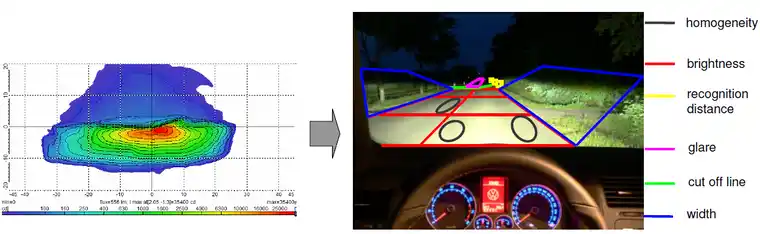
车灯仿真结果
• ANSYS VRXPERIENCE
ANSYS VRXPERIENCE是一个整合多个功能的虚拟现实仿真平台,包括虚拟驾驶仿真平台、实时物理仿真平台、人机交互平台、虚拟现实平台、感知质量仿真与审核平台、声音设计分析与评价平台,帮助用户体验和评估产品性能,验证新技术,加快设计和决策。

VRXPERIENCE虚拟现实仿真平台
ANSYS VRXPERIENCE中,和智能驾驶传感器仿真强相关的模块如下:
ANSYS VRXPERIENCE Sensor:基于物理特性的传感器仿真模块,用于在虚拟驾驶环境中评估摄像头、激光雷达和毫米波雷达的性能对感知系统、智能驾驶系统功能和性能的影响。通过模拟传感器捕捉到的周围环境图像,测试传感器位置及参数的合理性,为图像算法提供数据输入,实现极端环境的虚拟测试等。
摄像头模型能够兼容标准和鱼眼两类摄像头类型,可以对两类摄像头的物理参数进行详细定义 :
♦ 镜头参数,如镜片材料、 焦距、焦距对应波长、光阑大小、光阑形状等
♦ 图像传感器参数,如分辨率、几何尺寸、曝光时间、像素填充系数等
♦ 处理器参数,如缩减位深(Bit Depth Reduction)、衍射伪影(Diffraction Spikes)等
♦ 摄像头位置,如高度、深度、偏移、俯仰角、偏移角
♦ 风挡参数,如入射角、 纵向曲率半径 、折射率、厚度等 基于以上物理参数对摄像头进行建模,并考虑环境光源和材料表面光学属性的影响,在动态驾驶仿真过程中能够实时输出与摄像头成像原始图像数据,并包含因摄像头性能、外部光照和曝光策略而在成像中出现的色散、畸变、噪点、高亮溢出等现象。
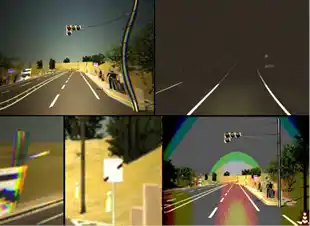
基于物理特性的摄像头仿真
激光雷达模型兼容旋转式和固态Flash类型,可以对两类激光雷达的物理参数进行详细的定义:
♦ 环境参数,如大气消光系数
♦ 脉冲发射器参数,如光束发散角、脉冲线数、探测距离、脉冲发散角等
♦ 接收器光学组件参数,如反射次数、光阑大小、视场角等
♦ 接收器电学组件参数,如截止电流、响应度等
♦ 接收器预处理参数,如采样频率、比特数等
♦ 装车位置,如高度、深度、偏移、俯仰角、偏移角
基于上述物理参数的建模以及对场景环境光源的考虑和材料表面光学属性的影响,在动态驾驶仿真过程中,可实时输出原始波形数据、强度谱数据和点云的空间位置数据,可以帮助设计人员评估外部环境光和材料表面不同色深、材质对雷达探测结果的影响。
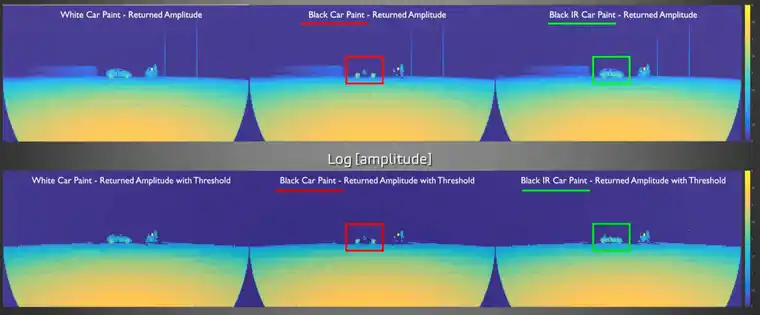
基于物理特性的激光雷达仿真
毫米波雷达模型支持单模和多模,可对以下物理参数进行详细定义:
♦ 天线参数,如发射功率、实际增益、安装位置等
♦ 波形参数,如采样窗口类型、中心频率等
♦ 调频连续波形参数,如波形的频率带宽、采样率等
♦ 脉冲多普勒系统参数,如波形的频率带宽、频率样本数等
♦ 性能波形参数,如距离分辨率、失真范围、失真速度等
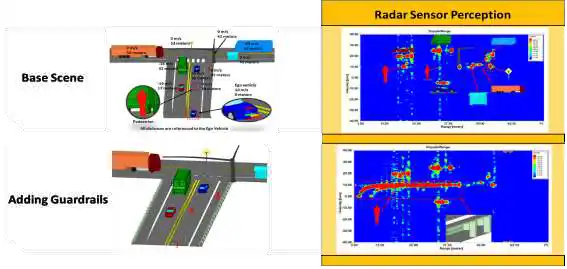
基于物理特性的毫米波雷达仿真
传感器需要与外部环境发生交互,物理场的计算需要耦合环境与传感器模型进行联合仿真,实现基于物理特性的传感器高精度仿真需要有对应的3D物理环境仿真的能力。ANSYS提供用于环境物理场模拟的3D场景仿真环境,摄像头、激光雷达和毫米波雷达传感器模型集成在该平台内。为进行光线和电磁波在空间中的传播和物体的反射、折射的仿真,在构建三维环境的几何模型之外,还需要对物体表面材料属性进行定义。仿真环境提供常用材料属性库,也支持通过ANSYS的OMS硬件设备,对用户所需仿真的场景材料进行测量,并将所得材料表面光学属性BSDF函数附在前述场景建模的所属材质表面。
ANSYS VRXPERIENCE Headlamp:车灯路面光型仿真模块,可以导入SPEOS计算获得的光分布结果,结合3D场景,对环境的光强分布进行仿真,提供丰富的色度、光度学分析工具,包含等照度线、等照度区域等信息,并通过光强分布IES文件和光谱Spectrum文件对自然光源、路灯光源等进行定义,为夜间环境智能驾驶系统仿真提供高精度的环境模型。
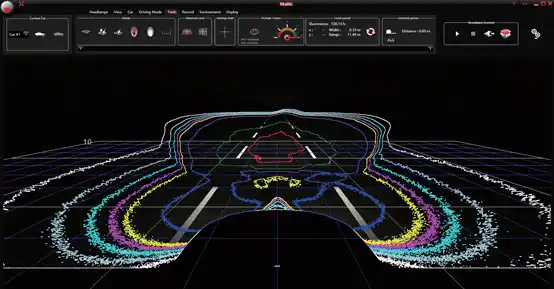
ANSYS VRXPERIENCE Headlamp
ANSYS VRXPERIENCE Driving Simulator:动态驾驶模拟解决方案,可以仿真实时场景、车辆以及交通环境,支持道路、车辆的创建和编辑,提供闭环仿真运行的平台,结合Headlamp和Sensor,可以针对夜间场景、需要考虑传感器物理特性影响的场景、需要对感知系统性能进行验证的场景,提供全数字、半实物的验证环境。

ANSYS VRXPERIENCE Driving Simulator
应用案例
• 日本某供应商,需要进行ADAS传感器分析,希望采用真车多次重复测试的方式保证系统质量,技术和项目进度均不能满足要求。借助于ANSYS SPEOS & VRXPERIENCE,通过建立复杂的场景,并结合基于物理特性的摄像头和激光雷达模型,对传感系统进行多次测试,降低了项目周期和费用。

ADAS传感器分析-日本某供应商
• 美国某OEM,在L2、L3的功能安全分析中,需要综合考虑传感器位置和性能,并进行传感器数据融合测试,“视景系统+动力学+控制联合仿真”方案无法满足技术和项目周期需求。借助于SPEOS进行头灯光学高精度仿真,基于VRXPERIENCE Sensor的传感器仿真对系统性能进行了验证,并深化了对系统特性的认知。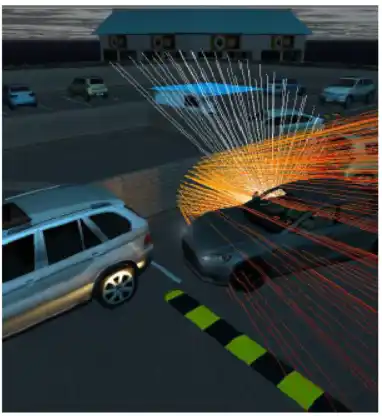
ADAS软件虚拟测试-美国某OEM
• 日本某OEM,在ADAS系统测试中,已有的HIL测试系统无法提供车灯仿真和摄像头的物理模型,基于路试进行夜间场景的验证,项目进度较慢。借助于SPEOS进行车灯仿真,并将结果输入到VRXPERIENCE Headlamp中,结合基于物理特性的摄像头模型,形成了针对夜间场景的HIL测试系统,减少了路试,每年节约费用约100万美元。
• 欧洲某供应商,因为目前市面上仿真工具大多只能进行基础场景测试,无法覆盖边缘场景,在L3/L4的功能测试中,耗费大量人力物力进行路试。借助于SPEOS & VRXPERIENCE,通过传感器高精度仿真减少了路试。

ADAS软件虚拟测试-欧洲某供应商
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















