















































软件

产品


近年来, 自主水下机器人 (autonomous underwater vehicle, AUV) 一直是水下机器人领域的研究热点, 已经在海洋科学研究、海洋资源调查和海洋安全保证等方面得到了广泛的应用。水下机器人水动力分析与优化直接影响到续航力等主要技术指标,越来越得到关注与重视。
2019年中国海洋经济博览会上,看到了多来越多厂家推出了自己的水下机器人产品,象征着行业的高速发展和持续繁荣。

CAESES 软件作为CAE设计优化平台,可以方便的构建出各类AUV模型,同时支持各种连接外部求解器(例如CFD求解器),通过优化算法找到更为合适的设计方案。AUV特点是形状主尺度多变并不固定,长度,直径等参数都有可能有较大的变化范围。通常我们使用CFD计算手段作为AUV水动力分析的手段,但CFD单个计算耗时较长,在有限的时间内往往探索设计空间有限,NavCad作为美国HydroComp公司船舶专用的阻力推进性能分析软件,高级版本支持脚本运行以及AUV的水动力分析,计算速度快,可以很好的作为CAESES耦合求解器solver,自动计算每个AUV设计的阻力和推进性能,进行更多设计方案的探索,可作为CFD优化的的前置工具,为CFD优化提供更好的“初始设计”。
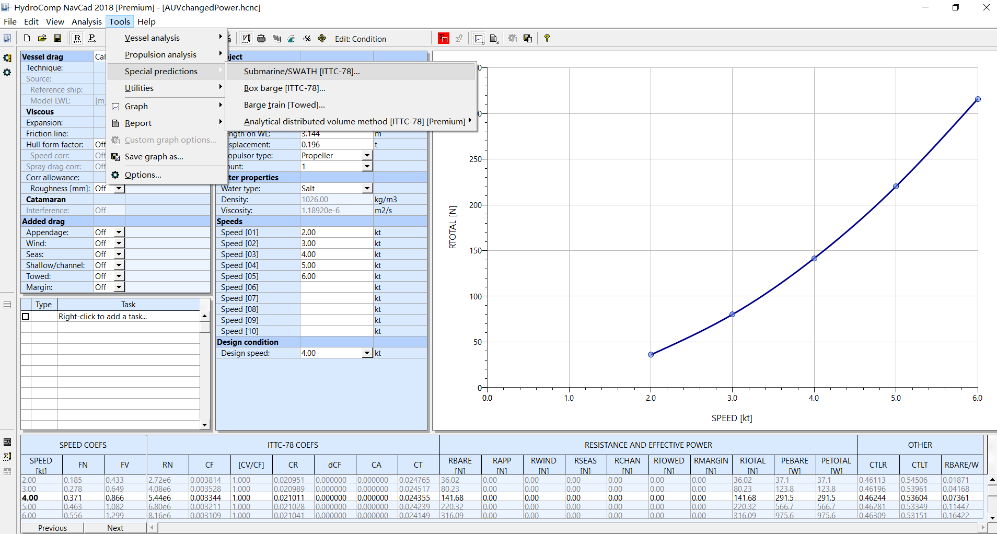
NavCad中,提供了submarine and SWATH 的预估模型,通过类圆柱形的定义定义几何特性,如下图显示:
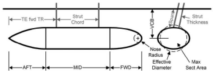
除了常规的计算方法外,NavCad还提供了基于 HydroComp 58类模型试验数据得到的独有方法,提高评估的准确性。
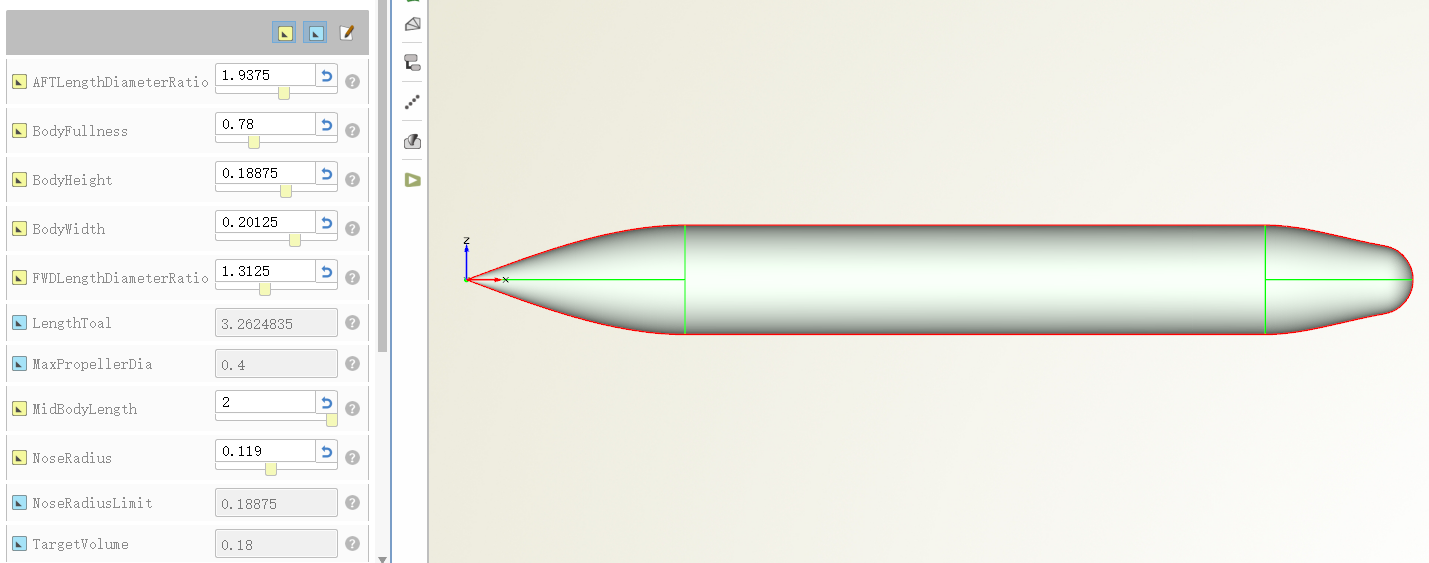
CAESES作为CAE优化设计平台,需要结合第三方求解器,通过求解器的计算结果驱动设计的演变。在CAESES中我们可以进行全参数化的几何,例如AUV案例这种模型;也可以导入现有模型,进行变形,我们称之为半参数化模型。
本次AUV的研究主要目标是在排水量一定的情况下,以求减小阻力和功率的消耗。
每次计算包括阻力的评估以及和一款三叶定距桨的自动匹配(盘面比固定为0.45),螺旋桨的匹配是通过NavCad内部的螺旋桨优化方法进行。在给定推力的情况下,NavCad可以选择出“更优效率螺距”。
Sobol是CAESES中一种常用的试验设计(DoE)方法,可以很好的表征探索整个设计区间。本案例计算了超过1000个Sobol计算,NavCad求解计算在一般办公电脑(i5,8GB)上运行,只需要不到10秒钟的时间即可计算一个方案。
案例的计算条件如下:
· 设计变量: 筒体的直径,首部和尾部的长度与直径比
· 求解器: NavCad Premium
· 目标:阻力和/或 功率最小
· 范围:固定180 kg 排水量, 4 knots 设计航速, 直径范围在0.28m~0.4m之间。
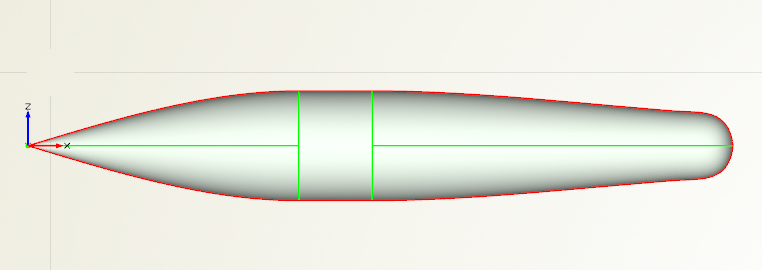
较好结果:长2.47m,直径0.38m,阻力20.7N, 功率 45.1W
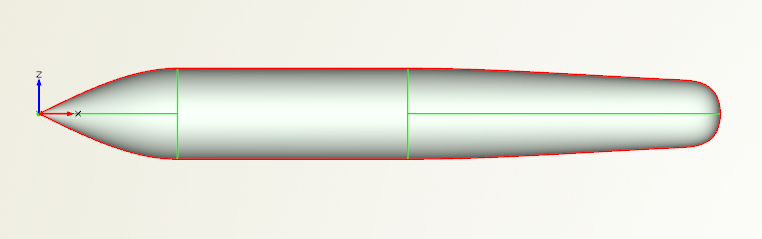
较好结果:长2.40m,直径0.35m,阻力22N, 功率 47.7W
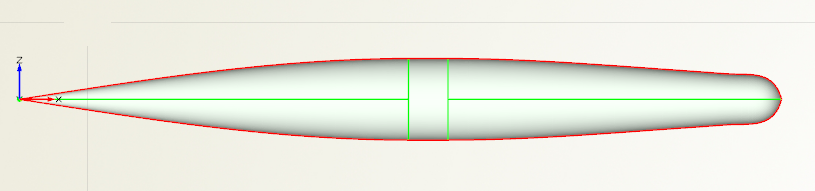
较差结果:长3.86m,直径0.36m,阻力48.4N, 功率 102W
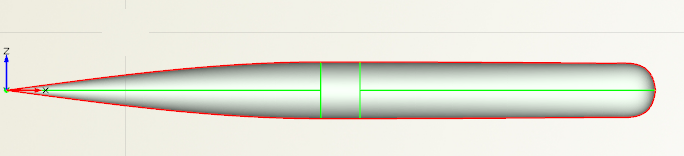
较差结果:长3.29m,直径0.35m,阻力43.9N, 功率 92.8W
通过CAESES 的实验设计(DoE)Sobol分析,显示较短的长度与大直径的组合可以得到相对较小的阻力与功率,这与我们的常规预测相符。这种组合可以使得湿表面积较小,从而使得阻力值较小(粘性阻力占主要部分),当然根据设计和限制条件的不同,结果可能不禁相同。
此外,如果AUV如果运行在水面或者近水面,额外的兴波阻力也需要计算考虑。
本次使用CAESES与NavCad进行快速耦合计算,显示了NavCad求解的高效性和CAESES参数化功能的强大以及和设计优化的高效。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















