软件

产品


源文件:test.pcd
pcd->pts方法:
#include <iostream>#include <fstream>#include <pcl\io\pcd_io.h> typedef pcl::PointCloud<pcl::PointXYZ> PointCloud;typedef pcl::PointCloud<pcl::PointXYZ>::Ptr PointCloudPtr; void writePTS(std::string filename, PointCloudPtr cloud){ ofstream of; of.open(filename); size_t num = cloud->points.size(); if (num == 0) { } else { for (size_t i = 0; i < num; i++) { double x = cloud->points[i].x; double y = cloud->points[i].y; double z = cloud->points[i].z; string s = std::to_string(x) + " " + std::to_string(y) + " " + std::to_string(z); of << s << std::endl; } } of.close();}int main(){ PointCloudPtr cloud(new PointCloud); std::string pcdfilename = "test.pcd"; if (pcl::io::loadPCDFile(pcdfilename, *cloud) == -1) { std::cout << "Could not open pcd file " << std::endl; return -1; } std::string filestring = "D://test.pts"; writePTS(filestring, cloud); return 0;}Creo显示pts:
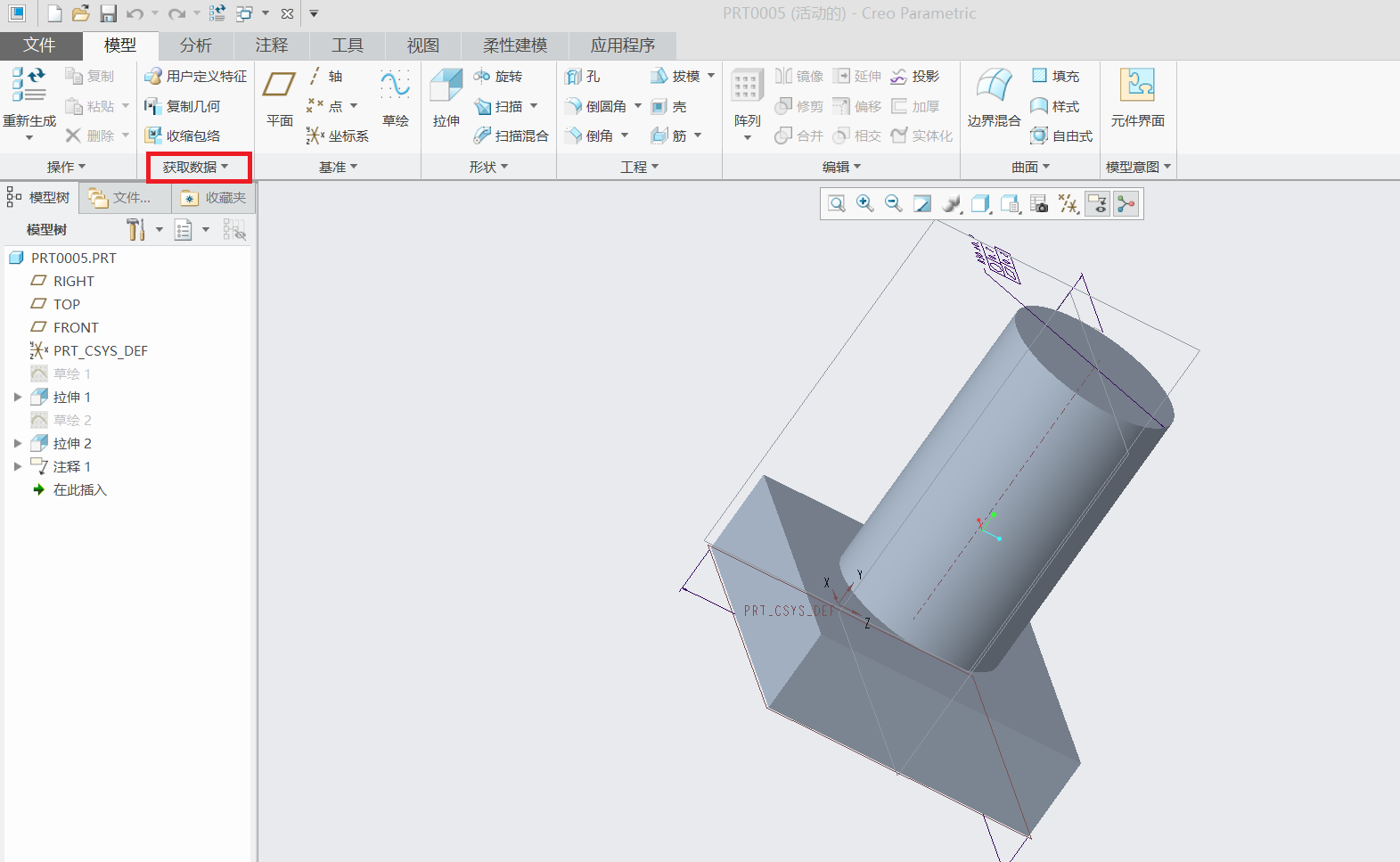
在获取数据下点击导入按钮,选中test.pts,确认即可。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020