















































软件

产品


焊接连接是工业领域上非常常见的结构连接方式,在结构设计中具有非常重要的地位,因此焊接的结构强度和疲劳强度都非常重要。ANSYS nCode DesignLife凭借其在疲劳耐久性设计领域的完备功能和易用性,成为现代企业在产品设计过程中考虑疲劳耐久性设计的首选工具。她不仅具有常规的应力疲劳(高周疲劳)、应变疲劳(低周疲劳)功能,同时还可以进行高温热-机疲劳、复合材料疲劳、振动疲劳、焊缝疲劳、点焊疲劳等功能。本文着重介绍nCode DesignLife的焊缝疲劳分析技术。

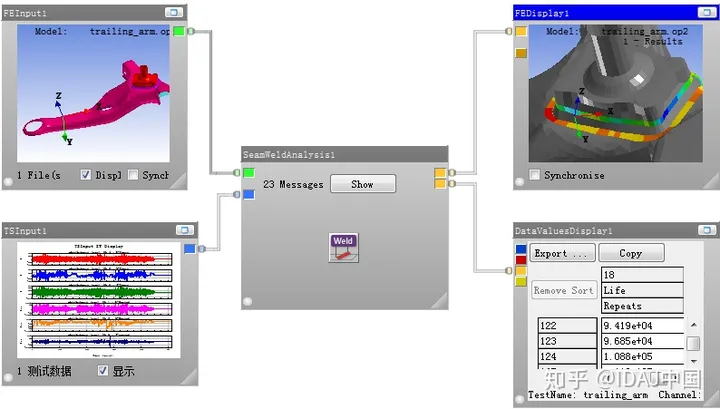
nCode DesigenLife焊缝疲劳仿真分析流程
nCode DesigenLife焊缝疲劳分析最初用于汽车行业薄板结构(1-3 mm) 的焊接分析模拟,采用薄壳搭建有限元模型,相关工业应用也都针对于此类结构进行;目前该方法也适用于以实体建模的焊缝疲劳分析。
nCode DesigenLife焊缝疲劳分析流程与标准的S-N疲劳分析流程相似,只是需要进行一些特殊的设置去处理焊缝。nCode DesigenLife焊缝疲劳分析可以采用三种结构应力法进行计算,其中Force Moment(采用节点力和力矩提取疲劳计算的应力)具有较好的网格不敏感性。
① Stress:直接采用分析的应力作为疲劳评估计算。
② ForceMoment:采用节点力和力矩提取疲劳计算的应力。
③ Displacement:采用节点位移和转动量提取疲劳计算的应力。


nCode DesigenLife焊缝疲劳分析设置不同的结构应力法
nCode DesigenLife主要分析的焊缝类型有: 角焊缝、搭接焊缝、激光搭接焊等;不同类型的焊缝形式具有不同的分析方式,需要根据焊缝种类进行分组,每一个分组对应疲劳引擎中对应的有限元焊缝类型。
对于以薄壳单元建立焊缝有限元模型具有一定的通用准则:
焊接薄板采用中面表达,网格应以4节点四边形单元为主
与焊缝相邻连接的薄板网格单元以5mm左右为好,避免三角形单元
焊缝采用一组或两组壳单元来表达,放在单独属性组(property set)中
焊缝单元的法向朝外,指向焊接者
毗邻焊缝的单元的非平均化节点应力被提取作为焊趾(weld toe)和焊根(weld root)疲劳计算评估使用,该应力也可以是平均化的或在单元边长的中点处进行计算,通过在“ANSYS Group Properties”中设置“WeldLocation = MIdElementedge”进行考虑。
焊喉(weld throat)疲劳寿命计算则采用焊缝单元中心位置应力进行(基于焊缝单元“两条焊线”计算,后平均到中心位置)。

焊缝连接有限元模型示意图
下面详细介绍一下角焊缝、搭接焊缝、激光搭接焊缝的建模细节:
1、 角焊缝:以给定角度连接薄板结构,如下图所示焊接结构失效位置在焊趾或者焊根,这是疲劳损伤将要评估的区域(对于焊喉区域也可以计算,但并不推荐)。角焊缝可采用一组或两组壳单元来建模表达:

角焊缝示意图
a) 角焊缝的截面采用一组倾斜壳单元表达
焊缝单元的法向应指向施焊人员,如图下所示。
焊缝单元节点,在表达焊趾的直线上。
焊趾尺寸Lw长度应由实际确定,推荐值为:Lw=t1+t2
焊缝单元厚度应能表达焊喉厚度,推荐值为:


采用一组壳单元创建角焊缝
b) 角焊缝的截面采用两组壳单元表达
焊缝单元厚度推荐为:

亦或定义为:


采用二组壳单元创建角焊缝
2、 搭接焊缝,也可采用一组或两组壳单元来建模表达:
a) 搭接焊缝的截面采用一组壳单元表达(有两种连接形式)
焊缝单元的法向应指向施焊人员。
Lw=t1+t2
焊缝单元厚度推荐为:较薄焊板件厚度的2倍,但不小于3mm。

采用一组壳单元创建搭接焊缝的两种方式
b) 搭接焊缝的截面采用两组壳单元表达
焊缝单元的法向应指向施焊人员。
Lw=t1+t2
焊缝单元厚度推荐为:0.27*(t1+t2)

采用二组壳单元创建搭接焊缝
3、 激光搭接焊缝:
激光搭接焊缝建模形式如下图所示
焊缝单元厚度推荐为:较厚焊板件厚度的2倍

激光搭接焊缝建模
nCode DesigenLife焊缝疲劳分析时需要进行一些特殊的设置去处理焊缝分析,通过鼠标右击“SeamWeldAnalysis Glyphs” 弹出快捷菜单——选择高级编辑“Advanced edit”进行焊缝求解设置:


高级编辑“Advanced edit”中进行焊缝求解设置
——SelectionGroupType控制焊缝组的选择;
——SolutionLocation控制求解位置
——EntityDataType控制焊缝疲劳用的应力提取方式:Stress/ForceMoment/Displacement;
——SeamWeldType设置焊缝类型
——WeldEndElemnts控制分析中是否考虑焊线端部单元
——WeldResultLocation=NodeOnElement/MidElementEdge考虑基于单元节点或者单元边长的中间点进行评估。
当EntityDataType= ForceMoment时,即采用节点力和力矩提取疲劳计算的应力,该算法对网格剖分状况不怎么敏感,也是焊缝疲劳经常使用的方法,故在这里也重点阐述一下内在的算法流程。
在介绍算法流程之前,先说明一下下面两个图的相关内容,图中所示蓝色单元表达的是焊接单元,绿色单元表达的焊趾单元。以图中单元6为例,采用节点力和力矩提取焊趾单元的应力计算之前,需要确定线力和力矩(即沿着焊趾单位长度的力和力矩);单元6上节点7的节点力和力矩按照如下进行表达:


焊接单元和焊趾单元示例

焊趾单元的局部坐标系
应力计算提取过程按照如下进行:
① 确定焊趾单元和面
② 定义局部坐标系,局部坐标系的x轴法相于单元的边,z轴是单元6的7、8节点的平均法相,相对于焊趾面方向朝上。
③ 计算各个节点总力和总力矩
节点7(由单元5和6共享)其总力和总力矩;

节点8(由单元6和7共享)其总力和总力矩;

④ 在节点处,按照边长度分配力和力矩
单元6的节点7处

单元6的节点8处

⑤ 单元6线力f和力矩m,是沿着焊趾单位长度的力和力矩。

其中:

⑥ 转换到局部坐标系进行求解
⑦ 计算垂直于焊趾的应力

⑧ 将结果写入中间(FEI)文件,用于焊缝疲劳计算。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















