















































软件

产品


在做颗粒流模拟时,常采用欧拉-拉格朗日方法,即采用欧拉方法对流场进行求解,采用朗格朗日方法对颗粒位置进行追踪。
但是,FLUENT的DPM模型中,都是基于球形颗粒的理想设定,例如
虽然DPM模型设置中存在一些限制,但是FLUENT也为用户提供了自定义功能接口,这就是UDF。
官方定义:UDF(User-defined function): C or C++ function that can be dynamically loaded with the ANSYS Fluent solver to enhance its standard features[1].
意思就是,通过C或者C++函数,动态加载到fluent求解器中,增加一些功能。它有一些特点:
UDF可以近似为一个函数,其基本运作即主函数输入参数,UDF返回参数。
[a, b, c] = func(a1, a2, a3, a4)如上例,进入函数的参数为a1,a2,,a3和a4,返回的参数为a,b和c。因此只需要经营好函数中的具体算法就行了。
天下函数,万变不离其宗。
天下自定义子程序,皆万变不离其宗。
常用的接口有如下
| 功能 | 宏 | 添加位置 |
|---|---|---|
| 边界(Boundary) | DEFINE_DPM_BC | Boundary condition |
| 体积力(Body) | DEFINE_DPM_BODY_FORCE | Discrete Phase Model |
| 曳力(Drag) | DEFINE_DPM_DRAG | Discrete Phase Model |
| 侵蚀(Erosion) | DEFINE_DPM_EROSION | Discrete Phase Model |
| 初始注入(Injection) | DEFINE_DPM_INJECTION_INIT | Set Injection Properties |
| 采样(Sampling output) | DEFINE_DPM_OUTPUT | Sample Trajectories |
| 物性(Properties) | DEFINE_DPM_PROPERTY | Create/Edit Materials |
| ... | ... | ... |
比较常用的有边界、曳力、侵蚀、采样等等。
接下来选几个具体讲一讲。
DEFINE_DPM_BC(name, tp, t, f, f_normal, dim)进入udf参数
| 类型 | 参数 | 解释 |
|---|---|---|
| symbol | name | UDF的名字 |
| Tracked_Particle | *tp | 被追踪颗粒的数据集 |
| Thread | t | 我也没懂,好在没用到 |
| face_t | f | 颗粒撞击的面的index |
| real | f_normal | 垂直面的单位向量 |
| int | dim | 维度,2D为2,3D为3 |
类型比较好理解,tp是颗粒的数据集,结构体形式,包含颗粒的所有信息,如下
TP_POS(tp)[i] /*position*/
TP_VEL(tp)[i] /*velocity*/
TP_DIAM(tp) /*diameter*/
TP_T(tp) /*temperature*/
TP_RHO(tp) /*desity*/
TP_MASS(tp) /*mass*/
TP_TIME(tp) /*time*/
TP_DT(tp) /*time step*/
TP_FLOW_RATE(tp) /*flow rate*/
TP_LMF(tp) /*liquid mass fraction*/
......f_normal非常重要,经过研究,我认为此单位向量是由颗粒指向壁面,如下图。
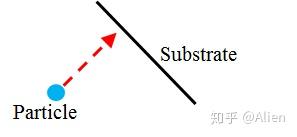
dim好理解,即维度,2D为2,3D为3。注意,2D旋转对称模型虽然是二维,但本质是3D。
返回参数
采用return返回参数,有以下类型
return PATH_ACTIVE /* Continue to track */
return PATH_ABORT /* Stopped and Aborted */
return PATH_END /* Stopped but escaped */PATH_ACTIVE 继续追踪
PATH_ABORT 终止,一般是因为错误而终止
PATH_END 停止,和abort是有本质区别的,是程序逻辑上的终止
2. 颗粒参数
TP_VEL0[dim]直接对颗粒速度进行赋值。例如
for(i=0; i<dim; i++)
TP_VEL0[i] = 1.;返回后,下次计算时颗粒的初始速度就被更改了。
FLUENT的帮助文档给了一个示例,因此我想通过示例,来解释该怎么用。
以下经过拆分,方便讲解,连在一起就是完整程序。
1. 初始定义
/* reflect boundary condition for inert particles */
#include "udf.h"
DEFINE_DPM_BC(bc_reflect,tp,t,f,f_normal,dim)
{
real alpha; /* angle of particle path with face normal */
real vn=0.;
real nor_coeff = 1.;
real tan_coeff = 0.3;
real normal[3];
int i, idim = dim;
real NV_VEC(x);例如,这里udf的名字为bc_reflect,定义了一些参数,如
2. 判断类型
#if RP_2D
/* dim is always 2 in 2D compilation. Need special treatment for 2d axisymmetric and swirl flows */
if (rp_axi_swirl)
{
real R = sqrt(TP_POS(tp)[1] * TP_POS(tp)[1] +
TP_POS(tp)[2] * TP_POS(tp)[2]);
if (R > 1.e-20)
{
idim = 3;
normal[0] = f_normal[0];
normal[1] = (f_normal[1] * TP_POS(tp)[1]) / R;
normal[2] = (f_normal[1] * TP_POS(tp)[2]) / R;
}
else
{
for (i = 0; i<idim; i++)
normal[i] = f_normal[i];
}
}
else
#endif此功能是求解法向向量。这是因为,2d旋转对称的向量是二维,但是实际其实是三维,因此需要特殊求解法向向量。
3. 具体模型
for (i = 0; i<idim; i++)
normal[i] = f_normal[i];
if (TP_TYPE(tp) == DPM_TYPE_INERT)
{
alpha = M_PI / 2. - acos(MAX(-1., MIN(1., NV_DOT(normal, TP_VEL(tp)) / MAX(NV_MAG(TP_VEL(tp)), DPM_SMALL))));
if ((NNULLP(t)) && (THREAD_TYPE(t) == THREAD_F_WALL))
F_CENTROID(x, f, t);
/* calculate the normal component, rescale its magnitude by the coefficient of restitution and subtract the change */
for (i = 0; i<idim; i++)
vn += TP_VEL(tp)[i] * normal[i]; /* Compute normal velocity. */
for (i = 0; i<idim; i++)
TP_VEL(tp)[i] -= vn*normal[i]; /* Subtract off normal velocity. */
for (i = 0; i<idim; i++)
TP_VEL(tp)[i] *= tan_coeff; /* Apply tangential coefficient of restitution. */
for (i = 0; i<idim; i++)
TP_VEL(tp)[i] -= nor_coeff*vn*normal[i]; /* Add reflected normal velocity. */
for (i = 0; i<idim; i++)
TP_VEL0(tp)[i] = TP_VEL(tp)[i]; /* Store new velocity in TP_VEL0 of particle */
return PATH_ACTIVE;
}
return PATH_ABORT;
}
第一步,不是2d旋转对称的话,f_normal就是法相向量。
第二步,求解夹角
第三步,开始修改颗粒参数啦
Compute normal velocity
/* Compute normal velocity. */
for (i = 0; i<idim; i++)
vn += TP_VEL(tp)[i] * normal[i];求解法向速度,思路是
TP_VEL(tp)[0]* normal[0] + TP_VEL(tp)[1]* normal[1] + TP_VEL(tp)[2]* normal[2]就是法向速度,因为normal是法向向量。
而且,normal是颗粒朝向平面的,所以vn一定是个非负值。
Subtract off normal velocity
/* Subtract off normal velocity. */
for (i = 0; i<idim; i++)
TP_VEL(tp)[i] -= vn*normal[i]; 是从速度TP_VEL中移除法向速度,所以是求解切向速度,思路是
vn*normal[0] + vn*normal[1] + vn*normal[2]是速度的法向分量,那么
(TP_VEL(tp)[0] - vn*normal[0]) + (TP_VEL(tp)[1] - vn*normal[1]) + (TP_VEL(tp)[2] - vn*normal[2]) 就是切向速度了。重新赋值以后,TP_VEL(tp)就只有切向分量了。
FLUENT一行代码就写清楚了,佩服佩服。
Apply tangential coefficient of restitution
/* Apply tangential coefficient of restitution. */
for (i = 0; i<idim; i++)
TP_VEL(tp)[i] *= tan_coeff; 施加切向恢复系数,思路是
TP_VEL(tp)是切向分量,那么TP_VEL(tp)*tan_coeff就是对切向分量施加恢复系数。
Add reflected normal velocity
/* Add reflected normal velocity. */
for (i = 0; i<idim; i++)
TP_VEL(tp)[i] -= nor_coeff*vn*normal[i]; 这里再切向分量基础上,又把法向加回去,且施加了法向恢复系数,思路是
nor_coeff*vn*normal[0] + nor_coeff*vn*normal[1] + nor_coeff*vn*normal[2]是法向分量,但是因为颗粒碰壁以后,速度大小不变,方向相反,所以
-nor_coeff*vn*normal[0] - nor_coeff*vn*normal[1] - nor_coeff*vn*normal[2]是颗粒反弹速度的法向分量。切向速度大小方向不变,所以
(-nor_coeff*vn*normal[0] + TP_VEL(tp)[0]) +
(-nor_coeff*vn*normal[1] + TP_VEL(tp)[1]) +
(-nor_coeff*vn*normal[2] + TP_VEL(tp)[2])就是颗粒反弹后的速度了。fluent代码一行,佩服佩服。
然后修改颗粒速度啦。
Store new velocity in TP_VEL0 of particle
/* Store new velocity in TP_VEL0 of particle */
for (i = 0; i<idim; i++)
TP_VEL0(tp)[i] = TP_VEL(tp)[i];这个比较简单。
然后让颗粒继续追踪,所以返回
return PATH_ACTIVE如果颗粒碰壁就粘附,那就不继续算了,返回
return END注意,是END不是ABORT。
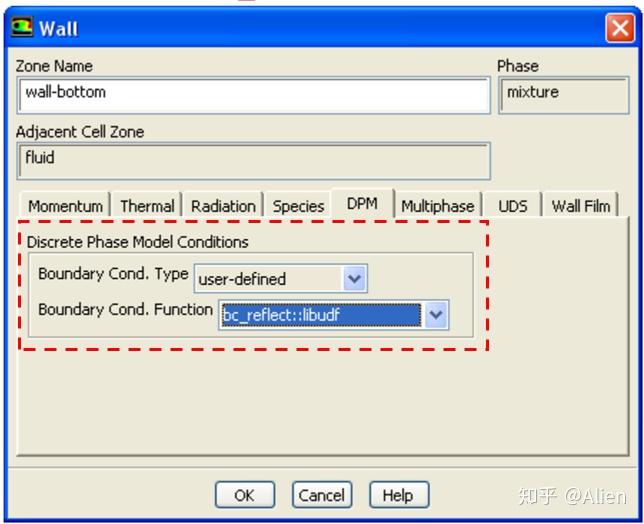
4. 如何加入UDF
UDF编写并编译成功后,在边界条件处加入UDF。
如下图,在wall选项中,DPM子选项中选择自定义函数即可。
5. 总结
这样一来,DEFINE_DPM_BC的具体功能很好理解。
如果想实现更多功能,在此基础上修改就好了,例如施加临界粘附速度。
假如临界粘附速度是vc,那么vc<vn时,颗粒粘附,vc>=vn时,颗粒反弹,程序即为
for (i = 0; i<idim; i++)
vn += TP_VEL(tp)[i] * normal[i]; /* Compute normal velocity. */
if(vn<vc)
{
return PATH_END;
}
else
{
for (i = 0; i<idim; i++)
TP_VEL(tp)[i] -= vn*normal[i]; /* Subtract off normal velocity. */
for (i = 0; i<idim; i++)
TP_VEL(tp)[i] *= tan_coeff; /* Apply tangential coefficient of restitution. */
for (i = 0; i<idim; i++)
TP_VEL(tp)[i] -= nor_coeff*vn*normal[i]; /* Add reflected normal velocity. */
for (i = 0; i<idim; i++)
TP_VEL0(tp)[i] = TP_VEL(tp)[i]; /* Store new velocity in TP_VEL0 of particle */
return PATH_ACTIVE;
}免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















