















































软件

产品


隐式动力学(Implicit)分析:
Part(零件):
轴承为深沟球轴承,包括轴承外圈、轴承内圈、保持架与滚珠(7个)。外圈、内圈与保持架的网格是在有限元前处理软件Hypermesh完成的,并选择Abaqus求解器,导出inp有限元文件,最后将inp文件导入Abaqus。以轴承为例,外圈、内圈、保持架共3个零件,在Hypermesh中处理网格时,每个零件都应定义一个Component(Hypermesh中的Component相当于Abaqus中的零件Part),即3个Component,但是导入Abaqus后软件会将这3个Component合并为一个零件Part,默认名字是Part-1。在Part的图形树中,右键Part-1,然后点击Copy,勾选Separate disconnected regions into parts,即可将Part-1中的外圈、内圈与保持架分为3个Part。因为这3个零件是从外部导入的,所以显示为绿色的网格,而滚珠网格是在Abaqus中处理的,所以滚珠有几何模型。

Property(属性):
常见的钢材,只定义线弹属性,未考虑塑性变形。

Assembly(装配):
将4个零件装配,装配后的轴承如下图所示。

Step(分析步):
共建立2个分析步,第一个分析步定义Y轴负方向的力,主要为了建立轴承内部零件的接触关系。第二个分析步定义轴承内圈的角速度,带动滚珠转动。为了增强收敛效果,初始分析步长、最小分析步长与最大分析步长尽量定义的小一点。场变量输出与历史变量输出设置默认。

Interaction(接触):
轴承的内圈内侧与保持架内侧均定义Coupling约束,便于定义边界条件与载荷。轴承的内圈为柔性约束(约束3个转动自由度)与刚性约束 (约束全部6个自由度) 两种,控制点为圆心处的RP1点,Surface为轴承内圈的内侧表面。保持架内侧为刚性约束,约束全部6个自由度,控制点为圆心处的RP2点,Surface为保持架内侧表面。RP1与RP2控制点均建立Set集合,便于选择。


三维仿真中每个滚珠需要建立3个接触,分别为滚珠与轴承外圈的接触、滚珠与轴承内圈的接触、滚珠与保持架的基础。模型中共7个滚珠,共21个接触对。为了方便选择接触对的主、从面,需要先定义Surface集合。7个滚珠、7个保持架、轴承外圈与轴承内圈共14个Surface集合。
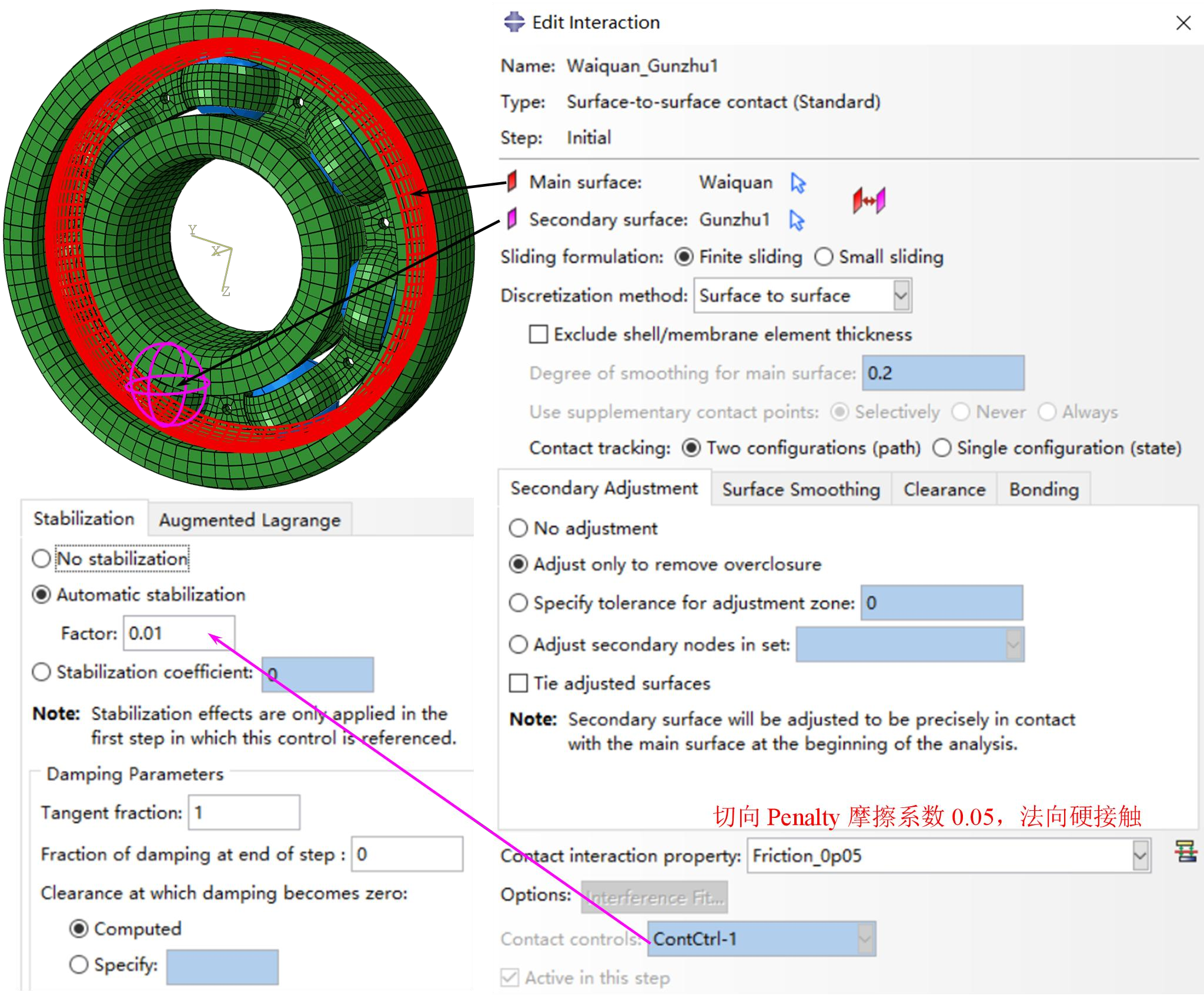
1号滚珠与轴承外圈的接触:轴承外圈为主面(红色),滚珠为从面(紫色),滑移类型为有限滑移(Finite sliding),法向硬接触,切向摩擦系数为0.05。为了增强收敛效果,定义接触控制,稳定系数为0.01(不再赘述)。由于建模误差,轴承外圈与滚珠之间有初始穿透,选择Adjust only to remove overclosure消除初始间隙(不再赘述)。
1号滚珠与轴承内圈的接触:轴承内圈为主面(红色),滚珠为从面(紫色),滑移类型为有限滑移(Finite sliding),法向硬接触,切向摩擦系数为0.05。

1号滚珠与保持架的接触:保持架为主面(红色),滚珠为从面(紫色),滑移类型为有限滑移(Finite sliding),法向软接触,切向无摩擦。

Load(边界条件与载荷):
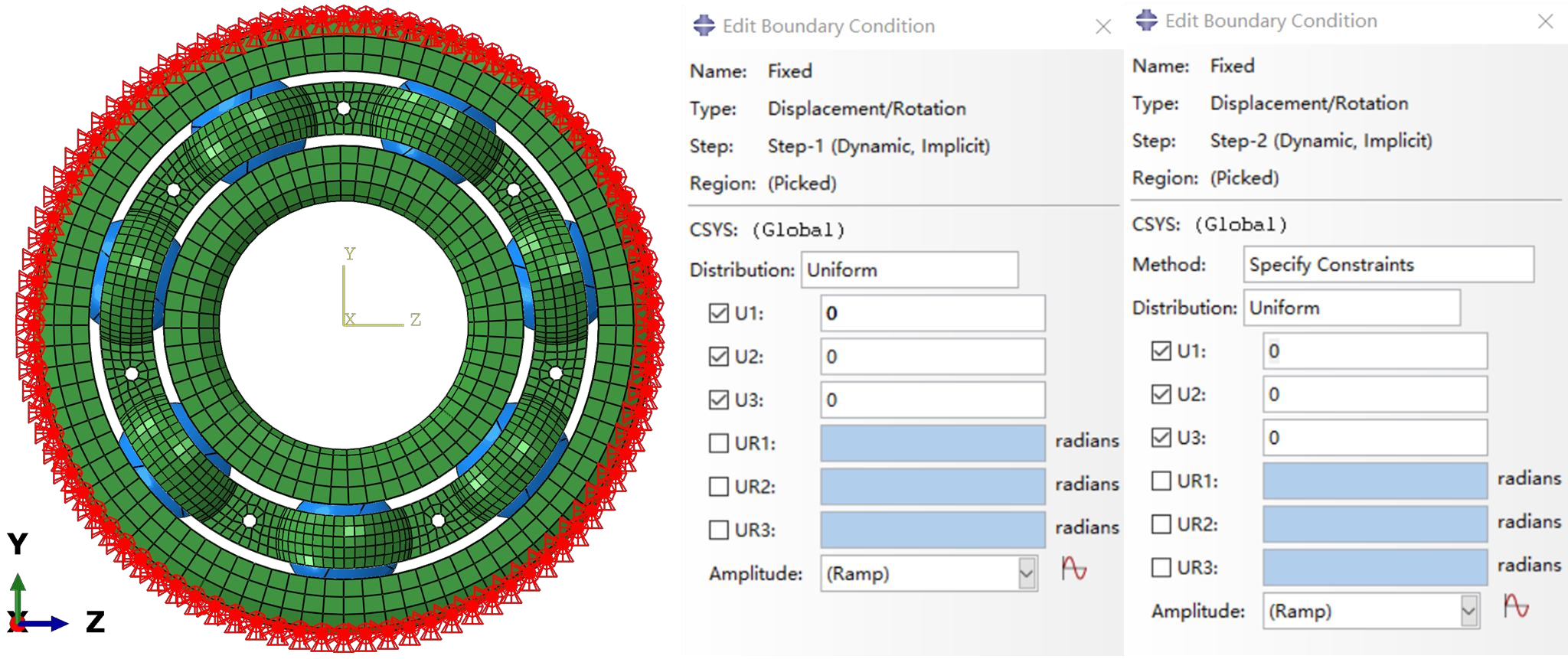
轴承外圈边界条件:直接定义在轴承外圈的网格节点上,约束1、2、3自由度(实体单元只有3个自由度)。
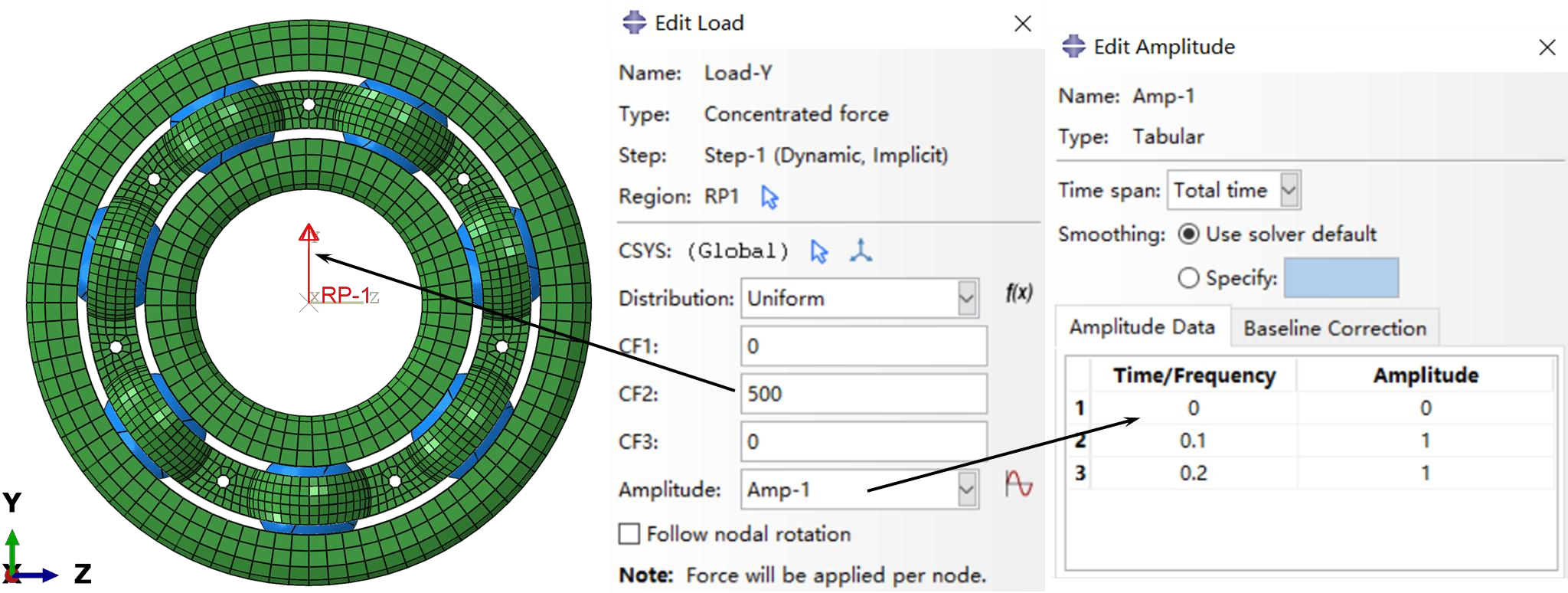
轴承内圈的力载荷:在RP1点处施加Y轴正方向500 N的力。第一个分析步0到0.1s,垂向力逐渐增加至500N,建立轴承之间的接触关系。第二个分析步0.1s到0.2s,500N的力保持不变。
轴承内圈的边界条件与速度载荷:在RP1点定义X轴的角速度104.72rad/s。第一个分析步0到0.1s,只释放2方向自由度(因为2方向定义了力载荷),其余全部约束。第二个分析步0.1s到0.2s,继续释放2方向自由度,并定义绕X轴转动的角速度104.72rad/s。

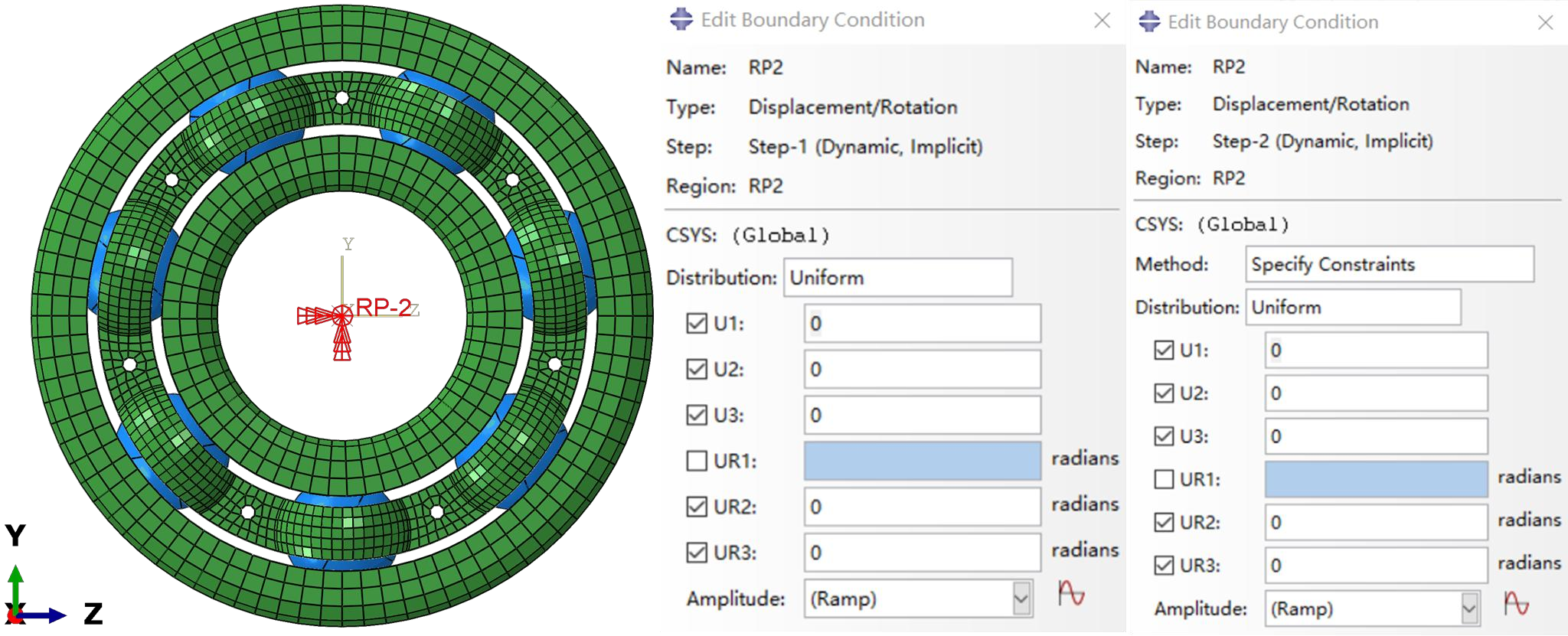
保持架的边界条件:RP2点释放4自由度 (保持架需要绕X轴转动),其余全部约束。
Mesh(网格):
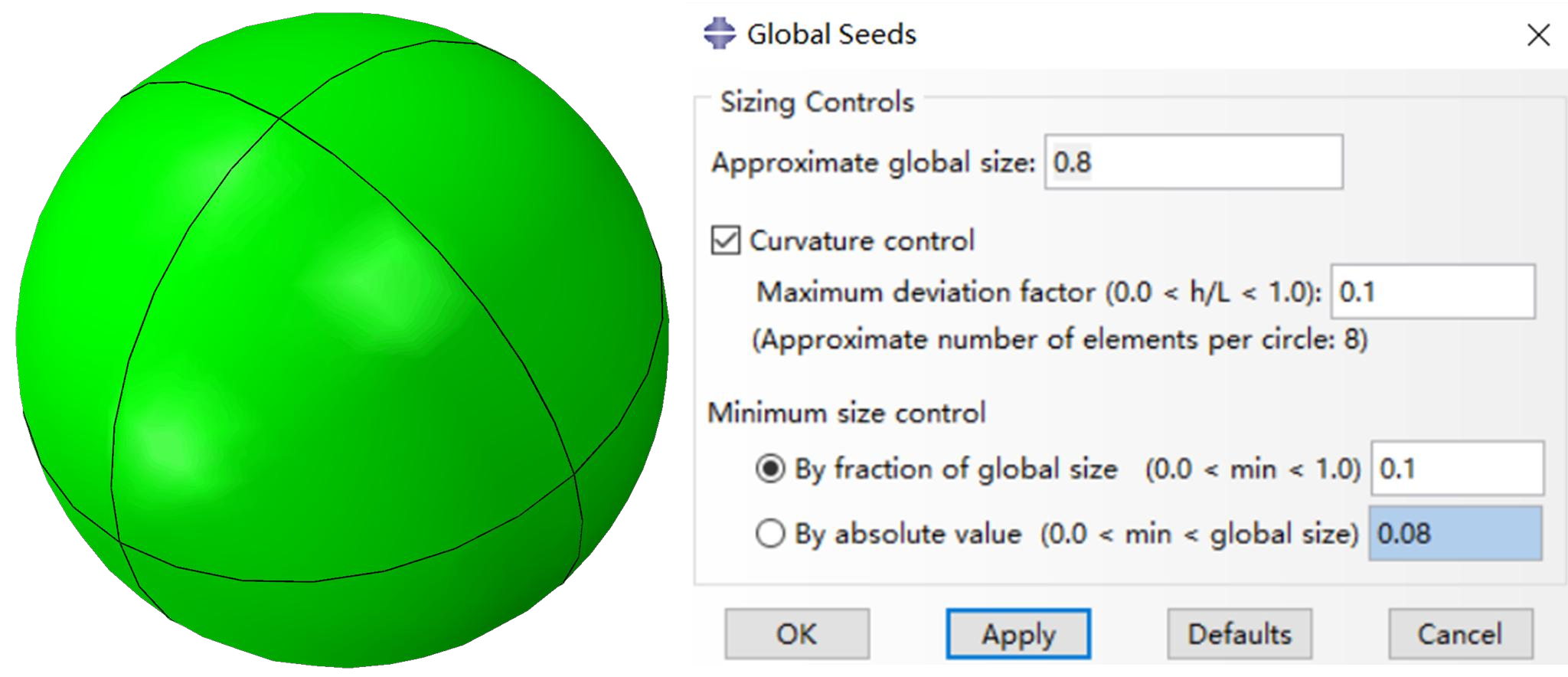
在Mesh模块,如果几何模型不规则,默认显示为橙色,此时不能直接划分六面体网格,但是可以划分四面体网格,修改网格控制(Mesh Contorl)即可。如果划分六面体网格需要切分模型,模型显示为绿色或者黄色才可以。滚珠为球体,以滚珠的圆心建立xy、xz、yz三个平面切分滚珠,此时滚珠模型为绿色,软件可划分结构网格,网格尺寸为0.8 mm。
网格类型为非协调积分单元。

Visualization(后处理):
三维仿真的隐式算法将占用大量的计算机资源,因此接触区域的网格没有加密,整体网格较为粗糙,感觉云图都是乖乖的,本案例值介绍仿真方法。

仿真动画:

免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















