















































软件

产品


1、导入 SW 模型,参见——抓手机器人轨迹规划——ADAMS学习(SW)
2、逆运动分析:
(基础操作学习推荐优酷搜索:FTC正青春——Adams从入门到提高)
(1)施加材料属性;
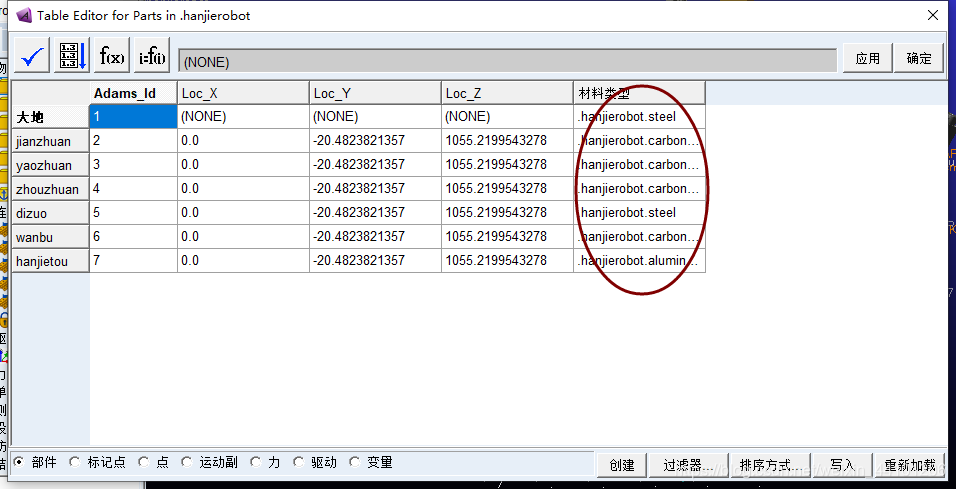
(2)施加约束:底座施加固定约束;各个关节施加旋转副;
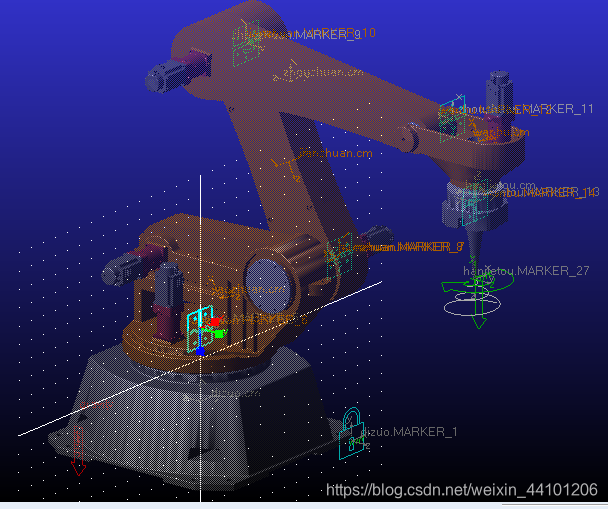
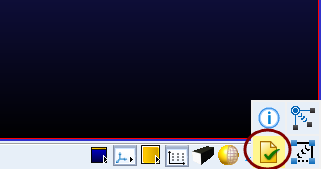
点击右下角√号,验证模型约束以及自由度正确性;
(3)在末端执行器施加Marke点 驱动 以及施加空间螺旋曲线进行轨迹规划仿真,
参见 http://www.doc88.com/p-9758238380064.html
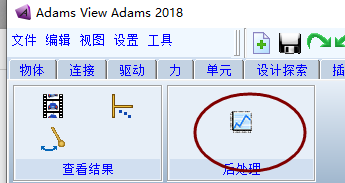
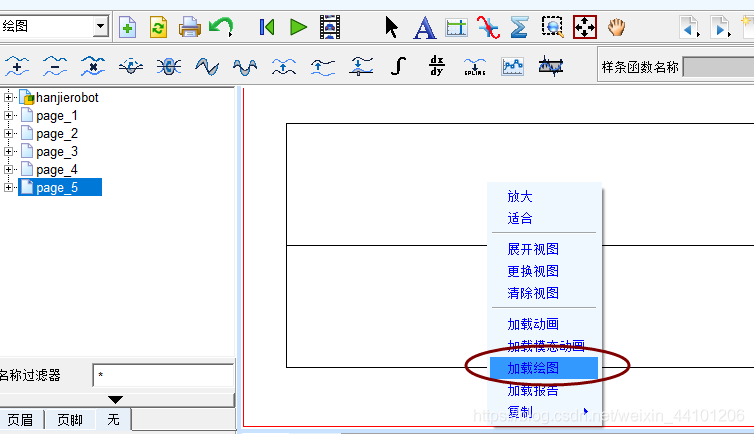
(4)后处理:点击“后处理”直接进入后处理界面
在显示窗口点击鼠标右键——加载 绘图 ;
(5)位移曲线(默认是相对于全局坐标系的变化,此时位移值变化曲线不合理):
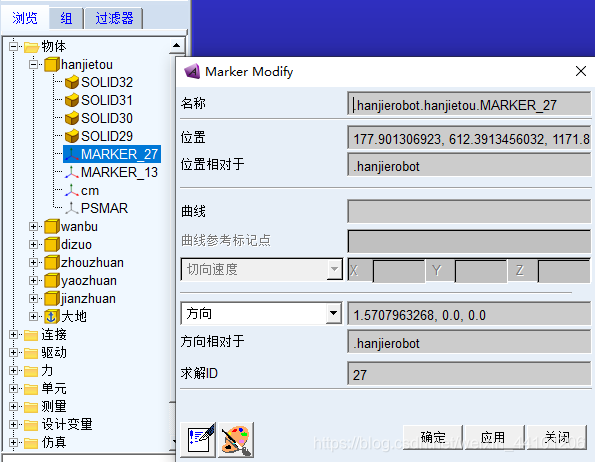
返回模型界面,找出施加点约束的marke点,点击鼠标右键——修改(modify)——位置(即坐标值);
复制坐标值;
新建一个标记点(marke点),添加到地面,随意在显示界面点击某处插入该点;
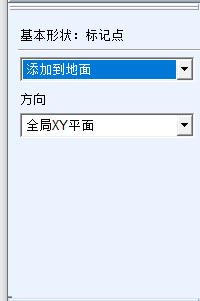
选中该点,点击鼠标右键,进行修改;
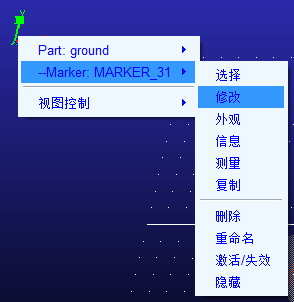
将刚才复制的点驱动坐标值粘贴到该点位置坐标处,此时该点即与施加点驱动的marke点重合;
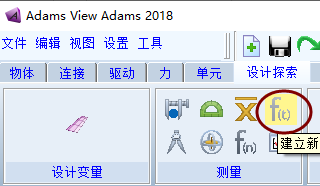
(6)选择建立新的测量函数
选择“位移”函数,选择“along x”,点击辅助,选择相应的两个标记点,修改名称,以便在后处理中方便找到,点击应用;
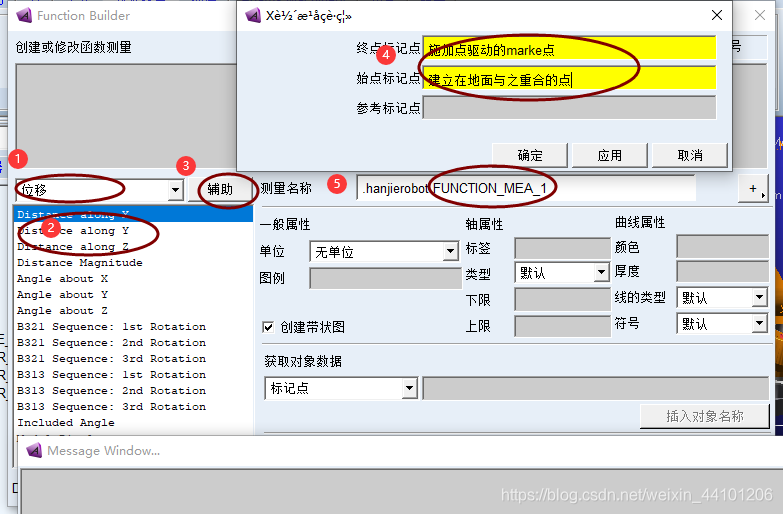
同理,依次选择“along y”、"along z"得到三个图形框,此时再次点击仿真运行,即可发现三个坐标值随着模型运动发生改变。
(7)再次进入“后处理”界面,打开刚才建立的绘图page,按如下图操作(依次将x、y、z添加曲线,使得三条曲线在同一图上)。

位移曲线图,有分析可知,该位移曲线符合末端执行器的路径。
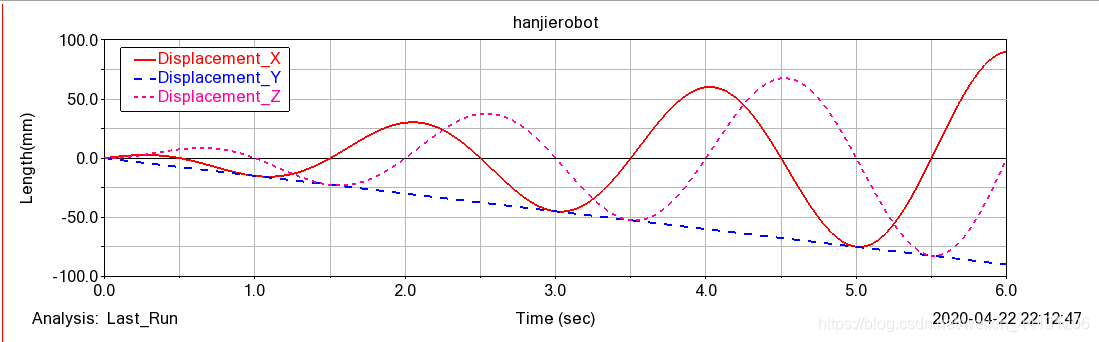
其中的纵坐标及其横坐标以及标题等大小及内容等都做修改。
。。。。。
下一节继续讲述如何得到各关节的运动输入曲线,利用Spline工具对曲线采集数据样点,作为各关节驱动的的输入参数。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















