















































软件

产品


1.3课题主要内容
1.3.1 研究目的
完成水下自主航行器的本体结构设计,搭建水下探测传感器的运行平台,进行浅水淡水域水下自主航行器本体结构的通用化、 模块化 的研究,确定在多种功能要求下的通用AUV总结构框架的最优设计。
研究水下自主航行器的整体结构设计,采用通用型的设计,方便控制、导航以及能源等模块的加入以及拓展,为日后海洋大学的水下自主航行器的结构研究提供参考样本,及其他部分的研究提供搭载平台。
1.3.2 研究内容
课题的主要研究内容为:
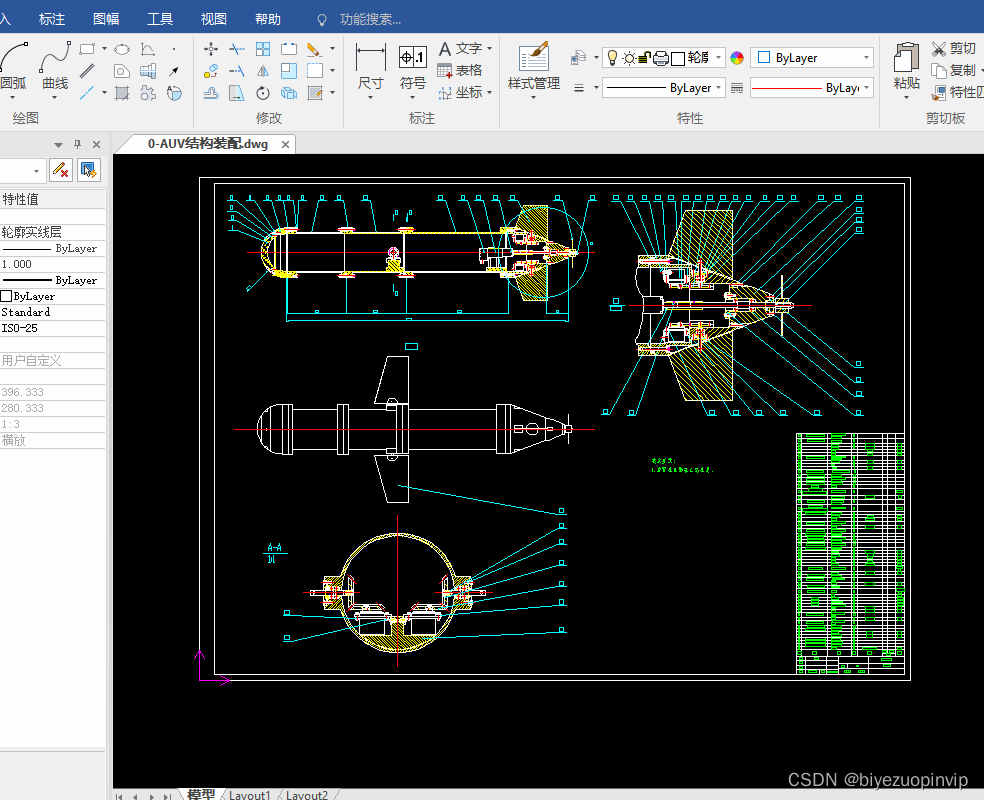
(1)AUV主体的具体几何参数设计、三维设计、仿真分析。
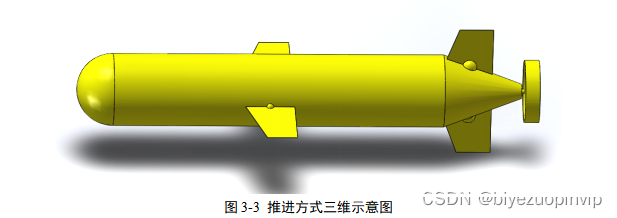
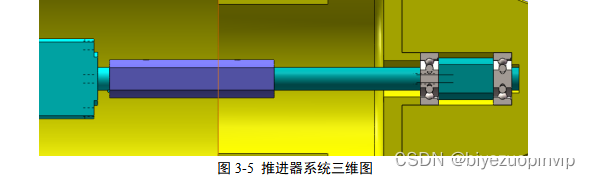
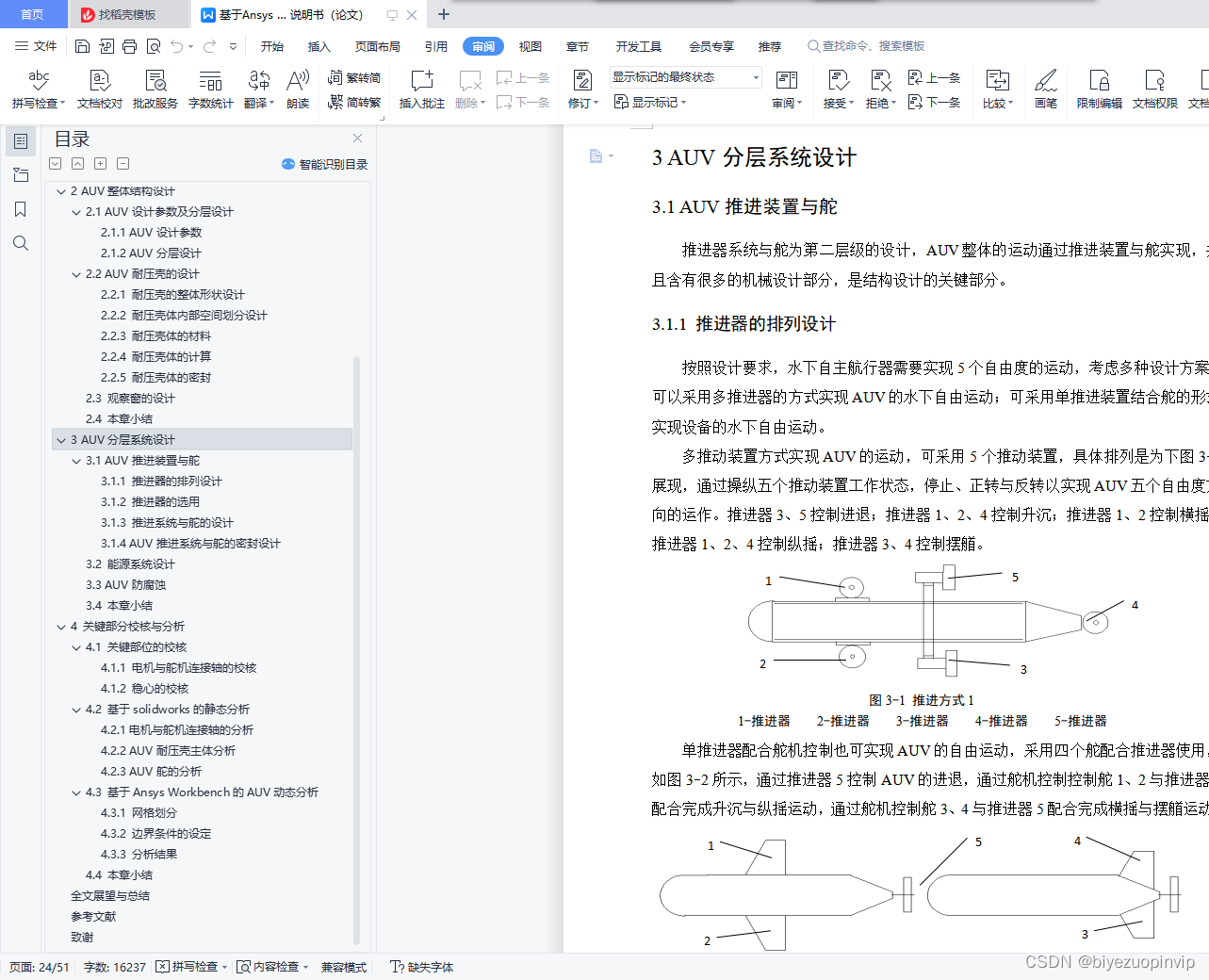
(2)AUV推进方式设计,确定动力源以及传动方式,选用相关零部件。
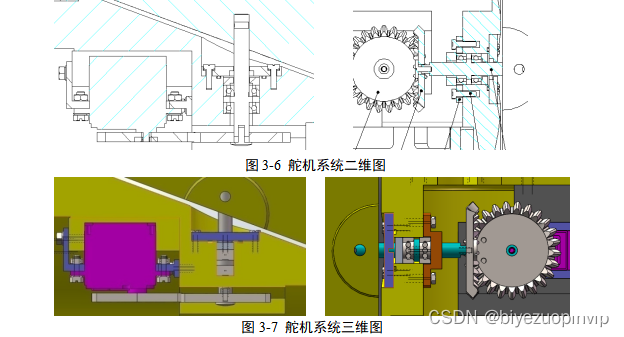
(3)AUV舵机系统设计,设计传动方式、连接方式以及AUV的运动控制方式。
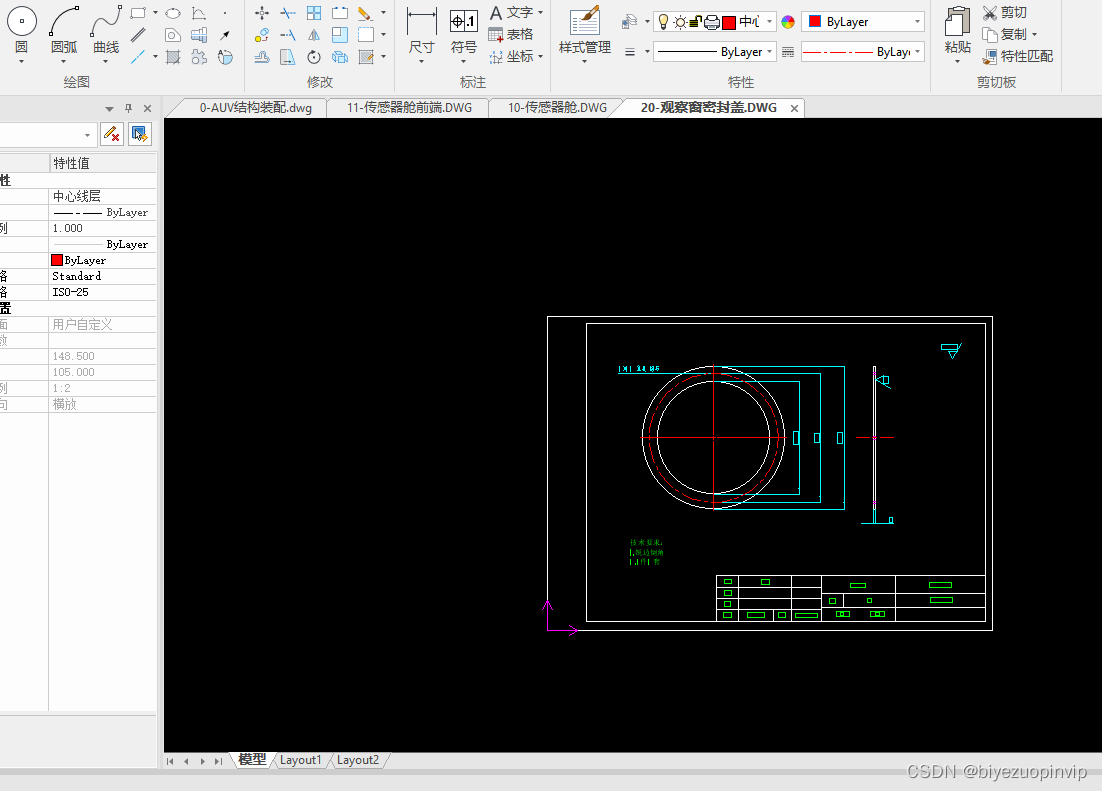
(4)AUV观察窗设计,传感器舱的设计。
(5)AUV动密封方式的研究与设计,应用于AUV主壳体连接处,以及推进系统、舵机系统与观察窗部位。
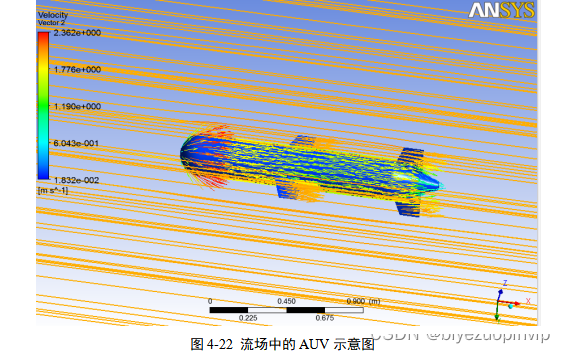
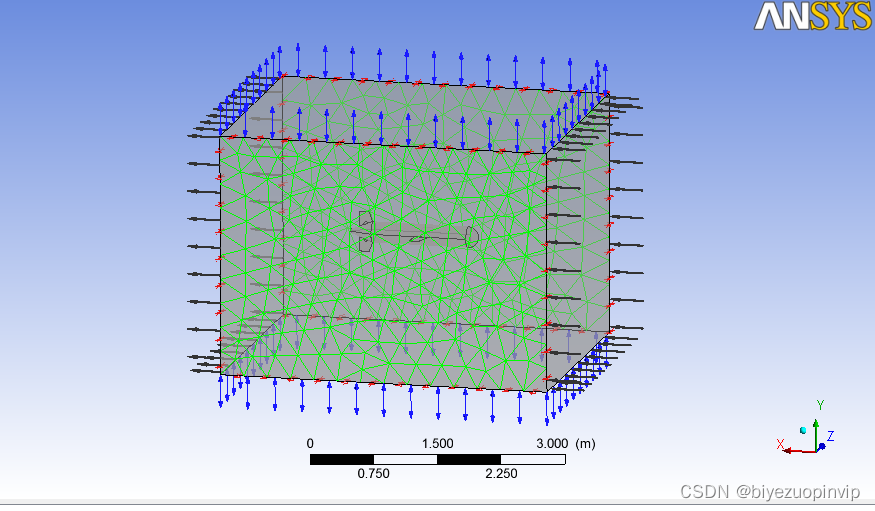
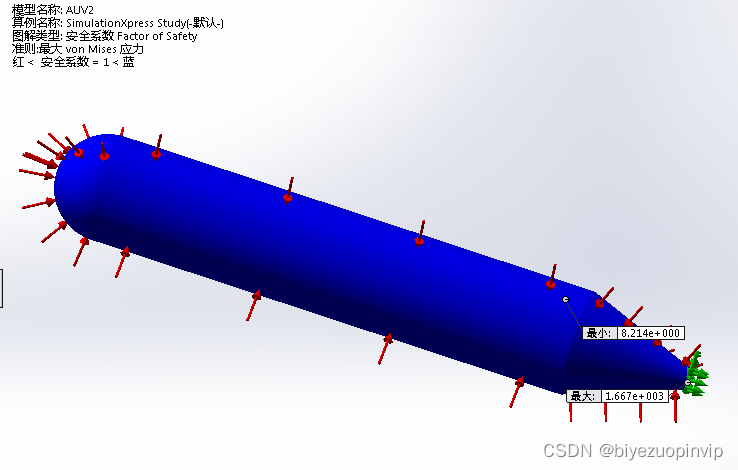
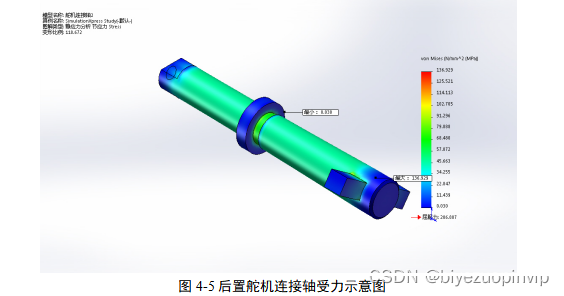
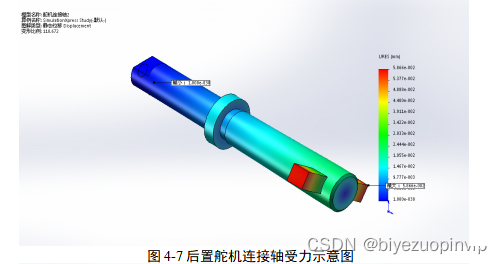
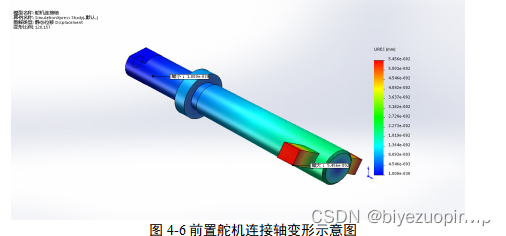
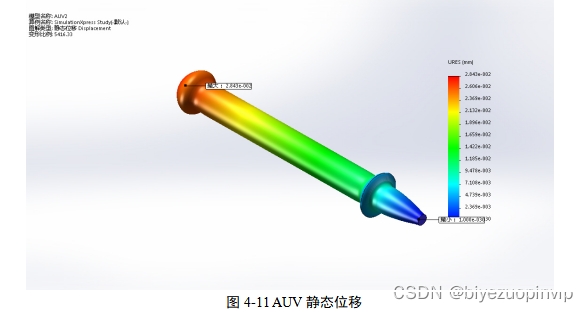
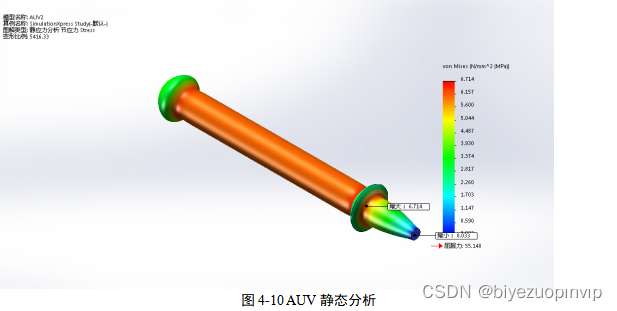
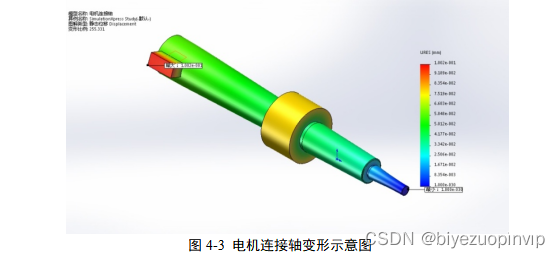
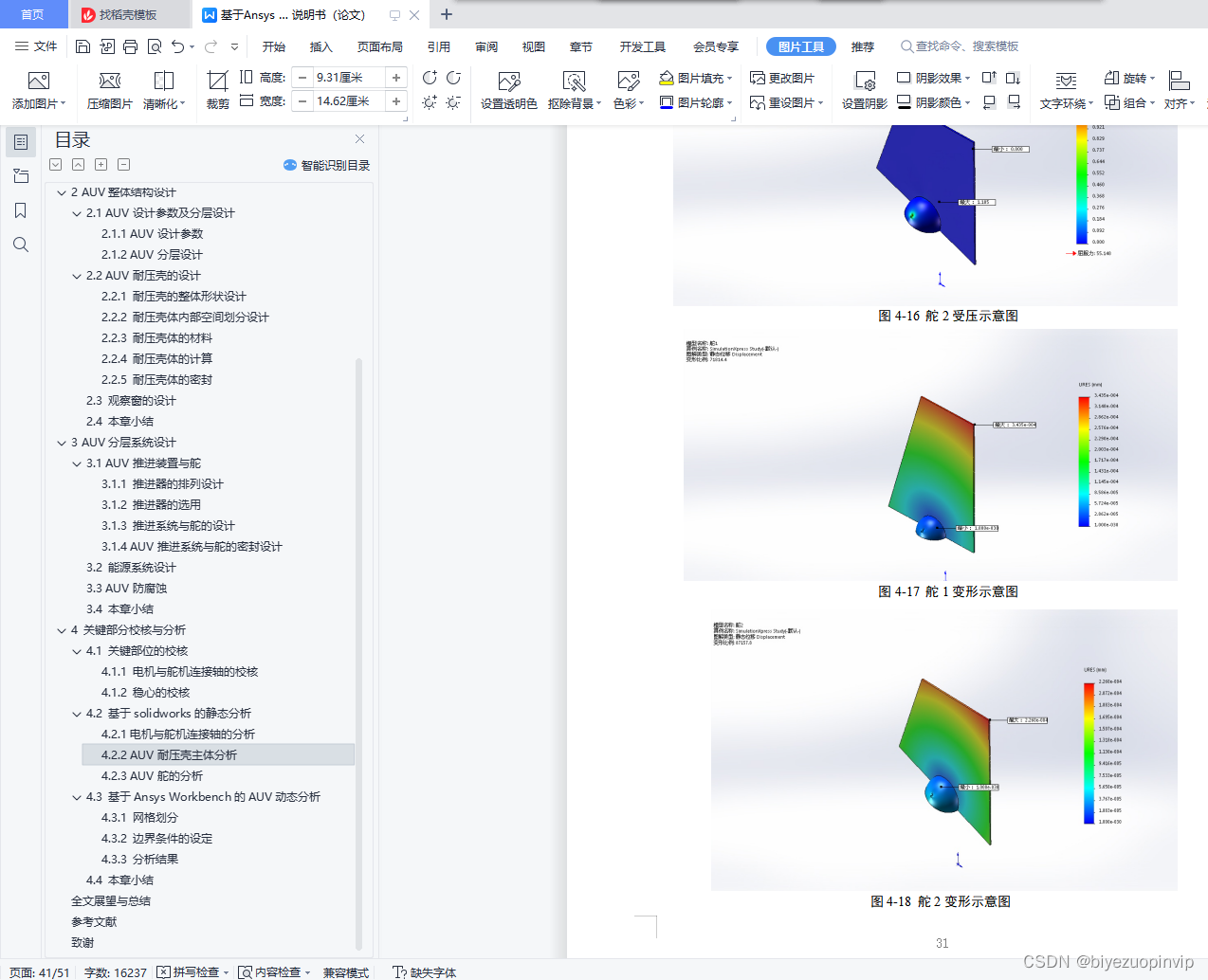
(6)关键部位的强度校核以及AUV 整体的 流体分析。
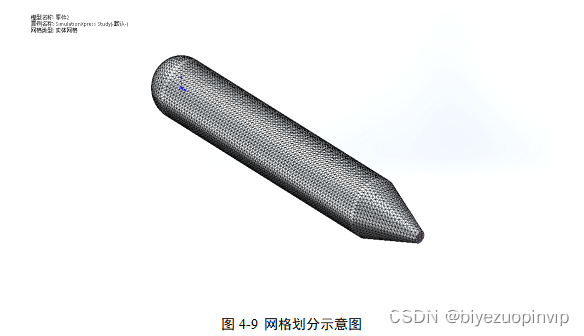
本文主要用到结构分析、流体分析以及强度校核设计等知识,因此采用理论分析与计算机仿真结合的方式研究。
1.3.3拟解决的关键问题
本课题研究水下自主航行器的结构设计,运用机械学的知识拟采取多种方案取优,并通过ansys等相关软件进行AUV的流体分析。主要设计水下自主航行器的结构,对于水下自主航行器的结构形体设计,研究外部形态设计,多重考虑水压等因素;设计内部空间划分,为水下自主航行器搭载其他系统预留空间。
拟解决的关键问题:
(1)耐压舱壁厚的优化设计。
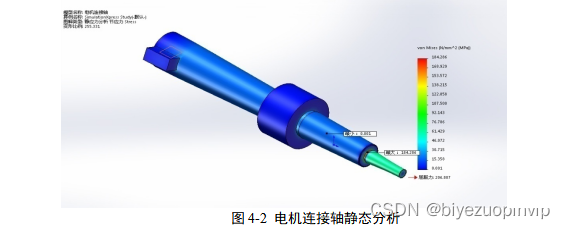
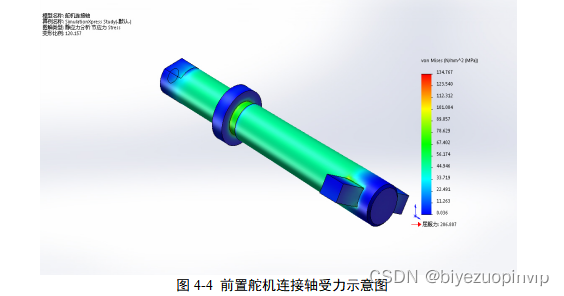
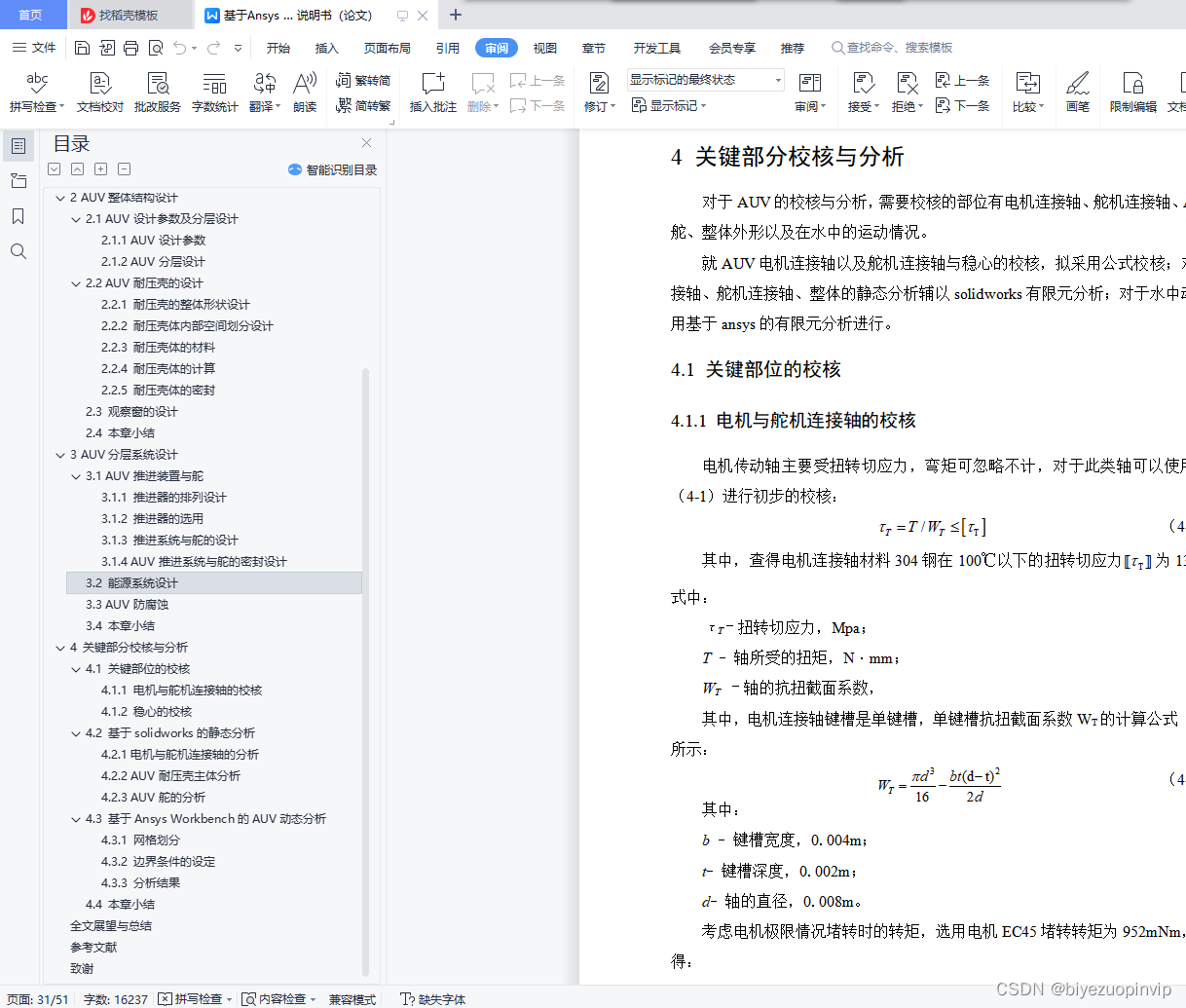
(2)关键部件的强度校核。
(3)AUV结构的通用化设计。
1.3.4 研究方法
本课题研究AUV的结构,该机器运作时具有多个系统共同工作,包括推进器系统、舵、耐压壳、 控制系统 、能源系统、导航系统、传感器系统、螺旋桨推进器,各个系统具有多种选择方案,例如推进器系统使用螺旋桨装置、喷水装置或者矢量装置等。对于AUV以具体功能为单位进行分析,合理安排设备内外空间;通过优化设计对不同方案组合选优创建本体结构模块划分与设计。利用相关软件进行强度与刚度的校核。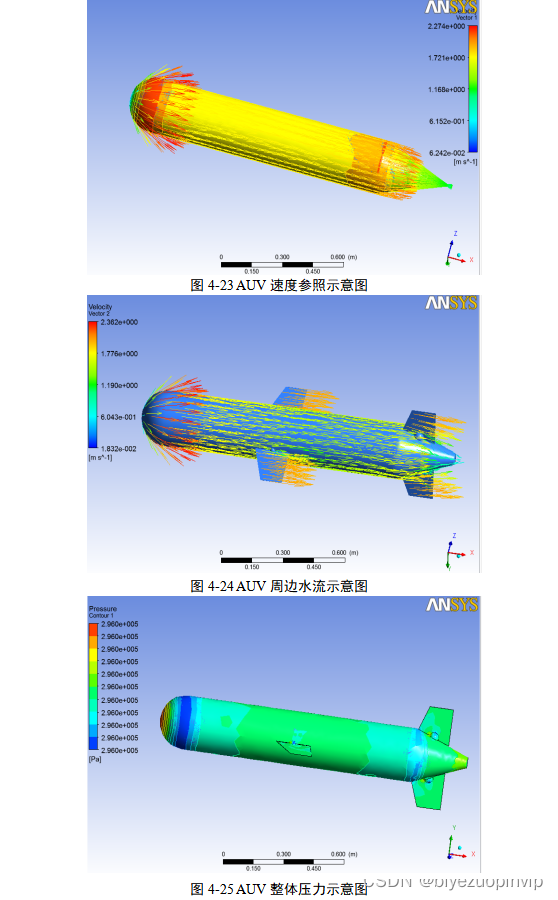

完整设计文档获取,伸手党别加!
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















