















































软件

产品


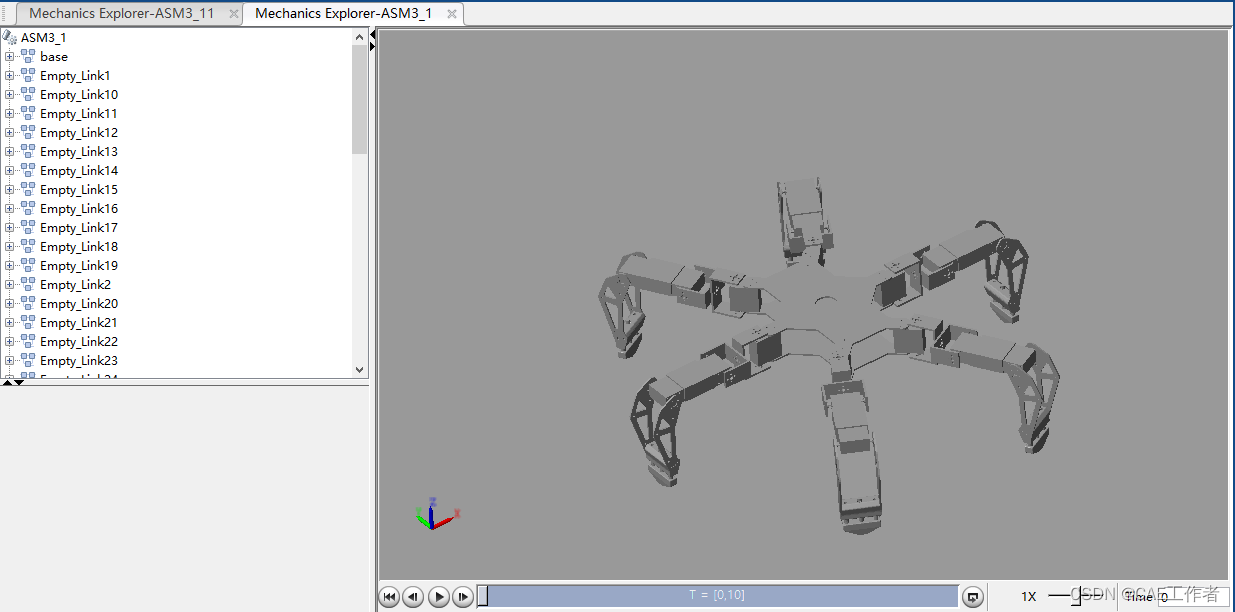
分析内容有:六角画圆,单腿画三角形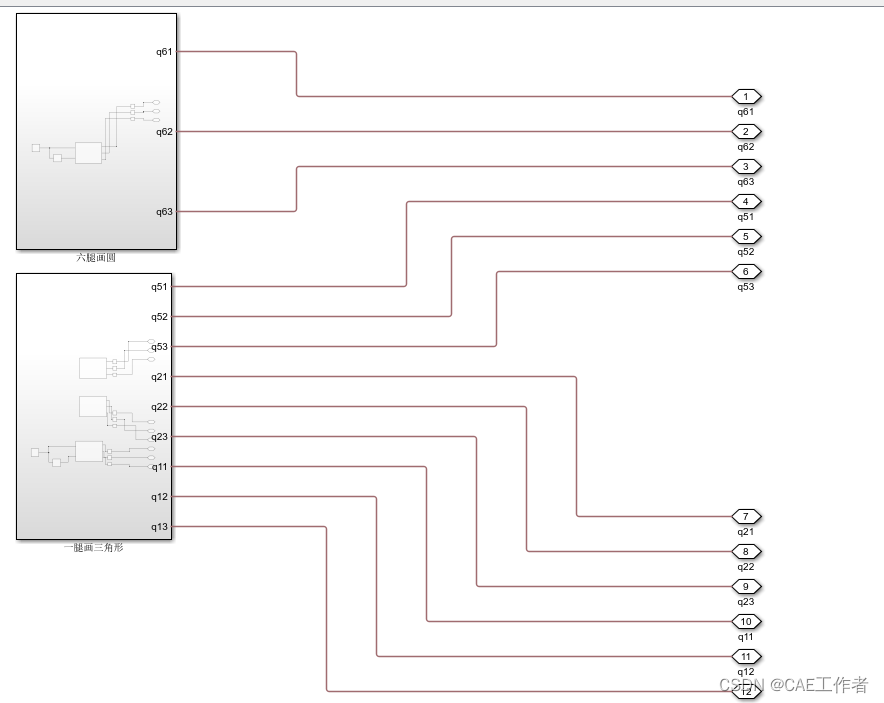
整体直行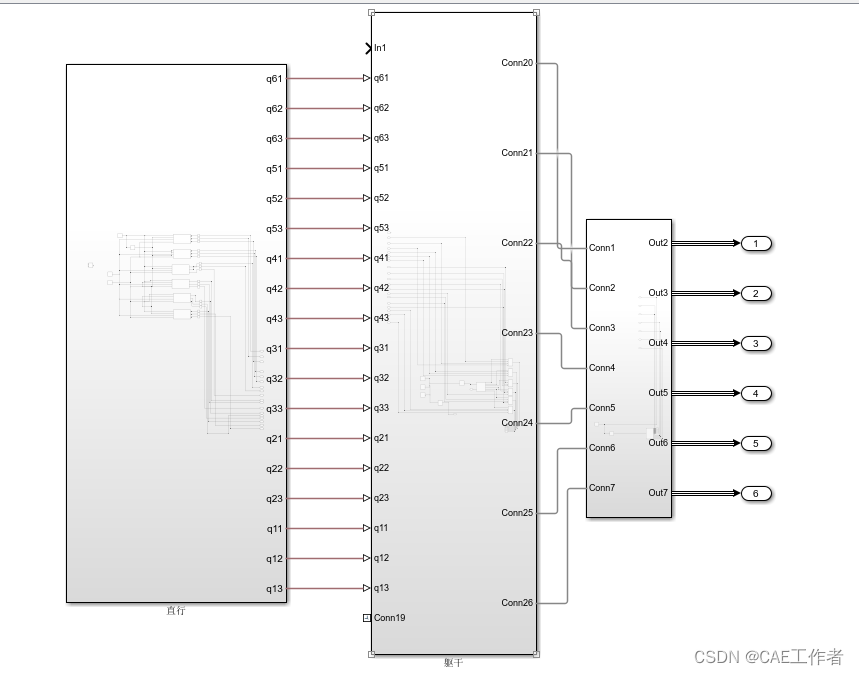
求逆 函数 代码:
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%输入腿的足尖坐标和ID号即可得到腿的三个关节角%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [q1 ,q2, q3] = ikinematics(x ,y, z, ID)
L0=1.3716;
L1 = 0.66;
L2 = 0.94;
L3 = 1.43;
if ID == 1
x0 = L0 * cos(1.0728);
y0 = L0 * sin(1.0728);
q1 = (atan(-(y-y0)/(x+x0)) - 1.0728) ;
X=x+x0+L1*
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 热门文章
热门文章






 155-2731-8020
155-2731-8020





















