















































软件

产品


1.单元名字里开始的字母标志着这种单元属于哪一个单元族。例如,S4R 中的"S"表示它是壳单元,C3D8I中的"C"表示它是实体单元,梁单元的名字以字母"B"开头。
2. ABAQUS实体单元大体可分为完全积分、减缩积分、非协调以及杂交这四种常见的单元模式。按阶次可分为一阶(线性)单元和二阶单元。
2.1 完全积分单元:单元具有规则形状(边是直线并且边与边相交成直角)时, 所用的Gauss积分点的数目足以对单元刚度矩阵中的多项式进行精确积分。
完全积分的线性单元在每一个方向上采用2个积分点;
完全积分的二次单元在每一个方向上采用3个积分点。
不足:完全积分的线性单元存在“剪切自锁”问题,原因是线性单元的边不能弯曲。在复杂应力状态下,完全积分的二次单元也有可能发生剪切自锁。
2.2 减缩积分单元:减缩积分单元比完全积分单元在每个方向上少用一个积分点。
完全积分的线性单元只在单元的中心有一个积分点
不足:线性减缩积分单元存在“沙漏模式”的数值问题,有可能过于柔软。
ABAQUS通过绘制伪应变能(ALLAE)和内能(ALLIE)来评价沙漏模式对计算结果的影响。
2.3 非协调单元:
优点:可以克服完全积分,一阶单元中的剪力自锁问题。
特点:在一阶单元中引入一个增强单元变形梯度的附加自由度。这种对变形梯度的增强允许一阶单元在单元域上对于变形梯度有一个线性变化。
不足:对单元的扭曲很敏感,在使用时必须小心以确保单元扭曲是非常小的。
2.4 杂交单元:
应用:当材料行为是不可压缩(泊松比=0.5)或非常接近于不可压缩(泊松比>0.475)时,如橡胶材料,采用杂交单元。
特点:对于具有不可压缩材料性质的任何单元,一个纯位移的数学公式是不适宜的,压应力不能由节点位移计算。杂交单元包含一个可以直接确定单元压应力的附加自由度,节点的位移场则主要用来计算偏应变和偏应力。
基于ABAQUS中如此丰富详细的实体单元划分,在使用时应尤其注意。
对于三维问题应尽量地采用六面体单元(砖型)。它们会以最低的成本给出最好的结果。当几何形状复杂时,可采用四面体单元和楔形单元。这些单元C3D4和C3D6的一阶模式是较差的单元(需要细化网格以取得较好的精度)。
某些前处理包含了自由划分网格算法,用四面体单元划分任意几何体的网格。对于小位移无接触的问题,在ABAQUS/Standard中的二次四面体单元(C3D10)能够给出合理的结果。这个单元的另一种模式是修正的二次四面体单元(C3D10M),它适用于ABAQUS/Standard和ABAQUS/Explicit,对于大变形和接触问题,这种单元是强健的,展示了很小的剪切和体积自锁。但是,无论采用何种四面体单元,所用的分析时间都长于采用等效网格的六面体单元。
下面给出了ABAQUS/Standard中应用实体单元的一些建议:
首先,除非需要模拟非常大的应变或者模拟一个复杂的、接触条件下不断变化的问题,对于一般的分析工作,应采用二次、减缩积分单元(CAX8R,C3D20R等)。
其次,在存在应力集中的局部区域,采用二次、完全积分单元(CAX8,C3D20等)。它们以最低的成本提供了应力梯度的最好解答。
然后,对于接触问题,应采用细化网格的线性、减缩积分单元或者非协调单元(CAX4I,C3D8I等)。
3.C3D8R单元:8节点六面体线性减缩积分单元。与完全积分单元相比,线性减缩积分单元仅在单元中心包含一个积分点,而二次减缩积分单元的积分点数量与线性完全积分单元的相同。
线性减缩积分单元有以下优点:
(1)在弯曲荷载下不易发生剪切自锁现象。
(2)对位移的求解结果比较精确。
(3)网格存在扭曲变形时,分析的精度不会受到太大的影响。
线性减缩积分单元也存在如下缺点:
(1) 需要划分较细的网格来克服沙漏问题。
(2) 不能用于以应力集中部位的节点应力为指标的分析,因为线性减缩积分单元只在单元的中心有一个积分点,其在积分点上的应力是相对精确的,但经过插值和平均后得到的节点应力则是不精确的。
二次减缩积分单元仍具有线性减缩积分单元的全部优点,同时还具有以下优点:
(1) 即使不划分很细的网格,也不会出现严重的沙漏问题。
(2) 即使在复杂的应力状态下,对自锁问题也不敏感。
使用二次减缩积分单元时需要注意以下问题:
(1) 不能用于接触分析。
(2) 不能用于大变形问题的分析。
(3) 与线性减缩积分单元类似,采用该单元计算得到的节点应力不够精确。
4.C3D8I单元:8节点六面体线性非协调模式单元。该单元把增强单元位移梯度的附加自由度引入线性单元,能克服剪切自锁问题,具有较高的计算精度,注意:非协调模式单元与减缩积分单元不能同时被选中。
非协调模式单元有以下优点:
(1) 能够克服剪切自锁问题,在单元扭曲较小的情况下,得到的位移应力结果比较精确。
(2) 在弯曲问题中,在厚度方向上只需较少的单元,就可得到与二次单元相当的结果,大大降低了计算成本。
(3) 使用增强变形梯度的非协调模式单元,在单元的交界处不会发生重叠或开孔,因此容易扩展到非线性、有限应变的位移。
使用该单元也需注意以下问题
(4) 如果关心区域的单元扭曲较大时,特别是出现交错扭曲时,计算的精度就会大大降低。
个人发现在计算大变形问题时,采用C3D8R单元比较容易收敛,荷载可以加5倍极限荷载标准值,便于观察结构的破坏趋势。采用C3D8I单元时,在结构刚刚达到极限荷载时,收敛就变得异常困难。
5.在Abaqus软件中,单元的构造方式不同,适用范围就不同。在选取单元类型时应综合考虑以下方面:
1)如果希望得到的是节点应力,则尽量不要选用线性减缩积分单元(例如 C3D8R);
2)如果使用线性减缩积分单元,应注意避免出现沙漏模式;
3)在定义了接触和弹塑性材料的区域,不要使用 C3D20、C3D20R、C3D10 等二次单元;
4)完全积分单元容易出现剪切闭锁和体积闭锁问题,一般情况下尽量不要使用。
5)对于 Abaqus/Standard 分析,如果能够划分四边形(Quad)或六面体(Hex)网格,建议尽量使用非协调单元(例如 C3D8I),同时要注意保证关键部位的单元形状是规则的。
6)如果无法划分六面体(Hex)网格,则应使用修正的二次四面体单元(C3D10M),它适用于接触和弹塑性问题,只是计算代价较大。
7)有些适于 Abaqus/Standard 分析的单元类型不能用于 Abaqus/Explicit 分析中(例如非协调单元)。
8) 对于不可压缩材料,应该选择杂交单元。
如果以上各个方面无法同时兼顾,可以根据所关心问题的侧重有所取舍。要判断当前的网格密度和单元类型是否合适,可以使用“网格收敛性验证”的方法,具体做法是:
首先使用当前的网格密度和单元类型进行分析;然后使用更细化的网格或其他单元类型进行分析,把两次分析的结果进行比较,如果二者相差不大(例如小于2%),说明当前的网格密度和单元类型已经足以保证分析精度了。
要得到高质量的单元网格,应注意以下问题:
1)在狭长的几何区域内,应将网格种子布置得密一些,否则容易出现形状不规则的单元。
2)在使用四边形单元(Quad)或六面体单元(Hex)划分网格时,有两种可供选择的算法:中性轴算法(medial axis)和进阶算法(advancing front)。只要网格种子布置得不是过于稀疏,使用进阶算法往往更容易得到形状规则的网格。中性轴算法更适用于几何形状规律的模型,但模型上存在虚拟拓扑时可能无法使用中性轴算法。
3)几何部件上应尽量避免出现很尖的锐角、很短的边或很小的面,这些地方的单元形状可能会很差。在做分割(partition)操作时,也应注意避免出现这样的问题,如果远离关心区域,可以进行倒圆角等技术处理。
4)划分网格后,可以在Mesh模块中点击菜单 Mesh → Verify,选择 Analysis Checks,检查可能会导致错误或警告信息的单元。
当模型的几何形状很复杂时,很难完全避免出现形状较差的单元。对于 Abaqus/Standard 分析,只要这样的单元所在的位置远离分析所关心的重要部位,一般情况下对分析结果不会有大的影响,可以不必理会。
如果想要以合理的费用得到高精度的结果,那么正确的选择单元是非常关键的。对于ABAQUS经验丰富的使用者,毫无疑问都会自己的单元选择指南来处理各种具体的应用。但是,在刚开始使用ABAQUS时,下面的指导是非常有用的。
5.1 实体单元选择
以下单元选择的建议适用于ABAQUS/Standard和ABAQUS/Explicit:
(1) 尽可能的减小网格的扭曲。使用扭曲的线性单元的粗糙网格会得到相当差的结果。
(2) 对于模拟网格扭曲过分严重的问题,应用网格细划的线性、减缩积分单元(CAX4R,CPE4R,CPS4R,C3D8R等)。
(3) 对三维问题应尽可能地采用六面体单元。它们以低的成本给出好的结果。当几何形状复杂时,采用六面体单元划分网格可能是非常困难的,因此,还需要楔形和四面体单元。这些单元(C3D4和C3D6)的一阶模式是较差的单元(需要细划网格以取得较好的精度)。
(4) 某些前处理器包含了自由划分网格算法,用四面体单元划分任意几何体的网格。对于小位移无接触的问题,在ABAQUS/Standard中的二次四面体单元(C3D10)能够给出合理的结果。这个单元的另一种模式是修正的二次四面体单元(C3D10M),它适用于ABAQUS/Standard和ABAQUS/Explicit,对于大变形和接触问题,这种单元是强健的,展示了很小的剪切和体积自锁。但是,无论采用何种四面体单元,所用的分析时间都长于采用了等效网格的六面体单元。
(5) 对于ABAQUS/Standard求解器,除非需要模拟非常大的应变或者模拟一个复杂的、接触条件不断变化的问题,对于一般的分析工作,应采用二次、减缩积分单元(CAX8R,CPE8R,CPS8R, C3D20R等)。
(6) 对于ABAQUS/Standard求解器,在存在应力集中的局部区域,采用二次、完全积分单元(CAX8, CPE8, CPS8, C3D20等)。它们以低的成本提供了应力梯度的好解答。
(7) 对于ABAQUS/Standard求解器,采用细划网格的线性、减缩积分单元或者非协调模式单元(CAX4I, CPE4I, CPS4I, C3D8I)。
5.2 壳单元的选择
(1)对于需要考虑薄膜作用或含有弯曲模式沙漏的问题以及平面弯曲的问题,当希望得到更好的解答时,可使用ABAQUS/Standard中的线性、有限薄膜应变、完全积分的四边形壳单元(S4)。
(2)线性、有限薄膜应变、减缩积分、四边形壳单元(S4R)是强健的,而且应用很广。
(3)线性、有限薄膜应变、三角形壳单元(S3/S3R)可作为通用目的的壳单元使用。因为在单元中是常应变的近似场,所以求解弯曲变形或者高应变梯度时可能需要精细的网格划分。
(4)在复合材料层合壳模型中,考虑到剪切变形的影响,采用适合于模拟厚壳问题的单元(S4, S4R, S3/S3R, S8R),并检验是否满足平截面保持平面的假定。
(5)四边形或三角形的二次壳单元用于一般的小应变薄壳是很有效的,这些单元对于剪力自锁或薄膜自锁都不敏感。
(6)对于规模非常大但公经历几何线性行为的模型,使用线性、薄壳单元(S4R5)通常比通用目的的壳单元更节约计算成本。
(7)对于包含任意的大转动和小薄膜应变的显式动态问题,小薄膜应变单元很有效。
5.3 梁单元的选择
(1)在任何包含接触的模拟中,应该使用一阶剪切变形梁单元(B21, B31)。
(2)如果横向剪切变形是非常重要的,则采用Timoshenko二阶梁单元(B22, B32)。
(3)如果结构非常刚硬或者非常柔软,在几何非线性模拟中,则应当使用ABAQUS/Standard中的杂交梁单元(B21H, B32H等)。
(4)在ABAQUS/Standard中的(Euler-Bernoulli)三次梁单元(B23,B33)模拟承受分布载荷作用的梁有很高的精度,例如动态振动分析。
(5)在ABAQUS/Standard中,模拟开口薄壁横截面的结构应该采用那些应用了开口横截面翘曲理论的梁单元(B31OS, B32OS)。
6.ABAQUS/Standard中关于Time period的设置
(1)在静态分析中,这个时间不是实际的时间,但是还是有作用的。您设置的初始增量步时间/time period等于您第一步分析的增量步大小。比如,您现在设置的time period=1,而initial time=0.1,而您定义的平滑载荷是10N的话,您第一步加载的载荷就是1N。而随后的分析中,如果连续两次增量步都一次迭代完成,增量时间就会增加50%。所以如果您对分析的问题收敛性没把握时,可以调小initial time和time period之间的比值l。
(2)如果是和时间相关的蠕变分析、动力学分析,这个时间是实际时间。所以动态分析中这个时间您需要视情况而定进行修改。
7.ABAQUS中分析步(step)、载荷增量步(load increment)、迭代步(iteration)的区分与设置
(1)分析步是用户定义的,一个分析过程的各个步骤所包含的不同的载荷和边界条件等。分析步一般包括:分析过程选项、载荷选项和输出要求选项。在每个分析步应用不同的载荷、边界条件、分析过程选项、输出要求。
(2)增量步是分析步的一部分。对于非线性问题,位移和载荷的关系是非线性的,因此无法一次完成整个分析步的求解,这时就需要将整个分析步分解为多个增量步来依次求解,沿着非线性响应的变化路径逐步得到整个分析步的最终响应。
增量步有inital、min和max三个属性值的设定。初始增量步中的荷载大小=总的荷载大小×初始增量步时间/分析步总时间。在abaqus/standard中,用户设置初始增量步大小,系统会自动选择后续增量步大小,而abaqus/explicit中,时间增量步是完全默认的,且时间增量步要小得多。
每个增量步结束时,系统都处于近似平衡状态,并可以将结果输出到数据库中,若将增量步设置输出,则称此增量步为帧(frames)。
(3)迭代步是增量步里寻求平衡解答的一次尝试。Abaqus首先根据用户指定的初始增量步大小进行迭代;缺省状态下,若在某一增量步16次迭代中仍不收敛(或者出现发散),会放弃当前增量步,并将增量步大小减小为当前增量步大小的0.25倍,重新开始迭代尝试。当获得平衡解答,即结果收敛,则迭代和增量步结束。在abaqus/explicit中不需迭代即可获得解答。
(4)设置editstep:Basic中设置分析步的时间周期timeperiod,及nlgeom几何非线性等
Increment中设置:增量步是自动还是固定;增量步的最大数目(Maximumnumberofincrement),若在最大增量步结束还没分析完成,计算仍会中止;初始增量步大小(initialincrementsize)等。
如设置分析步时间为1,最大增量步为0.1,则至少可以看到5次结果。
(5)对于复杂的模型,折减次数为五次可能不能满足需求,在Step模块下->Other菜单->General Solution Controls的Field Equations子页面进行设置,不同的场量计算均有自己的一套场控制参数。可根据自己情况进行修改。
8.分析步时间增量释义
当您选择自动时间递增时,Abaqus使用为初始递增大小输入的值开始递增。后续时间增量的大小将根据解决方案的收敛速度进行调整。此选项是默认选项。
当您选择固定时间增量时,Abaqus将在整个步骤中使用为初始增量大小输入的值。
警告:选择固定时间增量可能会导致解决方案无法收敛,不推荐使用。
a.最大增量数Maximum number of increments
Abaqus将步骤中的增量数量限制为您为最大增量数量所输入的值。如果步骤超过这个增量数,分析将停止,并将诊断信息报告给Job模块并写入消息文件。默认情况下,Abaqus/CAE将最大增量数设置为100。
b.初始增量大小Initial increment size
Abaqus使用为初始增量大小输入的值开始该步骤。
c.最小增量大小Minimum increment size
只有当您使用自动时间增量分析模型时,Abaqus才会检查最小增量大小。如果Abaqus需要比这个值更小的时间增量来达到一个收敛的解决方案,它将终止分析,向Job模块报告,并将诊断信息写入消息文件。如果不输入最小增量大小,Abaqus将使用总时间周期的10-5倍。
d.最大增量大小Maximum increment size
只有当您使用自动时间增量分析模型时,Abaqus才会检查最大增量大小。在分析过程中,Abaqus不会将增量大小增加到超过这个值。如果不指定此值,Abaqus/CAE将该值设置为总时间段的值(动态隐式过程除外,其中默认的最大增量大小取决于各种分析设置;参见配置动态隐式过程)。
9.约束,耦合的三个类型释义
耦合分成三种,运动(kinematic),连续分布(continuum distributing)和结构分布(structural distributing)。运动(kinematic)是比较“硬”的约束(是相对偶合点,所偶合的节点位置是固定的,这时节点所形成的面就是刚体了),相比之下,两个distributing允许面上各部分发生相对变形,也就是比kinematic更“软”。连续分布(continuum distributing),如果是偶合的面,这个面上的节点相对偶合点并不一定是相对固定的,但这个面总体上是被这个偶合点控制的,面上一部分向左移动,就一定会有一部分向右移动。
当必须抑制结构的特定运动模式时,运动耦合是有用的。一个应用例如可以是薄壳状结构的纯弯曲,其中横截面必须呈椭圆形但保持平面。
运动耦合(kinematic)将耦合节点的运动限制为参考节点的刚体运动,通过消除耦合节点的自由度来施加运动学约束。指定所有平移自由度后,耦合节点将跟随参考节点的刚体运动。这意味着一旦用户在耦合节点上约束位移自由度的任何组合,便无法将其他位移约束,BCs,MPCs等进一步应用于该耦合节点。当旋转自由度已在耦合节点上受到约束(类似于位移)时,也会存在此限制。
分布耦合允许对从参考点到耦合节点的负载分布进行更多控制。可以使用其他选项(而不是“完全一致”)。运动耦合则不能。
连续耦合是一种特殊类型的连接,即仅允许在耦合节点力(而不是力矩)的传递。这可以有特殊的应用。
分布耦合必须始终限制耦合节点上所有可用的平移自由度。运动耦合不是这种情况。
一旦在运动耦合的耦合节点中耦合了至少一个(或组合)自由度,就将消除所有自由度。分布耦合不是这种情况。
10.Abaqus接触问题技巧分析
在Abaqus中进行接触分析时,往往需要定义接触对,接触对的定义直接影响计算的收敛能力与计算精度,因此,接下来简单说明一下接触对定义的技巧。
Abaqus/Standard的接触对由主面(master surfer)和从面(slave surfer)构成。在模拟过程中,接触方向总是主面的法线方向,从面上的节点不会穿越主面,但主面上的节点可以穿越从面。在定义主面和从面时要注意以下问题:
10.1 主从面的定义
1)选择刚度较大的面作为主面,此处的刚度不仅要考虑材料特性,也要考虑结构刚度。刚体必须作为主面,从面则必须是柔体上的面(可以是施加了刚体约束的柔体)。
2)如果两个接触面的刚度相似,则应选择网格较粗的面为主面。
3)主从面的节点位置不要求一一对应,但如果有条件一一对应,则可得到更加精确的结果。
4)主面不能由节点构成,并且必须连续。如果相对滑动形式为有限滑移,则主面在发生接触的部位必须是光滑的(即不能有尖角)。
5)如果接触面在发生接触的部位有很大的凹角与尖角,应该将其分别定义为两个面。
6)如果为有限滑移,则整个分析过程中,尽量不要让从面节点落到主面之外,更不要落到主面的背面,否则会收敛问题。
7)一对接触面的法线方向应该相反,换言之,如果主面和从面在几何位置上没有发生重叠,则一个面的法线应指向另一个面的那一侧(对于三维实体,法向应该指向实体的外侧)。如果法线方向错误,abaqus会将其认为是过盈量很大的接触,因而,无法达到收敛。一般来说,对于柔性的三维实体,abaqus会自动选择正确的法向方向,而在使用梁单元、壳单元、膜单元,桁架单元或刚体单元来定义接触时,应仔细指定自己需要的法向方向。
10.2 滑移形式:
有限滑移要求主面是光滑的,否则会出现收敛问题。如果主面在发生接触的部位存在尖角或凹角,应该在此尖角处把主面分为两部分来分别定义。对于有单元构成的主面,Abaqus会自动进行平滑处理。
对于小滑移的接触对,Abaqus/Standard在分析的开始就确定了从面节点与主面的关系,在整个分析过程中这种接触关系不会再发生变化。
10.3 接触面间的几何尺寸位置和ADJUST参数
如果不做特别设置,Abaqus会直接根据模型尺寸位置来判断从面和主面的距离,从而确定二者的接触状态,这要求建模时模型尺寸非常精确。一般情况下,模型尺寸往往会存在误差,所以应该利用ADJUST参数来调整从面节点的初始坐标。若果从面节点与主面的距离小于这个参数,Abaqus将调整这些节点的初始坐标,使其与主面的距离为零(刚好接触)。
10.4 收敛问题
在进行接触分析时,难免的会遇到收敛问题,因此,下面主要阐述一下解决接触分析中的收敛问题的方法。分析无法达到收敛,往往是因为模型中有问题,例如存在刚体位移、过约束、接触定义不当等,这时应该查看MSG文件,然后采取相应措施。可以考虑以下方法解决收敛问题:
1)检查接触关系、边界条件和约束
检查接触面、接触参数和边界条件的定义是否正确,其中包括表面的定义,SET的定义接触类型的定义,滑移形式的定义等
2) 消除刚体位移
在静力分析中,必须对模型中所有实体都定义足够的约束条件,以保证它们在各个平移和转动自由度上都不会出现不确定的刚体位移。
3) 使用绑定约束
如果某一对接触面的接触状态对整个模型的影响不大,或者这一对接触面在整个分析过程中都是始终紧密接触的,可以考虑将它们之间的接触关系改为绑定约束,这样会消除刚体位移,并且大大减小计算接触状态所需要的迭代。
4) 正确定义绑定约束和过盈接触
如果定义了绑定约束,或使用了*CONTACT INTERFERENCE来定义过盈接触,必须让位置误差限度(ADJUST)略大于主面和从面在模型中的距离,否则这两个面之间不会建立过盈接触或绑定约束。
5) 平稳的建立接触关系
一般应首先定义一个只有很小载荷的分析步,让接触关系平稳的建立起来,然后在下一个分析步中再施加真实的载荷。这样这可大大的减小收敛的困难程度。
6) 细化网格
细化从面与主面的网格,过于粗糙的网格会使Abaqus难以确定接触关系。
7) 使用一阶单元
如果接触属性为“硬”接触,则不能使用六面体二次单元(C3D20和C3D20R),以及四面体二次单元(C3D10),而应尽可能使用六面体一阶单元。如果无法划分六面体,可使用修正的四面体二次单元(C3D10M)。
8) 避免过约束
如果节点在某个自由度上同时定义了两个以上的约束,就会出现过约束。在检查模型时,应该检查边界条件、连接单元、子模型边界和各种约束。
9) 摩擦系数
对摩擦的计算会增大收敛的难度,摩擦系数越大,就越不容易收敛。因此如果摩擦对分析结果影响不大,可直接指定摩擦系数为0。
10) 解决振颤问题
主要考虑主面足够大,保证从面节点不会滑出主面或落到主面的背面。
11) 减小初始时间增量步
如果模型中有塑性材料,或分析过程会发生很大的位移或局部变形,或施加载荷后会使接触状态发生很大的变化,则应指定较小的初始增量步。
12) 使用自动过盈接触极限(automatic overclosure tolerance)
*CONTACT CONTROLS,MASTER=主面,SLA VE=从面,automatic tolerance
CAE:interaction module,interaction-contact controls-create,选择automatic overclosure tolerance
13) 主面应足够光滑,尽盘使用解析刚性面,而不要用由单元构成的刚性面。
*SURFACE,FILLET RADIUS
对于由单元构成的刚性面,使用以下关键词。
*CONTACT PAIR,SMOOTH
14) 如果只有很少的从面节点和主面接触,则应细化接触面的网格或将接触属性设置为软接触。
15)如果模型有较长的柔性部件,并且接触压力较小,则应将接触属性设置为软接触。
11. ABAQUS-几何非线性-真应变
在abaqus中开启几何非线性(Nlgeom)后,结果中名义应变E将会变为真应变(对数应变)LE。
其中名义应变:
εnom=Δl/l0(Δl=l1−l0)
εnom=(l1−l0)/l0=l1/l0−1
两边同时+1,求对数得到真应变(对数应变):
ε=ln(1+εnom)
当Nlgeom开启后,说明结构有发生了较大应变的,在求解时计算的是即时构型而不是初始构型。刚度矩阵在求解时会变化。
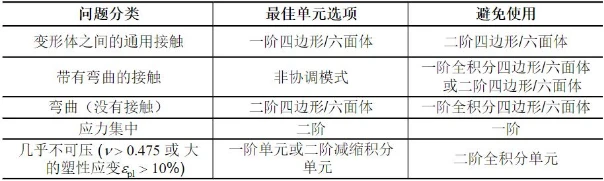
表1 单元选择参考
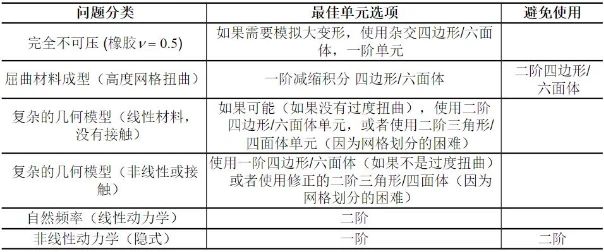
表2 单元选择参考
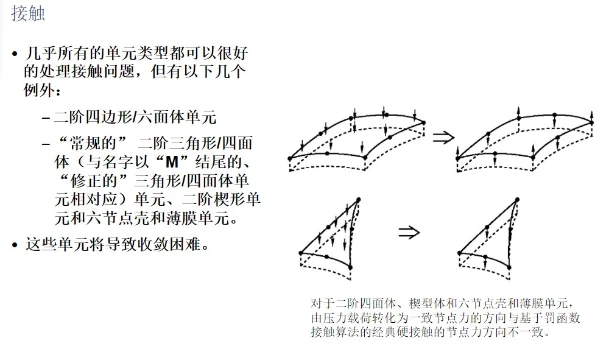
图1 接触单元选择

表3 abaqus单位制
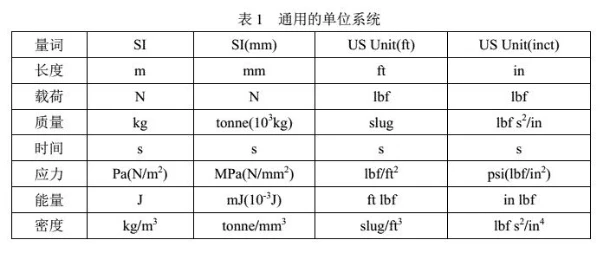
表4 abaqus单位制
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















