















































软件

产品


举个例子。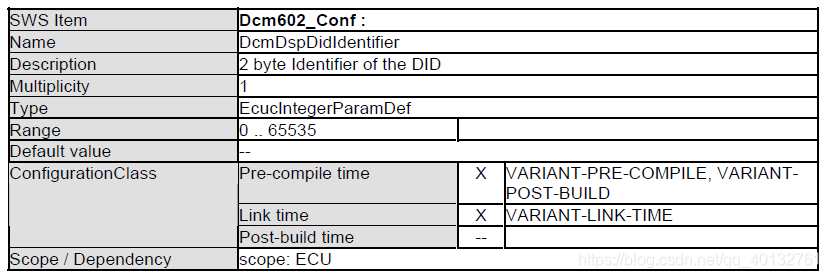
X (PDF 250页开始)
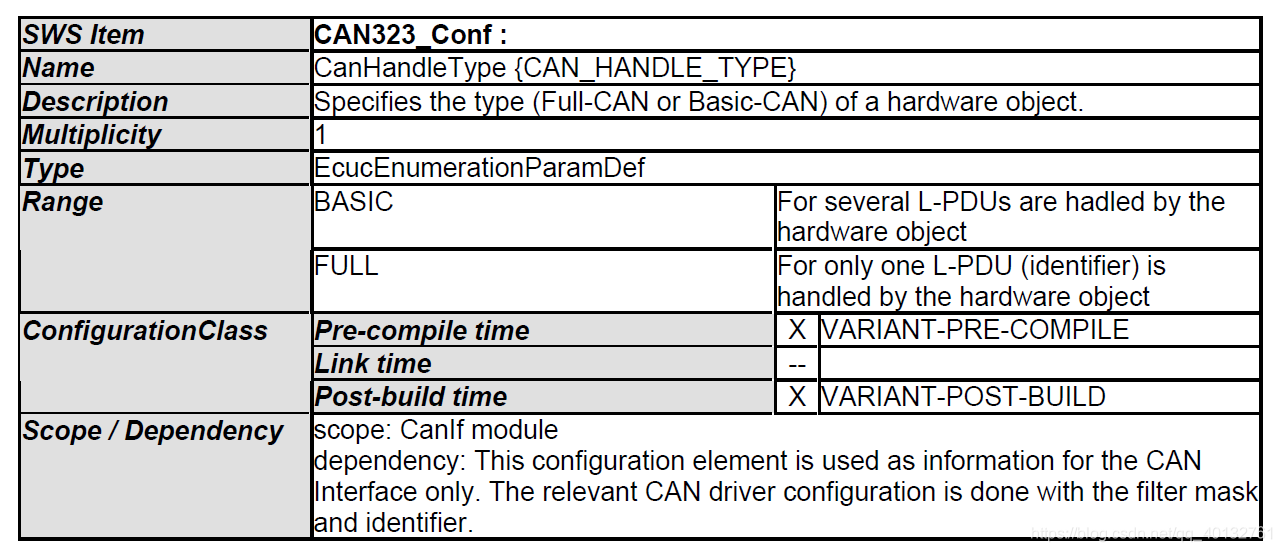
L-PDU是介于CAN Driver和CAN Interface之间的数据 协议 单元。
目前配置FULL和BASIC没有发现有什么不同,感觉都一样。后续可以接着研究。
DCM == Diagnostic Communication Manger. 主要是用来解决Service和DID的。那么DCM中主要包括哪几个功能呢?
主要是UDS基本服务。 DcmDsdServiceTable中定义了OBD_Services和UDS_Services。各个服务中支持哪些子服务。
本章节所有截图,来自:




22服务或者2E服务是怎样调用DID的呢?
解释1:通过DcmDspDid中Attributes的Dsp Did Identifier来查询的。
疑点:如何查询的,代码还是配置?
本章节所有的截图,来自:
40页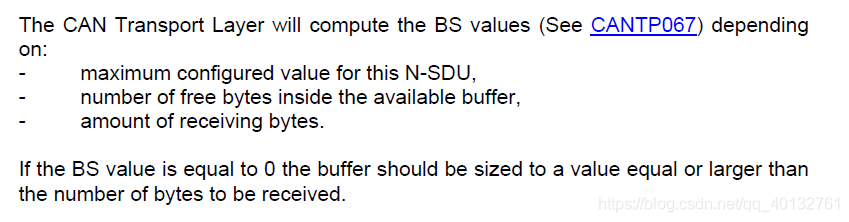
如果BS值等于0,则缓冲区的大小应等于或大于要接收的字节数。
STmin
一般不会出现在需求定义中,需要我们根据其他需求判断出来应该预留多少buffer。
Because CanTp has no buffering capability, the N-SDU payload, which is to be transmitted, is not copied internally and the N-PDU received is not reassembled internally.
因为CanTp没有缓冲能力,所以要发送的N-SDU有效载荷不会在内部复制,接收的N-PDU也不会在内部重新组装。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















