










































































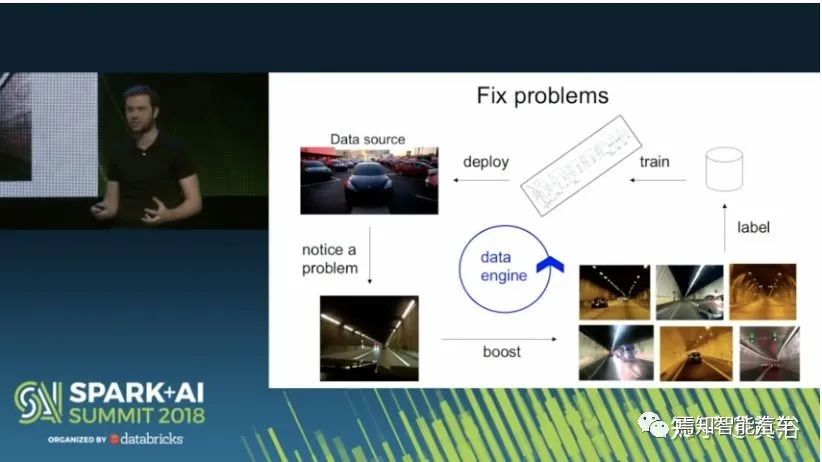
随后,2018年在Spark+AI Summit‘18,AK再次阐述了这个SW 2.0理念:





2019年AK在Pytorch DevCon‘19介绍了特斯拉的AI训练平台和多任务训练框架:主要的特点是共享主干和多头结构。










随后4月份的特斯拉Autonomy Day 2019,AK开始给投资人介绍Autopilot的核心技术:















好快2个月之后ICML‘19,AK给了一个大会报告,这次他阐述的更加清楚MTL在特斯拉应用的具体方法,并且引用了两篇斯坦福大学论文作为佐证:







时间来到了2020年,这时候的特斯拉已经是全球市值最大的车企。AK参加了在谷歌门口MV computer museum举办的Scaled ML conference‘20:



























两个月之后的8月19日,我们看到,特斯拉在AI day曝露了更多的技术路线和工作demo:


























































 技术文档
技术文档
 推荐好文
推荐好文







 155-2731-8020
155-2731-8020