编辑推荐:文章根据与神经脉冲传递相关的生物电产生机制以及触觉产生与动作电位的关系提出了一种可修复的集智能皮肤和自供电功能于一体的仿生皮肤片段,它可以模拟神经递质的释放和接收机制利用阴离子选择性凝胶和阳离子选择性凝胶控制可交换性阴离子和阳离子产生跨膜电位、静息电流和动作电流,这种智能可修复的自供电仿生皮肤片段可以保证下一代神经集成软体工程系统的同步信号传输。
众所周知,当神经脉冲到达突触前膜时,突触囊泡释放神经递质进入突触间隙。然后,神经递质与突触后膜受体蛋白的结合会刺激膜电位的变化。因此,受刺激神经纤维的局部电位分别为内部负电位和外部正电位,而相邻神经纤维的局部电位则相反。因此,在它们之间形成电流电路。这些电流会改变邻近神经膜的通透性,产生动作电位。这种作用反复进行,使神经冲动从一个地方转移到另一个地方,并能在皮肤上产生触觉。
受此启发,复旦大学郭睿倩教授课题组模仿这一机制,根据动作电流和静息电流的变化,制造了一种可修复的集智能皮肤和自供电功能于一体的仿生皮肤片段,它可以模拟神经递质的释放和接收机制利用阴离子选择性凝胶和阳离子选择性凝胶控制可交换性阴离子和阳离子产生跨膜电位、静息电流和动作电流。相关论文以题为“Investigating the Electrochemical Performance of Smart Self-Powered Bionic Skin Fragment Based on Bioelectricity Generation”发表在ADVANCED MATERIALS TECHNOLOGIES。
https://onlinelibrary.wiley.com/doi/10.1002/admt.202000848

作者提出了一种可修复的集智能皮肤和自供电功能于一体的仿生皮肤片段。如图1所示,当神经脉冲到达突触前膜时,突触囊泡释放神经递质进入突触间隙。然后,神经递质与突触后膜受体蛋白的结合会刺激膜电位的变化。因此,受刺激神经纤维的局部电位分别为内部负电位和外部正电位,而相邻神经纤维的局部电位则相反。因此,在它们之间形成电流电路。这些电流会改变邻近神经膜的通透性,产生动作电位。这种作用反复进行,使神经冲动从一个地方转移到另一个地方,并能在皮肤上产生触觉。文章模仿这一机制,根据动作电流和静息电流的变化,制造了一种智能的自供电仿生皮肤片段。
 图1 自供电仿生皮肤片段的设计原理示意图。
图1 自供电仿生皮肤片段的设计原理示意图。
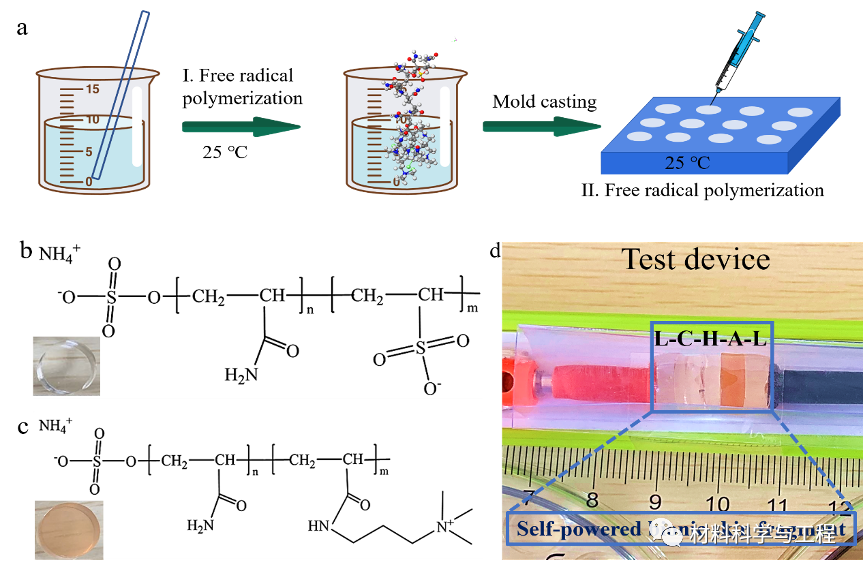
图2(a)自供电仿生皮肤片段的材料合成。(b)C凝胶的照片和链增长反应后的化学式。(c)A凝胶的照片和链增长反应后的化学式。(d)自供电仿生皮肤片段照片及电信号测试装置。
如图2a所示,所有凝胶在25℃下通过自由基聚合法制备。链增长反应后的阳离子选择性凝胶和阴离子选择性凝胶的图片和组成分别如图2b和图2c所示。这种智能自供电仿生皮肤片段由四种凝胶组成,即阳离子选择凝胶、阴离子选择凝胶、高盐度凝胶和低盐度凝胶,分别表示为C、A、H、L(如图2d),具有可修复的L凝胶外层的L-C-H-A-L凝胶阵列可以作为一种智能的自供电仿生皮肤片段,它主要通过控制离子交换形成动作电流和静息电流。
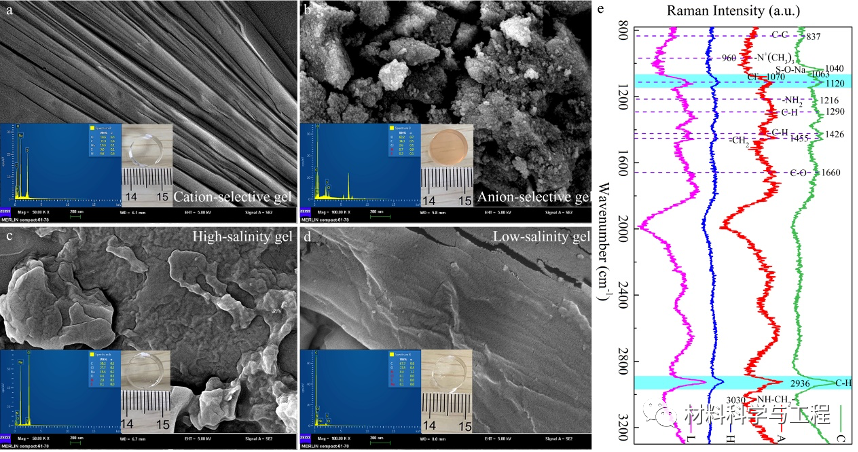
图3(a)C凝胶、(b)A凝胶、(C)H凝胶和(d)L凝胶的SEM图像、EDS光谱和照片。(e)C凝胶、A凝胶、H凝胶和L凝胶的拉曼光谱。
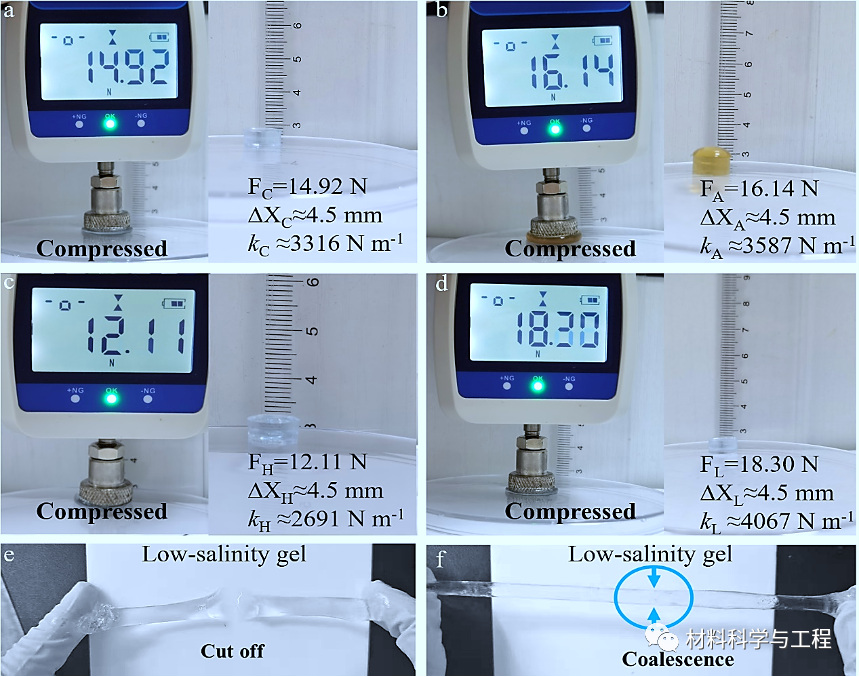
图4 C凝胶(a)、A凝胶(b)、H凝胶(C)和L凝胶(d)的弹性。(e-f)L凝胶的可修复性。
如图 3 所示,凝胶的共同特征分别出现在 837 cm -1 ( C-C )、 1120 cm -1 (主要是 C-C )、 1290 cm -1 ( C-H )、 1426 cm -1 ( C-H )、 1455 cm -1 ( -CH 2 )和 2936 cm -1 ( C-H )。 2936 cm -1 处的 -CH 2 拉伸模式被认为是 C 、 A 、 H 和 L 凝胶的特征基团,在 960 cm -1 ( -N + (CH 3 ) 3 )、 1070 cm -1 ( Cl - )和 3030 cm -1 ( -N-H-CH 2 - )区域观察到的峰是 A 凝胶的特征, 1063 cm -1 和 1040 cm -1 处的峰源自 O=S=O 和 S-O-Na ,这被认为是 C 凝胶的特征基团。通过对 C 、 A 、 H 和 L 凝胶的弹性进行研究,在相同的形变条件下, L 凝胶上的压力最大,且凝胶的弹性劲度系数 k L >k A >k C >k H 。在修复性测试中,用刀将 L 凝胶切成两部分,将切口对齐并挤压 10 秒钟,然后拉伸连接的 L 凝胶。结果表明, L 凝胶拉伸一段后不会断裂。因此将 L 凝胶作为仿生皮肤的外层,制备的智能自供电仿生皮肤片段具有出色的柔韧性和可修复的外表面。

图5智能自供电仿生皮肤片段0~25000秒的电流-电压-电阻-时间关系表示为电流-时间关系(a)、电流振荡关系(b)、电压-时间关系(c)和电阻-时间关系(d)。(e)智能自供电仿生皮肤片段电化学机理示意图。
如图 5 所示,在最初的 383.8 秒内(图 5c ), A 和 C 凝胶中的水渗透到 H 和 L 凝胶中,加速了 A 和 C 凝胶侧面附近 NaCl 盐的电离。由于阴离子选择凝胶(阳离子基团: -NH 4 Cl )和阳离子选择凝胶(阴离子基团: -SO 3 Na )中离子选择基团电负性的不同,当 H 凝胶与 C 凝胶接触时, Cl - 离子会聚集在 H 凝胶的外侧,导致 H 凝胶外侧电位较低。此外,当 H 凝胶与 A 凝胶接触时, Na + 离子会聚集在 H 凝胶的外侧,使 H 凝胶的外侧显示高电位。然而,从 383.8 秒到 2129.4 秒,由于 H 凝胶中 Na + 和 Cl - 离子的浓度远远高于 A 和 C 凝胶, H 凝胶中的 Na + 和 Cl - 离子会分别扩散到 A 和 C 凝胶中,导致 H 凝胶中形成的电位( : )与 L 凝胶中形成的电位( : 和)相反,如图 5e 所示。因此,在此期间,总电压()将下降。之后,这种现象将减弱,总电压将继续上升。如图 5d 所示,可以看到电阻变化的时间段迟于电压变化的时间段,这主要是因为电阻变化受电压和电流变化的控制,这种约束关系可用电导率来描述。以上分析可基于道南平衡理论进行定性分析。
为了更明显地反映压力和温度变化对电流的影响,文章分别对智能自供电仿生皮肤片段进行了压力刺激和热敷的连续测试过程。从图中可以看出压力的突然变化会产生动作电流的突然变化,其影响非常明显,如图 6b 所示。在施加压力的方向垂直于自供电仿生皮肤片段的变形方向的基础上,研究人员构建了直角三角形模型来解释这种变化的相关性(图 6b-c )。如图 6c 所示,压力( F A 、 F B 和 F C )和电流变化( ∆I A 、 ∆I B 和 ∆I C )的这些模型意味着动作电流的变化与加压过程中的压力变化大致成比例,这种线性响应关系具有可编程的特点,有利于其在智能设备中的应用。此外,由于热传导特性的存在,温度的突然变化会引起动作电流的连续变化,二阶温度响应特性可用于未来温度变化的智能识别。

图6智能自供电仿生皮肤片段动作电流对压力和温度变化的响应。仪器每0.15秒采集一次数据。(a)动作电流与压力和温度变化的关系。(b)压力和电流变化的关系。分别在A、B和C点施加三次压力。(c)压力和电流变化的直角三角形模型。(d)温度变化和电流变化的关系。分别在D点、E点和F点进行三次热敷。
总的来说,文章提出了一种可修复的L-C-H-A-L智能自供电仿生皮肤片段,自供电电流相对稳定,为0.5μA,持续时间近2.2小时,利用阴离子选择性凝胶和阳离子选择性凝胶控制可交换的阴离子和阳离子,实现静息电流和动作电流的变化,从而实现对外界的智能感知。此外,工作电流的变化与压力的变化近似成正比。这种线性响应关系具有可编程的特点,有利于其在智能设备中的应用。同时,L-C-H-A-L仿生皮肤片段对温度的两阶段响应特性可用于温度变化的智能识别。这些结果表明,在将来,这种L-C-H-A-L智能自供电仿生皮肤片段能够确保下一代神经集成软体工程系统(如物联网和人工智能领域中的仿生传感器或生物与非生物系统混合的修复装置)的同步信号传递。(文:吴文泽)
本文来自微信公众号“材料科学与工程”。欢迎转载请联系,未经许可谢绝转载至其他网站。

免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。







































































 技术文档
技术文档
 推荐好文
推荐好文







 155-2731-8020
155-2731-8020