















































软件

产品


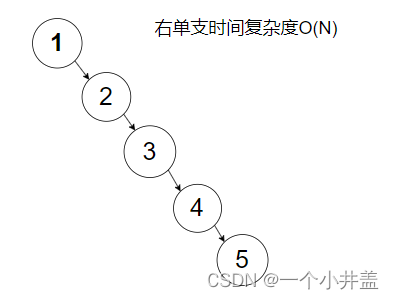
二叉搜索树可以缩短查找的效率,如果数据有序或接近有序二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下时间复杂度:O(N)
两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年 发明了一种解决上述问题的方法:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(对树中的结点进行调整),即为AVl树以他们的名字缩写命名也可以叫高度二叉搜索树
一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树,它就是AVL树。
如果AVl树有n个结点,其高度可保持在O(logN) ,搜索时间复杂度O(logN),为什么?
答:左右子树高度之差的绝对值不超过1,那么只有最后一层会差一部分的节点;

|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
|
template<class K, class V>
struct AVLtreeNode
{
//节点构造函数
AVLtreeNode(const pair<K, V>& kv)
:_left(nullptr)
,_right(nullptr)
,_parent(nullptr)
,_bf(0)
,_kv(kv)
{}
//节点的成员
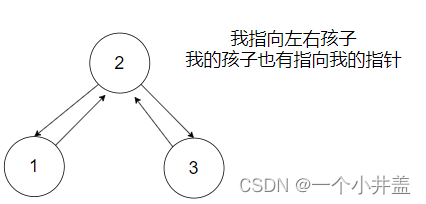
//三叉链
AVLtreeNode<K, V>* _left;
AVLtreeNode<K, V>* _right;
AVLtreeNode<K, V>* _parent;
int _bf;//平衡因子
//数据使用库里面的pair类存储的kv
pair<K, V> _kv;
};
template<class K,class V>
class AVLtree
{
typedef AVLtreeNode<K, V> Node;
public:
//构造函数
AVLtree()
:_root(nullptr)
{}
//四种旋转
void RotateL(Node* parent)
void RotateR(Node* parent)
void RotateLR(Node* parent)
void RotateRL(Node* parent)
//插入
bool Insert(const pair<K, V>& kv)
//寻找
Node* Find(const K& kv)
private:
Node* _root;
};
|
三叉链是什么?
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
|
bool Insert(const pair<K, V>& kv)
{
if (_root == nullptr)
{
_root = new Node(kv);
return true;
}
Node* parent = _root, *cur = _root;
while (cur)
{
//找nulptr,如果已经有这个key了,二叉搜索树的特性不支持冗余,所以返回失败
if (cur->_kv.first > kv.first)
{
parent = cur;
cur = cur->_left;
}
else if (cur->_kv.first <kv.first)
{
parent = cur;
cur = cur->_right;
}
else
{
return false;
}
}
//
cur = new Node(kv);
//判断孩子在父亲的左边还是右边
if (cur->_kv.first > parent->_kv.first)
{
parent->_right = cur;
cur->_parent = parent;
}
else
{
parent->_left = cur;
cur->_parent = parent;
}
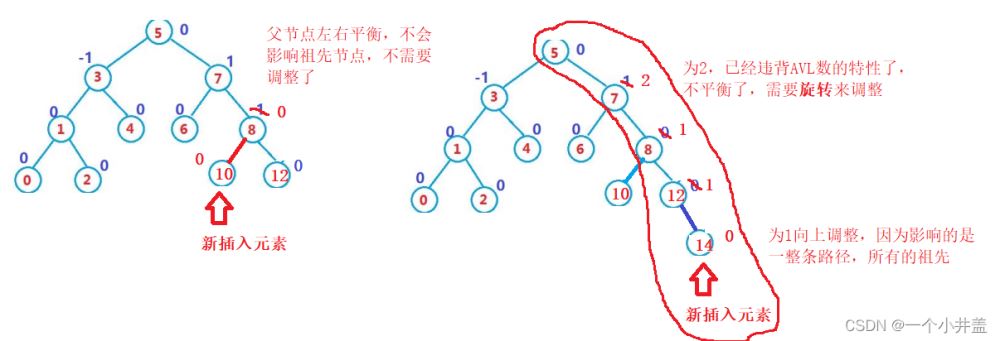
while (parent)
{
//影响一条路径所有的祖先
if (parent->_right == cur)
parent->_bf++;
else
parent->_bf--;
if (parent->_bf == 0)
{
//左右平衡了不会再影响祖先了
break;
}
if (parent->_bf == 1 || parent->_bf == -1)
{
//当前节点所在子树变了,会影响父亲
// 继续往上更新
cur = parent;
parent = parent->_parent;
}
else if (parent->_bf == 2 || parent->_bf == -2)
{
//parent所在子树已经不平衡,需要旋转处理一下
if (parent->_bf == -2)
{
if (cur->_bf == -1)
// 右单旋
RotateR(parent);
else // cur->_bf == 1
RotateLR(parent);
}
else // parent->_bf == 2
{
if (cur->_bf == 1)
// 左单旋
RotateL(parent);
else // cur->_bf == -1
RotateRL(parent);
}
break;
}
else
{
// 插入节点之前,树已经不平衡了,或者bf出错。需要检查其他逻辑
assert(false);
}
}
return true;
}
|
插入整体逻辑:
节点右子树最长路径-左子树最长路径,右边插入节点就+,左边插入节点就-;
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
|
void RotateR(Node* parent)
{
//轴点的左,孩子节点
Node* subL = parent->_left;
//孩子节点的右
Node* subLR = subL->_right;
//我的右当你(轴点)的左
parent->_left = subLR;
//调整三叉链
if (subLR)
subLR->_parent = parent;
//你(轴点)做我的右
subL->_right = parent;
//调整三叉链
Node* parentParent = parent->_parent;
parent->_parent = subL;
if (parent == _root)
{
_root = subL;
_root->_parent = nullptr;
}
else
{
//轴点的父亲新的孩子节点
if (parentParent->_left == parent)
parentParent->_left = subL;
else
parentParent->_right = subL;
subL->_parent = parentParent;
}
subL->_bf = parent->_bf = 0;
}
|

|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
|
void RotateL(Node* parent)
{
//轴点的右,孩子节点
Node* subR = parent->_right;
//孩子节点的左
Node* subRL = subR->_left;
//我的左当你(轴点)的右
parent->_right = subRL;
//调整三叉链
if (subRL)
{
subRL->_parent = parent;
}
//你(轴点)做我的左
subR->_left = parent;
Node* parentparent = parent->_parent;
parent->_parent = subR;
if (parent == _root)
{
if (parentparent->_left == parent)
parentparent->_left = subR;
else
parentparent->_right = subR;
subR->_parent = parentparent;
}
else
{
subR->_parent = nullptr;
_root = subR;
}
subR->_bf = parent->_bf = 0;
}
|

|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
|
void RotateLR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
int bf = subLR->_bf;
RotateL(parent->_left);
RotateR(parent);
// ...平衡因子调节还需要具体分析
if (bf == -1)
{
subL->_bf = 0;
parent->_bf = 1;
subLR->_bf = 0;
}
else if (bf == 1)
{
parent->_bf = 0;
subL->_bf = -1;
subLR->_bf = 0;
}
else if (bf == 0)
{
parent->_bf = 0;
subL->_bf = 0;
subLR->_bf = 0;
}
else
{
assert(false);
}
}
|
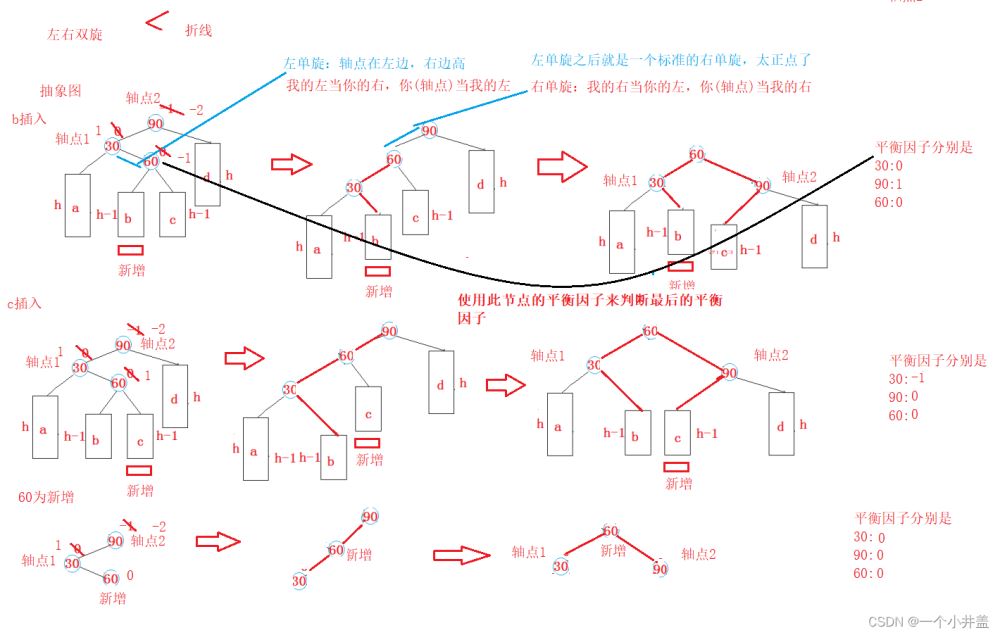
依靠3个被改变节点中最后一个来判断

|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
|
void RotateRL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
int bf = subRL->_bf;
RotateR(parent->_right);
RotateL(parent);
// 平衡因子更新
if (bf == 1)
{
subR->_bf = 0;
parent->_bf = -1;
subRL->_bf = 0;
}
else if (bf == -1)
{
parent->_bf = 0;
subR->_bf = 1;
subRL->_bf = 0;
}
else if (bf == 0)
{
parent->_bf = 0;
subR->_bf = 0;
subRL->_bf = 0;
}
else
{
assert(false);
}
}
|

AVL树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这样可以保证查询时高效的时间复杂度,即log2(N)
但是如果要对AVL树做一些结构修改的操作,性能非常低下,比如:
插入时要维护其绝对平衡,旋转的次数比较多,更差的是在删除时,有可能一直要让旋转持续到根的位置。因此:如果需要一种查询高效且有序的数据结构,而且数据的个数为静态的(即不会改变),可以考虑AVL树,但一个结构经常修改,就不太适合。
到此这篇关于C++AVL树4种旋转(左单旋、右单旋、左右双旋、右左双旋)的文章就介绍到这了,更多相关C++AVL树旋转内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















