















































软件

产品


在进行数据采集的过程中,需要根据实际情况选择合适的采集设备,现有的采集设备一般都是由多个传感器模块、显示模块、电源模块以及通信模块构成。在本课题中,我们选择了BWT61CL无线蓝牙版带电池陀螺仪姿态传感器作为本文的数据采集设备。该设备的主要参数指标如下表所示:
表1陀螺仪姿态传感器参数指标
| 参数名称 | 参数值 | |
| 1 | 电压 | 3.3V~5V |
| 2 | 电流 | <10mA |
| 3 | 尺寸 | 51.3mm*36mm*15mm |
| 4 | 测量精度 | 0.05 |
| 5 | 量程 | 加速度16g,角速度2000度/s,角度180度 |
| 6 | 分辨率 | 加速度6.1e-5g,角速度7.6e-3度/s |
| 7 | 测量维度 | 三维 |
| 8 | 输出频率 | 100Hz |
BWT61CL姿态传感器其主要构架包括了传感器模块、信号处理单元、信号收发接口等模块,其具有低功耗、低成本、轻便等优势[19]。该设备广泛应用于手机,GPS导航、计步器以及智能儿童手表等电子产品中,下面对该IMU设备的各个模块进行介绍。
加速度计是BWT61CL姿态传感器的一个重要组成部分,其属于惯性传感器的一种,通过加速度计可以采集人体的加速度信息,包括x轴加速度,y轴加速度以及z轴加速度。当人体在行走或者奔跑过程中,其加速度将表现为周期性的波动,那么通过加速度计则可以实时监测这种周期性变化,并根据这种周期特征来计算人体的步态和步伐数量。当人体处于静止状态或者匀速状态,此时加速度计只有垂直方向有数据,且近似为重力加速度。
陀螺仪同样是BWT61CL姿态传感器的一个重要组成部分,通过陀螺仪可以实时监测出人体在行走过程中的角速度。BWT61CL中的陀螺仪,其转轴方向将不随着支架的转动而变化,当设备收到外部角度变化的时候,其上下金属之间的电容会发生变化,根据电压值的改变大小来判断角度的变化大小。
数据采集环节是人体步行识别和步伐统计研究的第一环节,在本课题中,我们主要通过BWT61CL姿态传感器进行采集行人的xyz三个方向的加速度,xyz三个方向的角速度以及xyz三个方向的角度(如图3.1所示),为课题的研究提供最原始的分析数据。
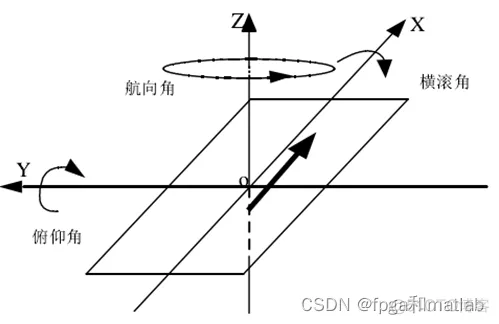
图1数据采集示意图
通过采集得到的数据主要包括人体沿着x轴、y轴、z轴的加速度,即ax,ay,az;沿着x轴、y轴、z轴的姿态角,即横滚角anglex,俯仰角angley,偏航角anglez,沿着x轴、y轴、z轴的角速度,即wx,wy,wz;一共九组特征数据。由图3.1可知,横滚角以x轴作为旋转轴,俯仰角以y轴作为旋转轴,航偏角以z轴为旋转轴。通过IMU设备对数据进行实时的采集,可以记录行人不同的行走状态。最终采集的数据结构如下所示:

图2数据样本图
clc;clear;close all;warning off; sel = 2; load R1.mat[locsy1,indxy1]=func_peak(ay1);[locsz1,indxz1]=func_peak(az1);[locsy2,indxy2]=func_peak(ay2);[locsz2,indxz2]=func_peak(az2);[locsy3,indxy3]=func_peak(ay3);[locsz3,indxz3]=func_peak(az3);if sel == 1figure;subplot(211);plot(Timesa,ay1,'b');hold onplot(Timesa(locsy1),ay1(locsy1),'ro'); hold onplot(Timesa(indxy1),ay1(indxy1),'k*'); hold onstem(Timesa(locsy1),ay1(locsy1),'ro')xlabel('time');ylabel('ay');subplot(212);plot(Timesa,az1,'b');;hold onplot(Timesa(locsz1),az1(locsz1),'ro');hold onplot(Timesa(indxz1),az1(indxz1),'k*');hold onstem(Timesa(locsz1),az1(locsz1),'ro')xlabel('time');ylabel('az');Tay1 =[Timesa(locsy1)]';Tby1 =[Timesa(indxy1)]';Ay1 =[ay1(locsy1)]'; Taz1 =[Timesa(locsz1)]';Tbz1 =[Timesa(indxz1)]';Az1 =[az1(locsz1)]'; ptime1 = [67.574,68.031,68.602,69.235,69.775,70.352,70.922,71.636,72.201,72.66,73.212];ptime2 = [67.407,68.12,68.762,69.347,69.881,70.448,70.998,71.567,72.20,72.755,73.307];for i = 1:length(ptime1)-1 diff1(1,i)=ptime1(i+1)-ptime1(i); diff2(1,i)=ptime2(i+1)-ptime2(i);end2*mean(diff1)2*mean(diff2)figure;plot(ptime1-ptime2); p1=[66.2,66.402,66.519,66.746,66.951,67.05,67.198,67.343,67.499,67.615,67.913,68.201,68.531,68.868,69.155,69.393,69.698,69.991,70.235,70.559,70.802,71.145,71.381,71.687,71.972,72.288,72.53,72.844,73.104,73.431,73.707,73.858];p2=[66.936,67.170,67.360,67.499,68.021,68.333,68.531, 68.554,68.629,68.951,69.222,69.56,69.798,70.021,70.378,70.596,70.611,70.661,70.667,70.671,70.979,71.197,71.553,71.794,72.1,72.321,72.678,72.911,73.245,73.423,73.493,73.847,73.994];for i = 1:length(p1)-1 diff1(1,i)=p1(i+1)-p1(i); diff2(1,i)=p2(i+1)-p2(i);end5*mean(diff1)5*mean(diff2) ay=mean(sqrt(ax1(locsz1).^2 + ay1(locsz1).^2 + az1(locsz1).^2))endif sel == 2figure;subplot(211);plot(Times2,ay2,'b');hold onplot(Times2(locsy2),ay2(locsy2),'ro');hold onplot(Times2(indxy2),ay2(indxy2),'k*');hold onstem(Times2(locsy2),ay2(locsy2),'ro')xlabel('time');ylabel('ay');subplot(212);plot(Times2,az2,'b');;hold onplot(Times2(locsz2),az2(locsz2),'ro');hold onplot(Times2(indxz2),az2(indxz2),'k*');hold onstem(Times2(locsz2),az2(locsz2),'ro')xlabel('time');ylabel('az');ptime1 = Times2(locsy2);ptime2 = Times2(indxz2);for i = 1:length(ptime1)-1 diff1(1,i)=ptime1(i+1)-ptime1(i); diff2(1,i)=ptime2(i+1)-ptime2(i);end2*mean(diff1)2*mean(diff2)% figure;% plot(ptime1-ptime2); p1=Times2(indxy2(4:end));p2=Times2(indxz2);for i = 1:length(p1)-1 diff1(1,i)=p1(i+1)-p1(i); diff2(1,i)=p2(i+1)-p2(i);end5*mean(diff1)5*mean(diff2)ay=mean(sqrt(ax2(locsz2).^2 + ay2(locsz2).^2 + az2(locsz2).^2))end if sel == 3figure;subplot(211);plot(Times3,ay3,'b');hold onplot(Times3(locsy3),ay3(locsy3),'ro');hold onplot(Times3(indxy3),ay3(indxy3),'k*');hold onstem(Times3(locsy3),ay3(locsy3),'ro')xlabel('time');ylabel('ay');subplot(212);plot(Times3,az3,'b');;hold onplot(Times3(locsz3),az3(locsz3),'ro');hold onplot(Times3(indxz3),az3(indxz3),'k*');hold onstem(Times3(locsz3),az3(locsz3),'ro')xlabel('time');ylabel('az');ptime1 = [100.685;101.31;101.89;102.666;103.198;103.794;104.343;104.918;105.308;105.865;106.536;] ;ptime2 = [100.885;101.47;102.039;102.589;103.143;103.707;104.281;104.823;105.387;105.952;106.536;]; for i = 1:length(ptime1)-1 diff1(1,i)=ptime1(i+1)-ptime1(i); diff2(1,i)=ptime2(i+1)-ptime2(i);end2*mean(diff1)2*mean(diff2)figure;plot(ptime1-ptime2); p1=Times2(indxy2(4:end));p2=Times2(indxz2);for i = 1:length(p1)-1 diff1(1,i)=p1(i+1)-p1(i); diff2(1,i)=p2(i+1)-p2(i);end5*mean(diff1)5*mean(diff2)ay=mean(sqrt(ax3(locsz3).^2 + ay3(locsz3).^2 + az3(locsz3).^2))end 1.2.3.4.5.6.7.8.9.10.11.12.13.14.15.16.17.18.19.20.21.22.23.24.25.26.27.28.29.30.31.32.33.34.35.36.37.38.39.40.41.42.43.44.45.46.47.48.49.50.51.52.53.54.55.56.57.58.59.60.61.62.63.64.65.66.67.68.69.70.71.72.73.74.75.76.77.78.79.80.81.82.83.84.85.86.87.88.89.90.91.92.93.94.95.96.97.98.99.100.101.102.103.104.105.106.107.108.109.110.111.112.113.114.115.116.117.118.119.120.121.122.123.124.125.126.127.128.129.130.131.132.133.134.135.136.137.138.139.140.141.142.143.144.145.146.147.148.149.150.151.152.153.154.155.156.157.158.159.160.161.162.163.164.165.166.167.168.169.170.171.172.173.174.175.176.177.178.179.180.181.182.183.184.185.
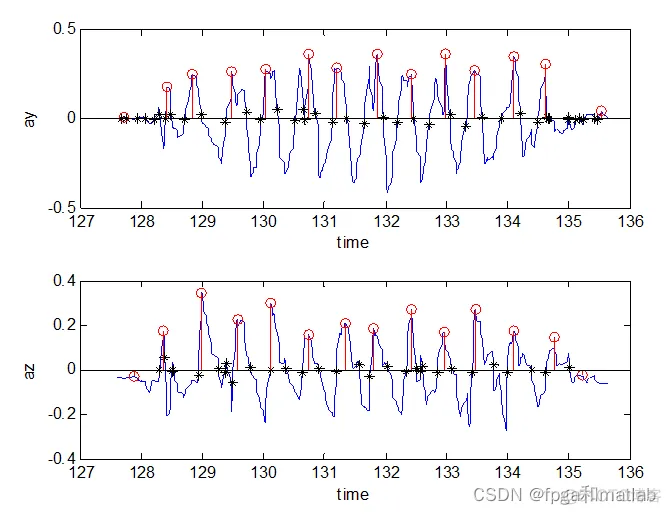
从图的仿真结果可知,通过峰值检测和过零检测算法,我们可以得到各个峰值以及过零点值,其具体数值结论如下:
100.8850,101.4700,102.0390,102.5890,103.1430,103.7070,104.2810,104.8230,105.3870,105.9520,106.5360。两个轴上峰值的检测时刻误差为: -0.2000,-0.1600,-0.1490,0.0770,0.0550,0.0870,0.0620,0.0950,-0.0790,-0.0870,0。那么由y轴加速度数据和z轴加速度数据,我们分别得到的步伐周期为1.1302s和1.1702s。由此可见,通过y轴和z轴计算的步伐周期之间存在一定的差异性。同理,根据过零点时刻数据,由y轴加速度数据和z轴加速度数据,我们分别得到的步伐周期为1.1091s和1.1629s。由此可见,通过y轴和z轴计算的步伐周期之间存在一定的差异性。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















