















































软件

产品


 Turtlebot 3仿真导航...
Turtlebot 3仿真导航...
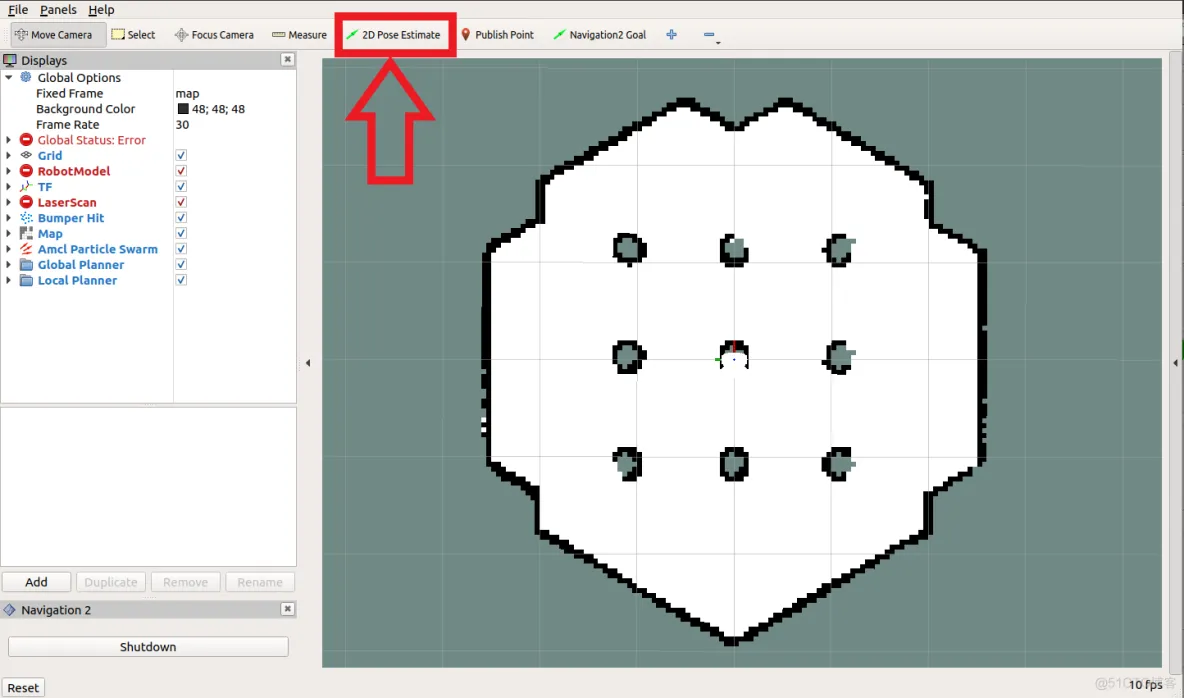
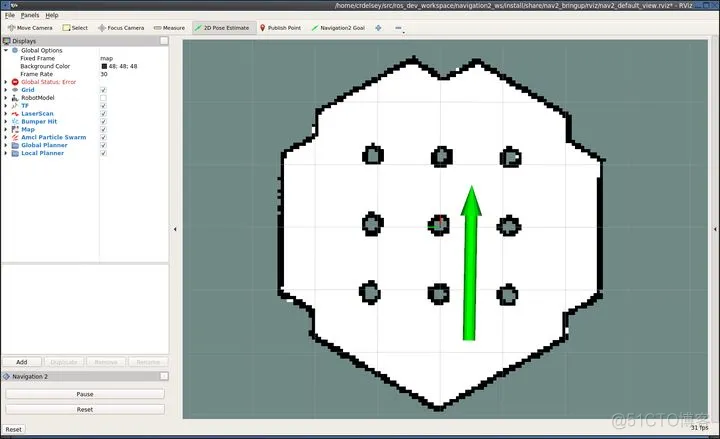
启动后,机器人最初不知道自己在哪里。默认情况下,Nav2会等待用户给它一个近似的起始位置。看看机器人在Gazebo世界中的位置,并在地图上找到那个位置。在RViz中点击“2D Pose Estmate”按钮设置初始姿态,然后在地图上点击该位置。可以通过点击拖动来设置方向。
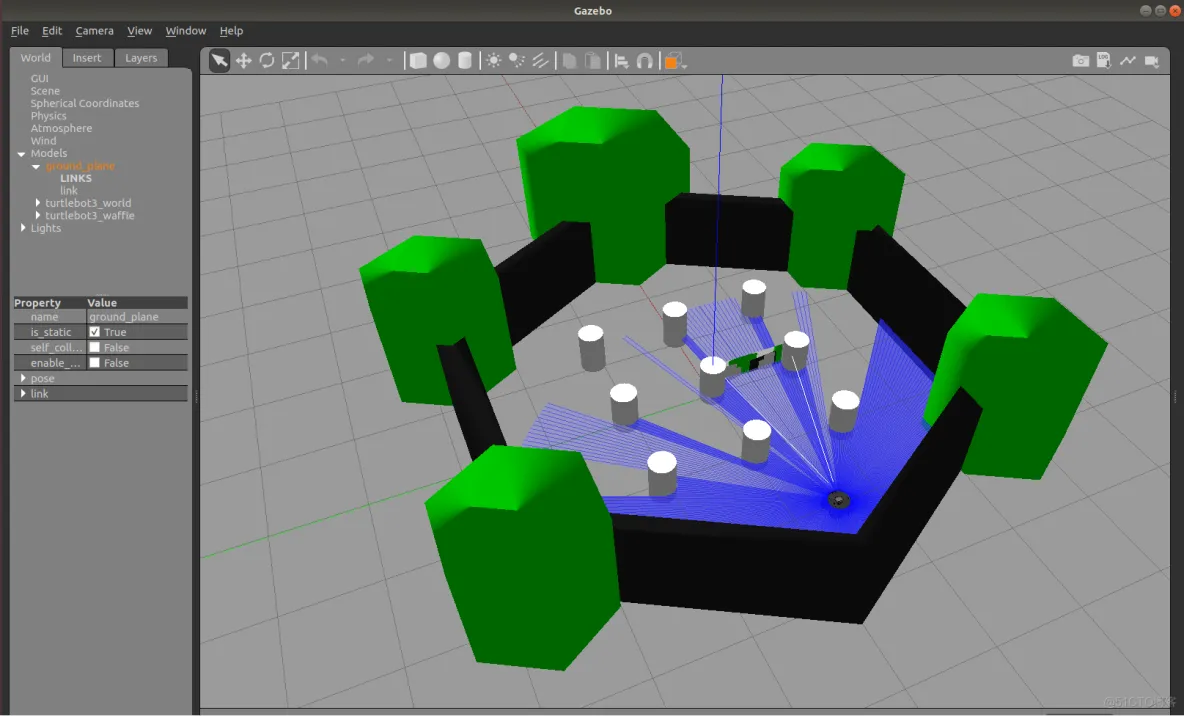
如果您目前使用的是默认设置,那么机器人应该大致如下所示:
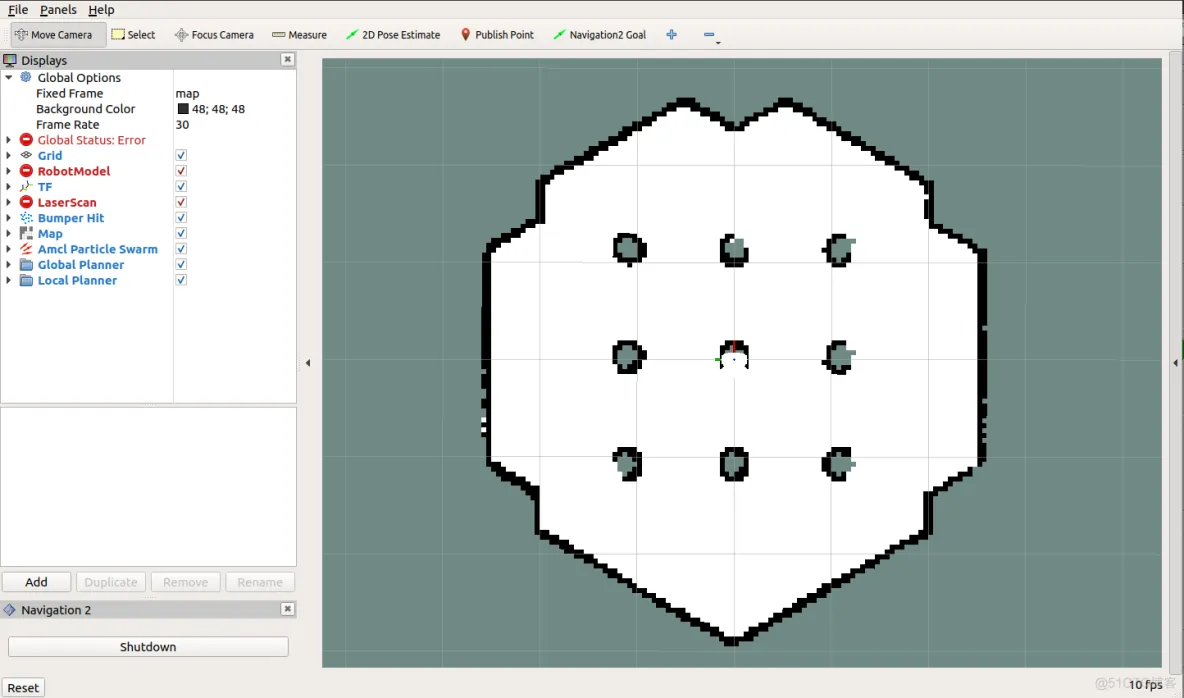
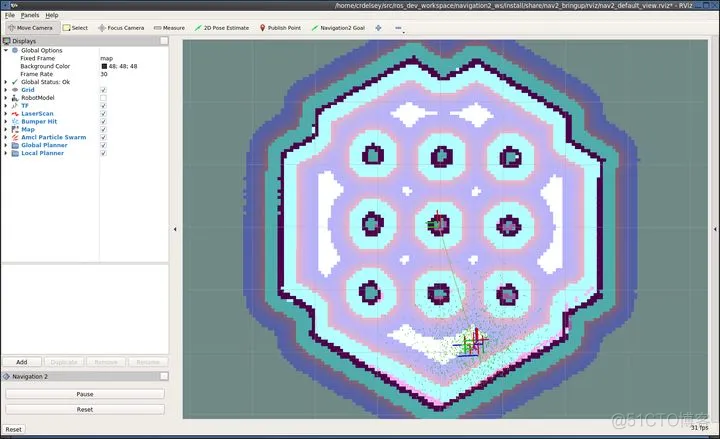
一旦设置好机器人初始位置后,就会完成坐标变换树,且Nav2会完全激活并准备就绪。现在应该可以看到机器人和点云:
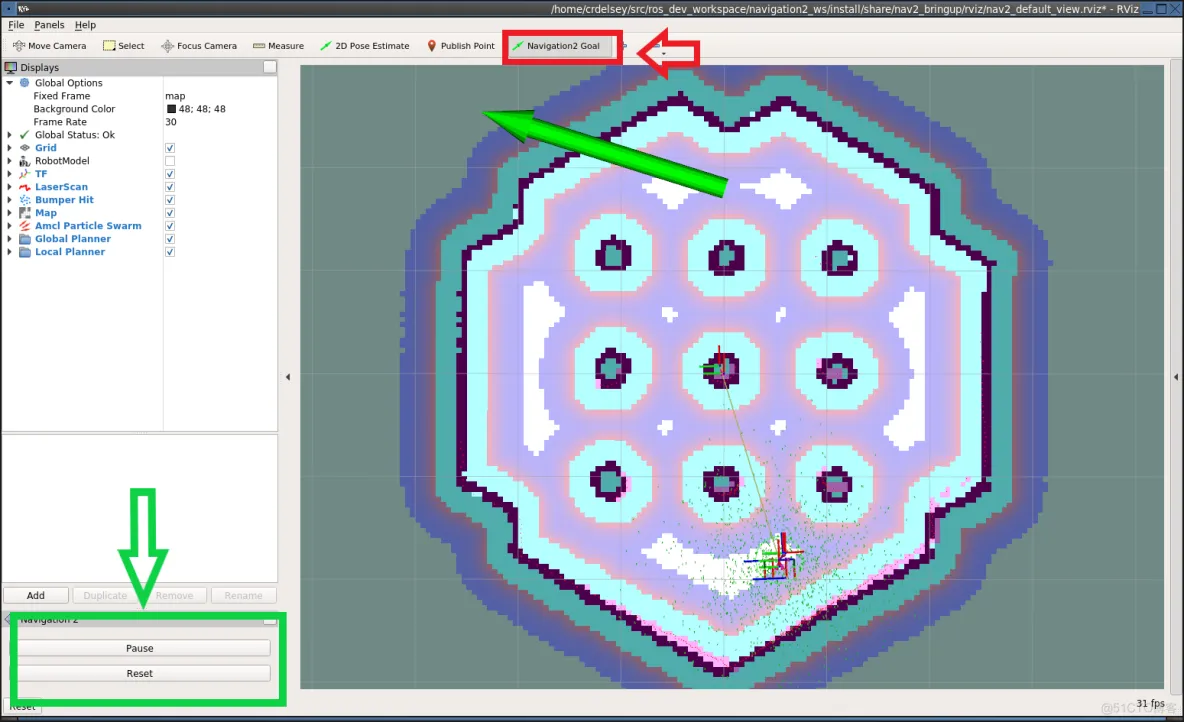
接下来,点击“Navigaton2 Goal”按钮,选择目标。这将调用BT导航器通过动作服务器到达目标。可以通过Nav2 rviz插件暂停(取消)或重置操作(左下角)。
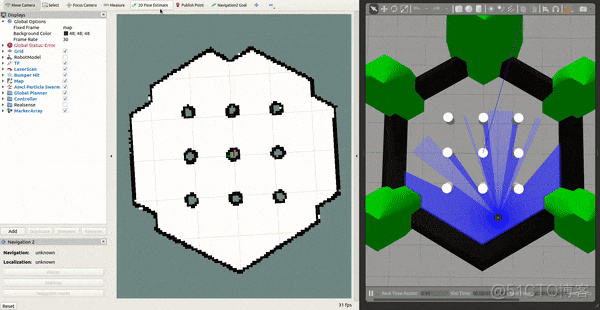
此时,就能看到机器人在移动:
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















