















































软件

产品


今天给大家带来的是基于UG的弯管成形运动仿真,在实际的管路制造中,管形的合理化设计至关重要,在实际制造中由于受数控弯管机的外廓影响,肯定会存在管子在折弯时与弯管机发生碰撞的情况,基于此情况,预先在管路设计阶段进行弯管机运动仿真即可大大缩短整个管路设计制造周期,达到事半功倍的效果.
还是一开始就放出最后结果动图。
一般工程技术人员仅需通过手边的UG软件即可完成此项工作,本帖主要讲解一下运动原理以及UG运动仿真模块的基本设置.至于弯管机的具象外廓,还要具体型号具体建模.
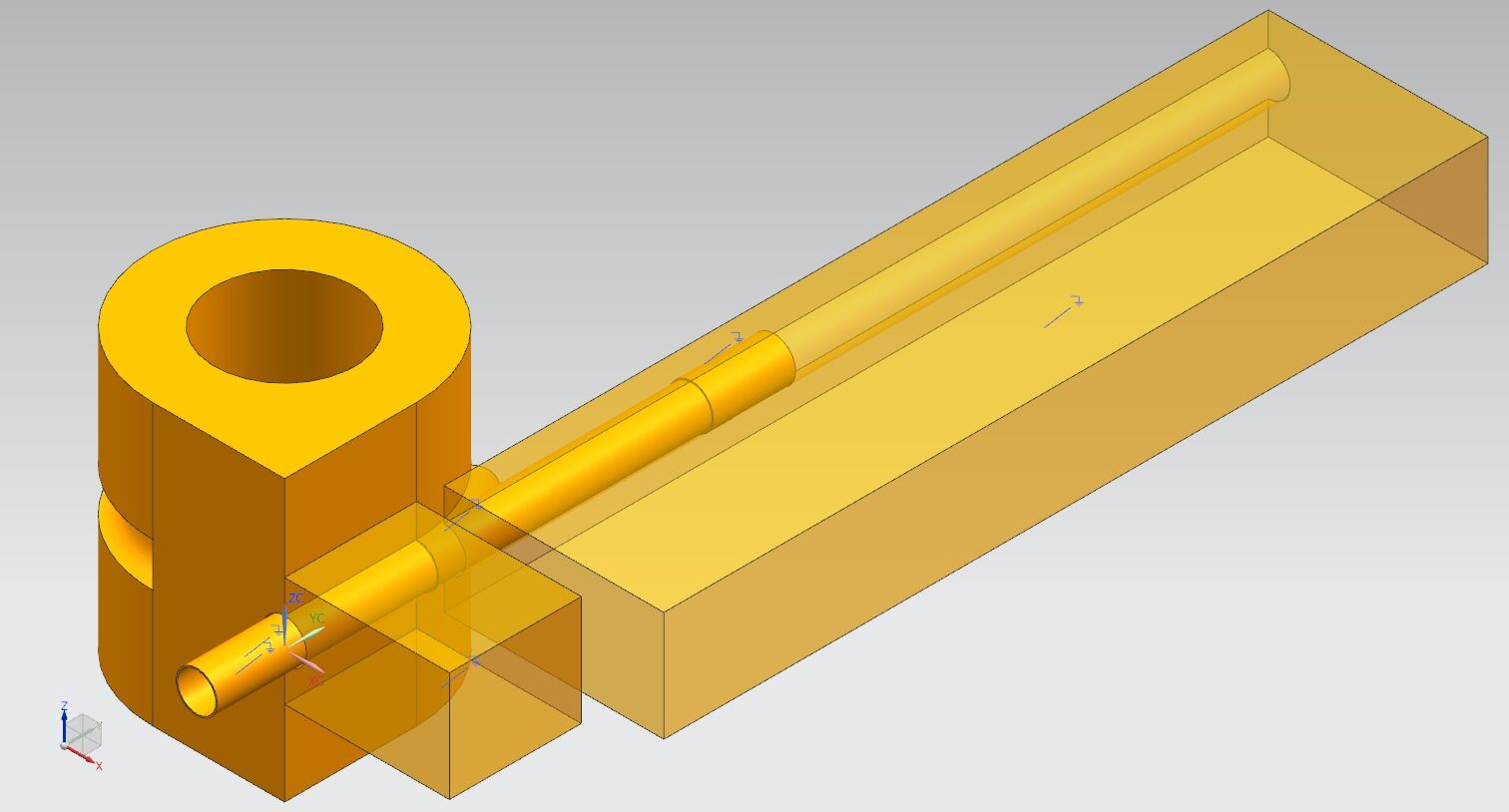
首先分别对弯模,夹模,压模建立模形,并按实际位置进行装配,本例为直径8毫米的整套模具
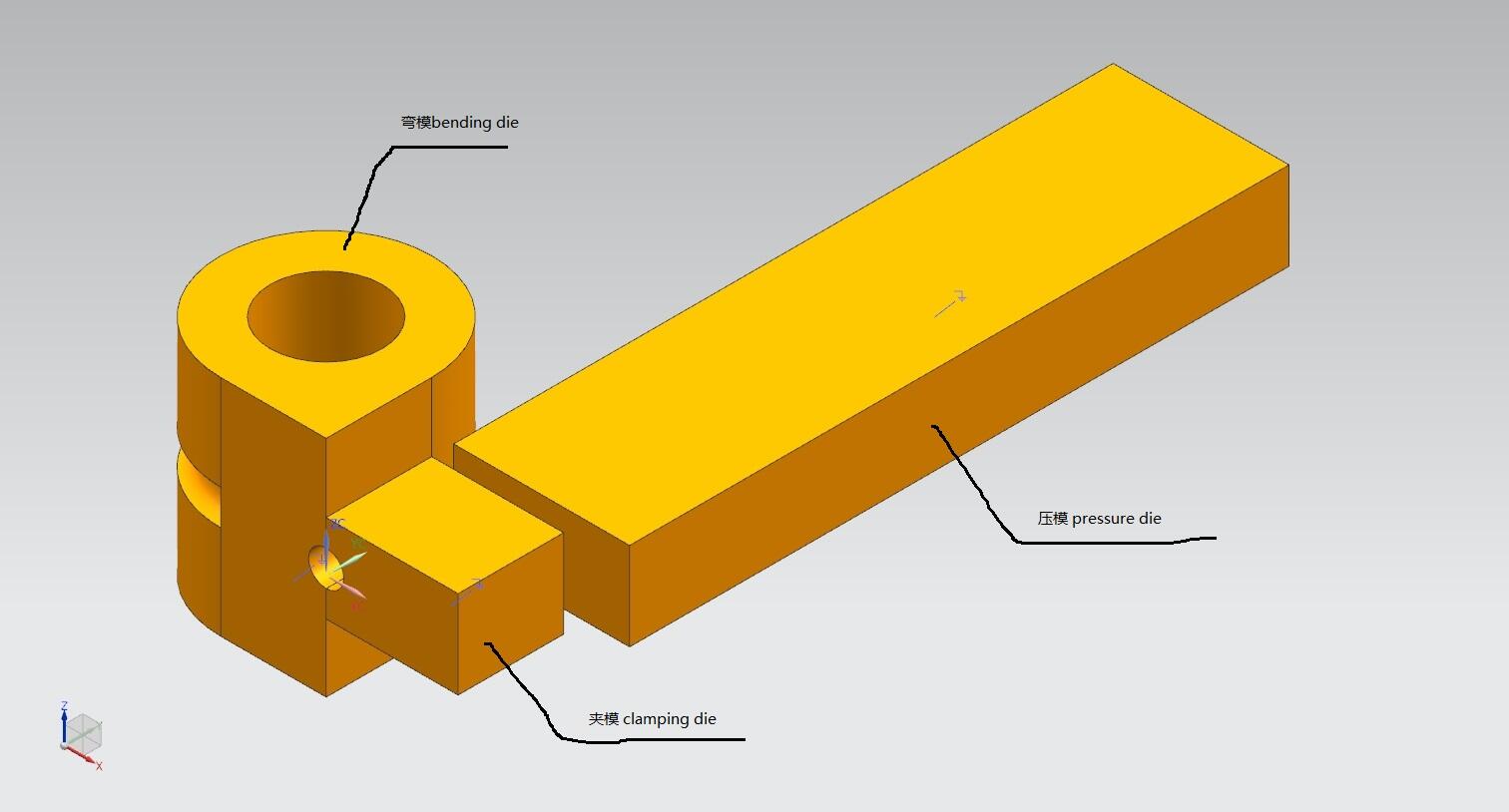
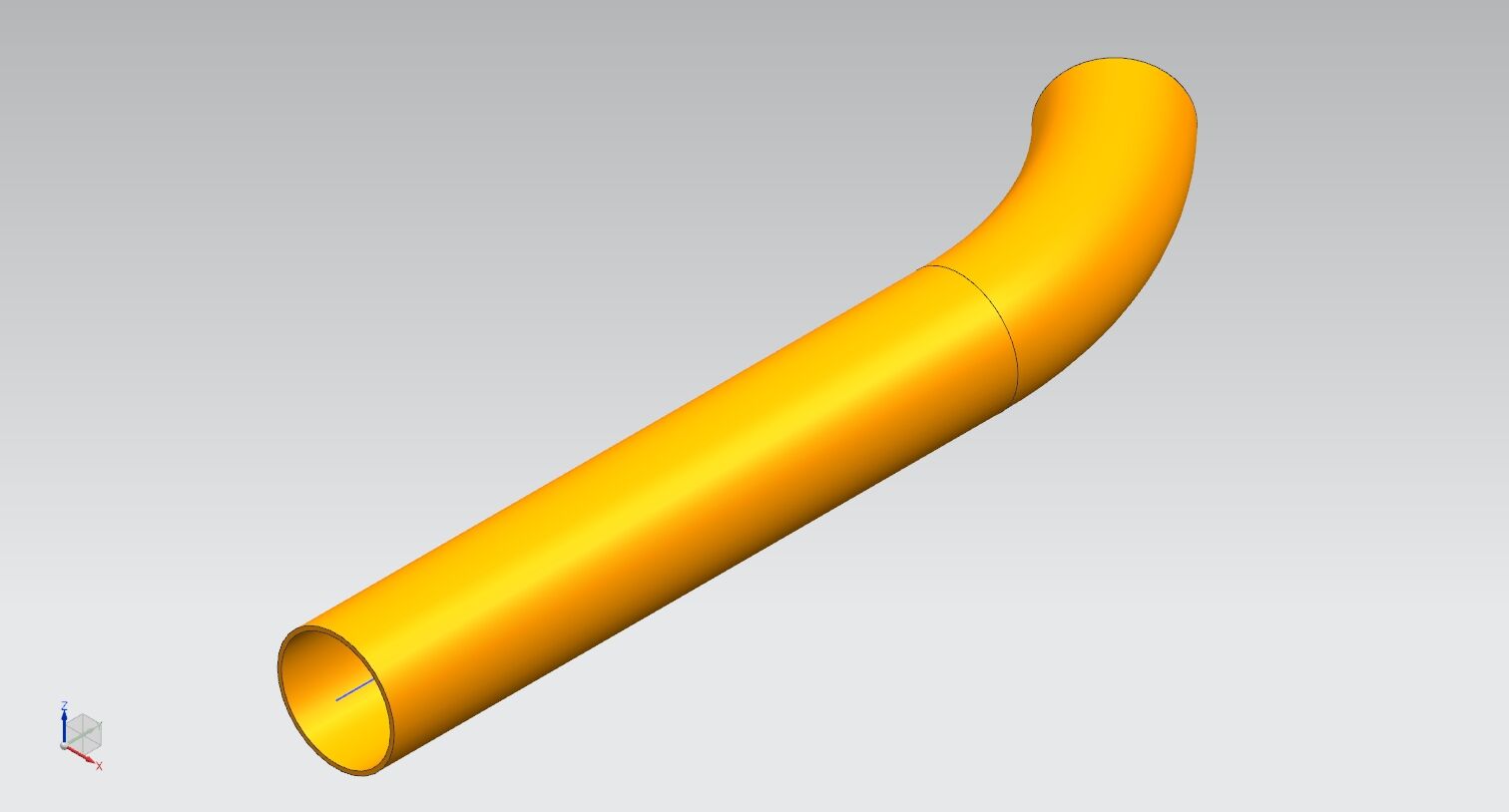
由于只使用建模及运动仿真模块,管形的变化是首要解决的问题,本例要进行C:45度折弯,解决的办法即是先建一个45度的弯管,然后按成形初始位置进行装配.
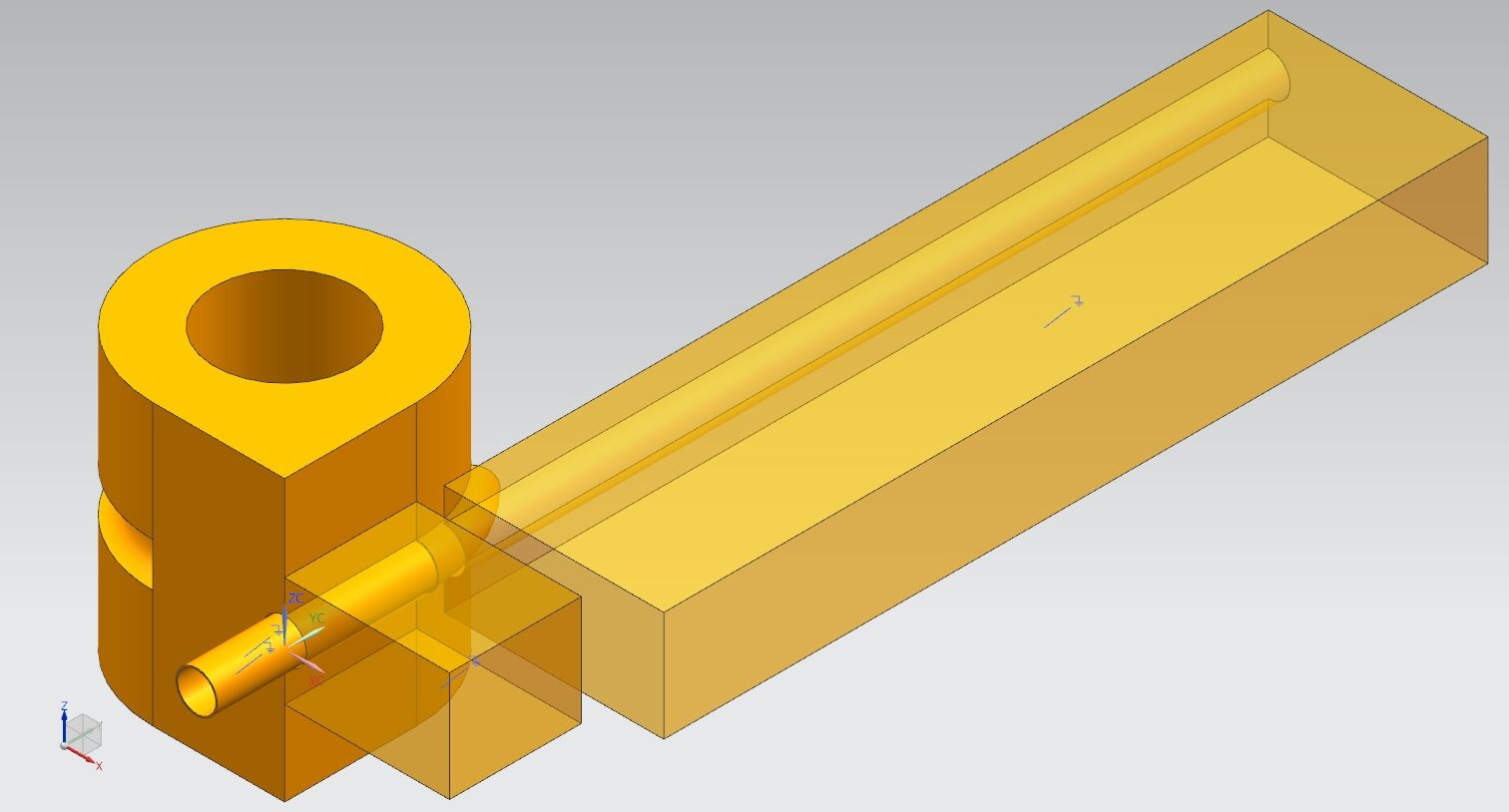
之后再对柱塞夹以及旋转柱塞进行建模并装配.至此完成全套机构的建模及装配.
接下来切换至运动仿真模块,新建仿真.创建连杆,对上诉装配的所有模块进行定义连杆.之后进行运动副的设定.弯模设定为旋转副,压模设定为滑动副,旋转柱塞设定为旋转副.45度管设定为旋转副啮合柱塞,柱塞设定为滑动副啮合旋转柱塞,夹模设定为滑动副啮合弯模.
重点就是设定驱动参数,我们将整个时间设定为100s,这100s内的运动过程分为如图5个状态

每个状态分别持续20秒,在驱动参数的设置中,我们采用STEP函数进行设定,下面以弯模为例,弯模的函数设定如下:
step(x,0,0,20,step(x,20,45,60,step(x,60,45,80,step(x,80,0,100,0)))),意为,从0-20秒内,弯模旋转45度,之后从20秒开始至60秒一直保持45度的状态,从第60秒开始至第80秒,弯模归位至0度,第80秒至100秒保持0度。掌握了这个运动规律,可以一一对剩余的连杆进行设定。
以下为完成后的动画,后续还将对UG进行二次开发,对成套模具进行快速参数化建模,缩短运动仿真准备时间。

免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















