软件

产品


自动驾驶汽车在进行规模化商用之前,必须进行充分的功能安全和性能安全试验验证,以确保驾驶员和其他交通参与者的安全。测试内容包括传感器、算法、执行器、人机界面等。从应用功能、性能的稳定性和鲁棒性,以及功能安全、预期功能安全、形式认证等各个方面的测试中综合考虑,从而可以确保车辆能够自主上路。
如上整个测试过程分为仿真测试与实车测试,而前半部分都称之为仿真测试,这也是自动驾驶系统开发和验证的重要手段。自动驾驶仿真测试,是指通过计算机仿真技术,建立现实静态环境与动态交通场景的数学模型,让自动驾驶汽车算法在虚拟交通场景中进行的驾驶测试。
自动驾驶仿真平台概述
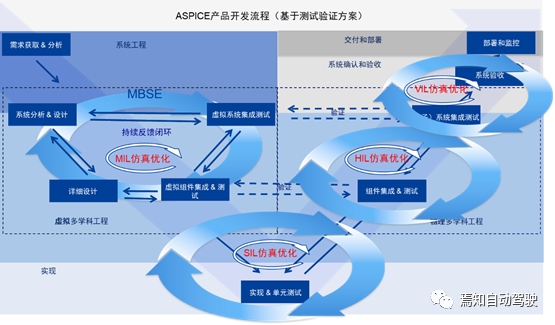
仿真测试的核心是测试模型,围绕测试模型还包括测试流程、仿真使用平台、模型构成,并覆盖从产品设计验证、开发验证、测试验证、体验评价全过程。整个仿真测试平台由1个主体流程、5大仿真测试类别、3种仿真模型构成,覆盖产品设计、开发验证、测试验证、体验评价全过程。这里我们从仿真测试的角度说明下如上各个测试阶段的内容和要点。
1个流程是指从ASPICE的标准软件研发流程出发,从设计域、开发域到测试域进行整体测试验证。其中包括系统设计阶段以MIL仿真侧视贯穿整个系统分析&设计、详细设计、虚拟组建集成&测试和虚拟系统集成测试;在软件设计阶段通过不断的SIL仿真实现单元测试,同时以HIL仿真优化实现组建集成和测试,最后通过VIL仿真优化实现系统集成测试和系统验收。
5类测试平台涉及整个开发过程,需要经历从软件在环(SIL)、硬件在环(HIL)、车辆在环(VIL)、封闭测试场测试、开放道路测试几个大步骤。
MIL(Model in the Loop)模型在环测试是一种模型在环仿真平台,用在需求分析概念阶段,实现算法开发与验证优化,是一种在开发的初期阶段及建模阶段中进行的仿真测试方式。与HIL测试(硬件在环测试)不同,HIL测试是用于代码验证的方法,而MIL测试是一种设计验证的方法。
MIL测试过程是通过输入一系列的测试用例,验证模型是否满足了设计的功能需求。MIL是所有测试中最关键的,因为MIL的测试概念标准必须源于功能需求,没有其它的东西可以参考。而SIL/PIL的测试用例往往都是借用MIL的测试用例,一旦在MIL这个阶段的使用了错误测试用例,即使后面的测试都通过了,这个错误还是会产生影响。
SIL(Software in the Loop)测试的目的是为了验证自动生成的代码和用于代码生成的模型中行为上是一致的。SIL测试实际上可看成一种MIL的等效测试(等效测试的目的是为了防止代码生成过程出错),实际代码运行在环仿真平台,通过模型生成代码和算法分析,验证代码和模型的一致性。
HIL(Hardware in the Loop)平台:硬件在环仿真平台,用于测试控制器系统中硬件、底层软件和应用层软件。通过将被测控制器和工控机相连接,工控机上运行着被控对象的模型,模拟出被控对象的电气特性。需要注意的是HIL测试的对象是按照实际路况进行测试响应的。
VIL(Vehicle in the Loop)测试应用于车辆在环仿真平台,提高了被测控制器的性能测试结果精确度,与实车测试相比,更加节约成本,降低测试风险,增强测试可复现性。弥补了实车测试与硬件在环测试之间的鸿沟,可用于复杂场景/人机交互评价。
除开如上常用的仿真测试以外,有能力的主机厂还会进行另外的DIL和PIL测试。DIL测试即是针对驾驶模拟器或相关设备进行的仿真测试,用于评价驾驶员在环测试,功能/HMI设计和主观评价。而PIL测试是将生成的代码运行到目标处理器上,通过测试结果发现编译器出错可能引入的bug。这里PIL测试与SIL测试是等效测试,但是SIL试运行到Windows下的编译器上。
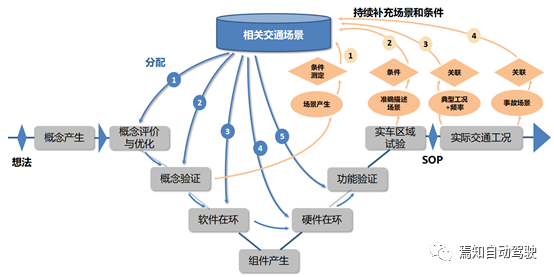
3种仿真模型构成包含场景/场景库,感知系统,车辆本身,控制器。其中场景是自动驾驶开发、测试、验证的核心。依据数据库中的数据及记录,定义出不同的交通场景, 通过将定义的交通场景重新带回到关联的研发步骤中去,以仿真的方法确保系统安全性。感知系统能力测试方面,根据传感器种类的不同,模拟不同的信号内容,比如:摄像头传感器输出图像信号,激光雷达传感器输出点云信号,导航传感器输出定位信号。同时,根据传感器特性和参数的不同,模拟出相应的“局限”,比如:传感器的探测范围,摄像头的畸变和炫光,不同材质对激光雷达光线吸收的影响,护栏对毫米波雷达的杂波影响。车辆本身是指其动力学模块,一般参照真实车辆,由车身、动力传动系统、悬架系统、转向系统、制动系统和车轮等不同的子系统构成。
基于云端管理的仿真测试平台
传统的仿真测试一般是单机仿真测试,目前常见的仿真测试工具有很多种,根据不同的自动驾驶开发需求,大致可分为如下几种:传统主机厂倾向于使用汽车工业的商业软件,使用机器人平台开发自动驾驶算法的团队常常使用ROS/Gazebo,很多擅长计算机图形学的团队基于游戏引擎开发仿真工具。而大规模复杂交通流的仿真需求,则由交通规划领域的软件来满足需求。其中场景仿真中,国内应用现状为主要采用PreScan/Panosim/VTD,车辆动力学应用中,主要应用CarMaker/CarSim等应用软件,而测试管理部分则主要采用ECUTEST。
如上无论选择何种仿真工具,构建一个完整的、精度高的仿真测试平台自然都是最终的目标。然而,实际开发测试过程中,传统的单机测试存在如下问题:
高精度地图制作与匹配无法有效进行,高逼真静态场景的建立仍然无法满足,先进感知传感器的物理仿真可用性仍然不正确,驾驶员模型与智能交通体模型仿真能力仍旧不完善,动态场景库建设仍旧不充分。
基于此,我们提出一种基于云管理的仿真测试能力建设平台方案,由于云平台本身具备海量数据存储、处理和管理的能力,同时,可以有效的建立城市级地理信息+虚拟交通流信息,可实现跨专业多用户信息交互与共享,具备较好的覆盖性、批量化、自动化、超实时。与单机仿真测试软件相结合,可以很好的弥补单机仿真测试软件的弊端。
当前云仿真平台应用在国内外现状主要还是应用在国外高端车品牌中,如宝马使用ANSYS,奥迪主要使用Cognata、福特使用Quantum Signal,丰田主要使用Drive Constellation。而在国内的几家主要应用端包括有百度云仿真平台Apollo Simulator,腾讯云仿真平台TADSim,及华为云服务平台Octopus。在涉及云平台仿真终端中,主要考虑的因素包括云计算、道路模型、交通模型、环境模型、传感器模型、动力学模型、DOE分析、SOTIF几个重要的方面。云平台仿真测试中需要建立四大云平台终端:即自动驾驶虚拟仿真测试云平台,自动驾驶功能安全&预期功能安全分析云平台,仿真、场地、道路测试一体化管理喝共享云平台,自动驾驶一体化仿真开发/测试/管理共享云平台。
对于如上的四类云平台重点关注的部分主要有:如何进行有效的场景库建设?如何基于车联网等网络平台进行数据场景重建?如何基于不同的控制域搭建相关的仿真模型库?如何建立功能评价体系和场景及虚拟仿真评价方法?
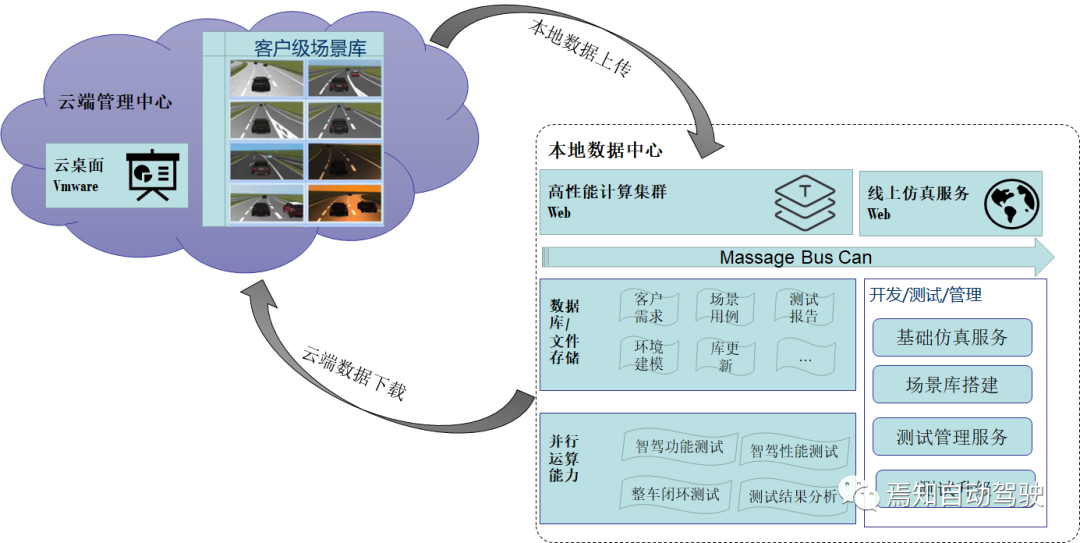
关于仿真测试云平台架构设计来讲,总体上,主要分布在两个层面(如上图)。
其一,是面向客户端的的场景库建立及面向客户端的云桌面管理平台搭建。场景库主要来自客户级需求子项,场景库的搭建在前述文章中有所提及,主要涉及客户需求产生相应的场景概念,并贯穿在软件、组件、硬件等几大方面,最终生成相应的场景验证设置方案。
其二,是构建强有力的本地数据中心,作为有效的线上仿真服务和高性能计算集群。该计算集群的主要分布为三个等级序列。
i底层为物理层,中层为仿真测试层,顶层为数据层。物理层主要作用为集群管理节点层,可以动态调度算法/资源分配,设置为管理员权限,可多人协同,承载局限为CPU/GPU资源利用率可能受限,为了突破物理硬件限制,采用全部容器化的K8s解决方案和集群管理器联合,做到承担节点的扩展基于容器,不再基于硬件,可以很好的提供扩展的便捷性。
ii中层为仿真测试层,这也是整个云仿真架构的核心,主体是将原始的自动驾驶场景库输入至场景编辑器,结合传感器/车辆动力学模型进行宏观与微观交通流的仿真搭建,进而完成诸如MIL、SIL等软件级别的仿真测试。在此过程中,利用云平台进行计算加速、算法上传、高速通讯、安全校验等过程。在自动化测试阶段,利用测试用例库,结合批量测试生成测试评价报告,并分析报告结果。这一过程中需要接入多测试平台,进行开环与闭环验证,实现“一云两端”的架构结果。
iii上层为数据层,利用基础数据管理工具对原始数据、解析数据、场景数据进行管理,随后利用数据清洗工具进行可视化、融合、数据转换,并进行场景标注后打上标签,最后利用格式处理工具进行多维动态数据输出。构建驾驶场景数据到仿真平台之间的桥梁。
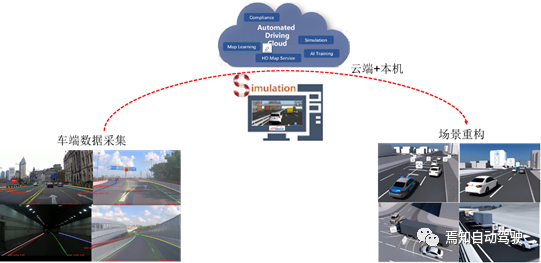
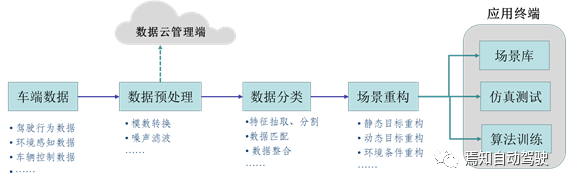
对于真正的云端仿真肯定是需要将仿真应用于云平台上,或者说,在云平台上搭建仿真系统,这一过程实际上就是一种典型的后端场景重构策略。既然涉及云数据管理,那么必须要要用到车联网这一数据上传与下载终端。车辆数据通过云端存储、数据预处理、场景重构还原形成场景库积累,用于仿真测试及算法训练。
总结
自动驾驶仿真测试平台是面向智能网联汽车提供平台集成于工程服务的重要手段,该方式有助于构建轻量化/全栈式仿真测试工具链,推进高级别自动驾驶技术的全面落地应用。其中,基于云端平台的仿真过程是具备较大的仿真能力建设优势的,主要体现在云端可以提供更多的数据算力,同时在涵盖同一个平台下的多个场景库覆盖度下也可以提供更多的支持,这样不仅省时省力,而且大大提高了仿真效率。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020