















































软件

产品


LiDAR(光探測和測距)是一種感測器技術,可通過測量發射光從周圍物體反射並返回到接收器所需的時間來幫助創建環境的3D數字地圖。這種3D映射作為自動駕駛汽車的關鍵使能技術在汽車行業變得越來越重要。在汽車行業之外,LiDAR用於移動設備,用於增強現實、測量距離以及模糊照片和影片中的背景等功能。
在這篇文章中,我們將展示如何使用ZOS-API創建使用者分析來測量LiDAR系統的飛行時間(TOF)。分析將讀取ZRD檔,提取資料並繪製到達探測器的射線的飛行時間。
什麼是自訂分析?
ZOS-API(應用程式介面(Application Programming Interface)) 支援 OpticStudio 的連接和定制。連接應用程式和 OpticStudio 有 4 種程式模式,但它們可以分為兩大類:
自訂分析模式用於填充自訂分析的資料。這些資料是用OpticStudio提供的現有圖形來顯示,用於大多數分析。此模式不允許對當前鏡頭系統或使用者介面進行更改(即:在這種模式下只允許對系統的副本進行更改)。自訂分析可以用C++ (COM)或C# (.NET)編寫。本文的自訂分析是用C#編寫的。
有關自訂分析的更多資訊,請點擊程式設計(Programming)選項卡>關於ZOS-API (About the ZOS-API) >自訂分析 (User Analysis),查看內置幫助檔。
打開新的程式設計範本
使用C#創建自訂分析:

用戶分析
使用Windows資源管理器打開解決方案資料夾‘..\Documents\Zemax\ZOS-API Projects\CSharpUserAnalysisApplication1’。Visual Studio也打開了新的解決方案。該解決方案包含範例程式,該範例程式可以用作任何自訂分析的基礎範本。在Visual Studio中,用戶自訂分析被編譯為可執行檔,然後將可執行檔複製到\Zemax\ZOS-API\User Analysis資料夾中,以便OpticStudio可以使用。
打開LiDAR 文件
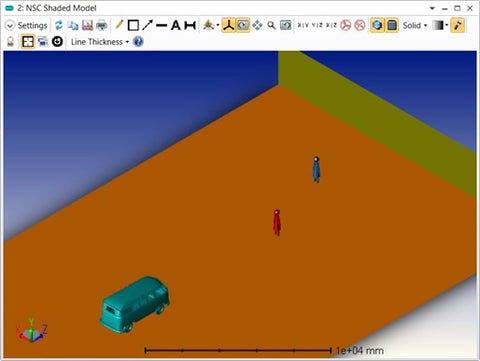
可以在本文的附件連結中下載檔案“Flash_NSC_Final.zar”,該檔中包含代表快閃雷射雷達的系統,雷射雷達位於貨車的頂部,貨車在路上,路上還有兩個行人和一堵立著的綠色牆體。
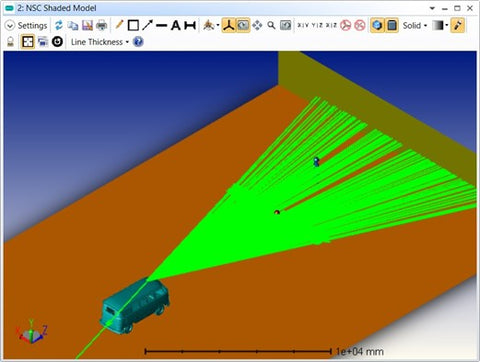
雷射雷達向場景中發射雷射脈衝:
光照射到周圍的物體上發生散射,部分光被散射回雷射雷達探測器。如下圖所示:來自紅色行人的散射光到達了雷射雷達探測器的一個單位圖元上。
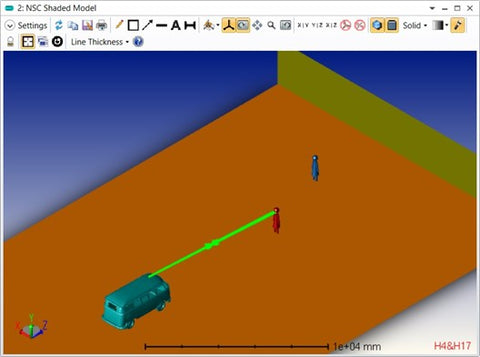
雷射雷達會將接收到返回信號花費的時長記錄下來,即飛行時間,並將飛行時間轉換為距離。圖元的位置可表明入射光的方向。
這兩個值都表明散射光線來自站在離貨車10米遠的紅色行人。OpticStudio實際上測量的不是時間,而是光線路徑長度,也就是物體和探測器之間的距離。
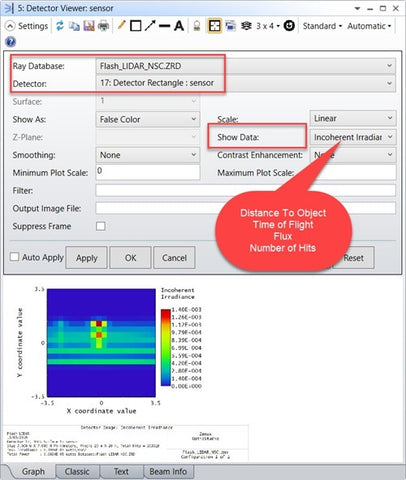
探測器檢視器(Detector Viewer)可以顯示探測器上輻射特性的測量結果,但它不顯示從雷射雷達光源返回到雷射雷達探測器的光線經過的距離。這就是ZOS-API派上用場的時候!自訂分析可以顯示探測器到物體的距離資料,從而反映飛行時間的資訊。
使用光線資料庫檢視器讀取ZRD檔
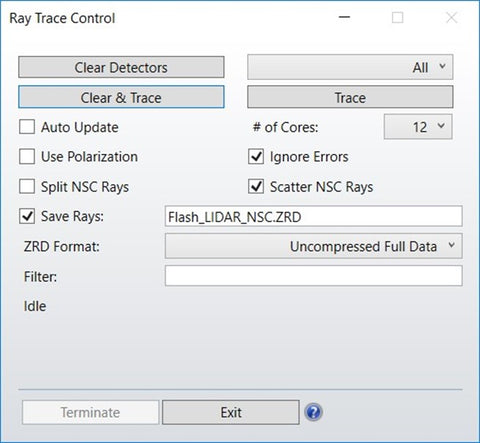
光線的路徑長度可以在ZRD檔中讀取,這些檔是光線資料庫檔。下一步是在ZRD檔中運行光線跟蹤和保存光線。
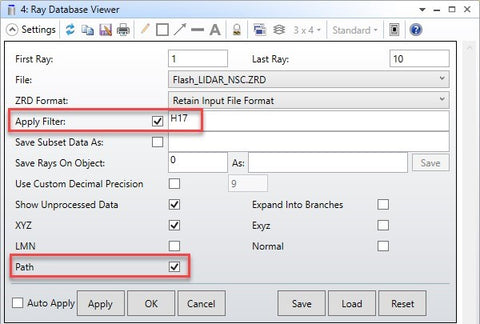
點擊分析(Analyze)>光線資料庫檢視器,可以顯示照射到探測器17上的光線的路徑長度。將“使用字串(Apply Filter)”設置為H17來過濾照射到探測器17上的光線。
例如,光線1的第8段已經到達探測器17,該光線的路徑長度4E4(40m)是所有光線段的光線路徑長度之和。光線經過物體,然後回到探測器。物體到探測器的距離是該路徑的一半,即20米。
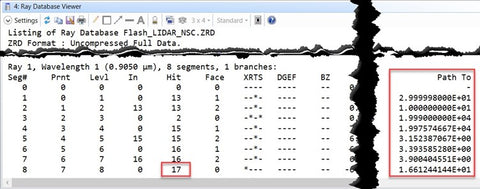
所以,物體到探測器的距離可以通過讀取照射到探測器的每條光線的路徑長度來確定,可以使用ZOS-API自動完成此操作。
我們現在已經介紹了什麼是用戶分析、如何打開樣板範本、如何打開LiDAR檔以及如何使用射線資料庫檢視器讀取 ZRD 檔。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















