















































软件

产品


LinGo在曲柄滑块机构优化设计的应用
LinGo在曲柄滑块机构优化设计的应用
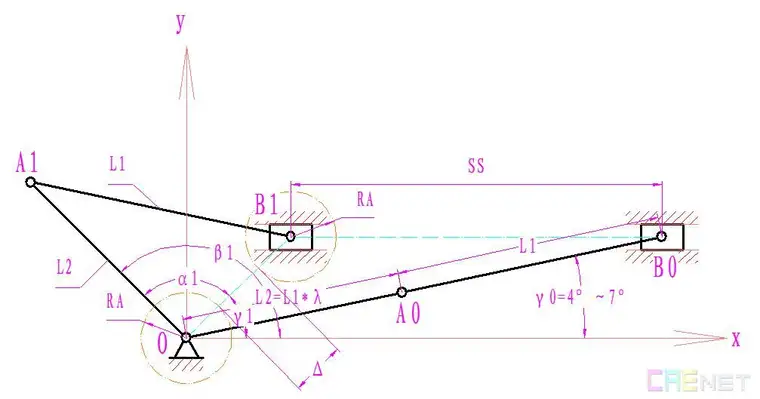
机构的两个极限位置如图所示,其中,初始位置为0(O、A0、B0);终止位置为 1(O、A1、B1)。
已知条件:
1. γ0=4°~7°。
2. L2=λ*L1,λ=0.7~0.95。
3. β1=γ1+α1≤135°。
4. S=1000mm。
5. B1只许位于A1的右边。即:角∠B1OA0<90°,γ1-γ0<90°-γ0。转化成式子应该是这样吧?
6.铰B与铰O不许干涉,RB=RO=RA=125mm,外缘间隙Δ=25mm。
求:
请设计图示机构。要求L1+L2总和最小。
说明:
本项目要求设计图示机构,要求当S=1000mm时,在符合已知条件且L1+L2总和最小的情况下求图示机构参数的具体数值,即:
L1=?
L2=?
γ0=?
LinGo源程序:
min=L1+L2;
SS=1000;!滑块行程,已知;
RA=125;!铰A、B、O外缘半径;
delta=25;!铰外缘间隙;
PI=3.141592653589793;!定义圆周率;
deg=PI/180;!定义度;
OB1=@sqrt((L1+L2)^2+SS^2-2*SS*(L1+L2)*@cos(gamma0));
gamma1=@acos(((L1+L2)*@cos(gamma0)-SS)/OB1);
alpha1=@acos((OB1^2+L2^2-L1^2)/(2*OB1*L2));
alpha1+gamma1<=135*deg;
lambda=L2/L1;
0.7<=lambda;lambda<=0.95;
4*deg<=gamma0;gamma0<=7*deg;
0<L1;0<L2;
SS<=L1+L2;
L1=@sqrt(OB1^2+L2^2-2*OB1*L2*@cos(alpha1));!是否采用此项会有不同的结果;
OB1<L1+L2;
L1<L2+OB1;
L2<L1+OB1;
OB1<L1+L2+SS;
SS<OB1+L1+L2;
L1+L2<SS+OB1;
OB1>0;
0<gamma1;gamma1<90*deg-2*gamma0;
OB1>=2*RA+25;!增了此项约束方可求解;
alpha1>0;
!求出结果后再用ADAMS进行优化,将受力部分加进行去;
优化设计结果:
Solution is locally infeasible
Infeasibilities: 0.1119504E-03
Total solver iterations: 51
Variable Value Reduced Cost
L1 675.4069 0.000000
L2 563.6608 0.000000
SS 1000.000 0.000000
RA 125.0000 0.000000
DELTA 25.00000 0.000000
PI 3.141593 0.000000
DEG 0.1745329E-01 0.000000
OB1 275.0000 0.000000
GAMMA0 0.1221730 0.000000
GAMMA1 0.5812955 0.000000
ALPHA1 1.774899 0.000000
LAMBDA 0.8345500 0.000000
Row Slack or Surplus Dual Price
1 1239.068 -1.000000
2 0.000000 -0.8311012
3 0.000000 -2.231042
4 0.000000 0.000000
5 0.000000 23.82101
6 0.000000 4287.782
7 -0.1107399E-04 1.115521
8 -0.4647025E-06 0.000000
9 -0.4981383E-06 0.000000
10 0.000000 0.000000
11 -0.8186694E-07 0.000000
12 0.1345500 0.000000
13 0.1154500 0.000000
14 0.5235988E-01 0.000000
15 0.000000 612.5403
16 675.4069 0.000000
17 563.6608 0.000000
18 239.0677 0.000000
19 -0.1119504E-03 0.000000
20 964.0677 0.000000
21 163.2539 0.000000
22 386.7461 0.000000
23 1964.068 0.000000
24 514.0677 0.000000
25 35.93231 0.000000
26 275.0000 0.000000
27 0.5812955 0.000000
28 0.7451547 0.000000
29 0.000000 -1.115521
30 1.774899 0.000000
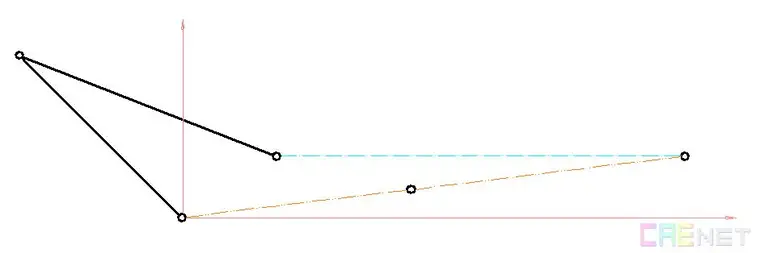
优化设计后的方安草图:
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















