软件

产品


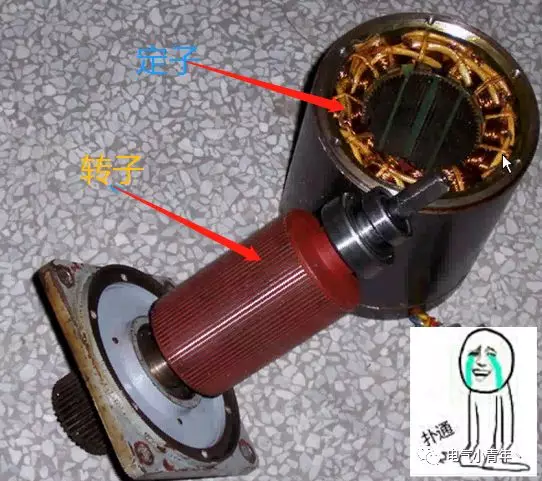
1.步进电机的工作原理
步进电机的=是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的速转、停止的位置只取决于控制脉冲信号的频率和脉冲数。
脉冲数越多,电机转动的角度越大。
脉冲的频率越高,电机转速越快,但不能超过最高频率,否则电机的力矩迅速减小,电机不转。
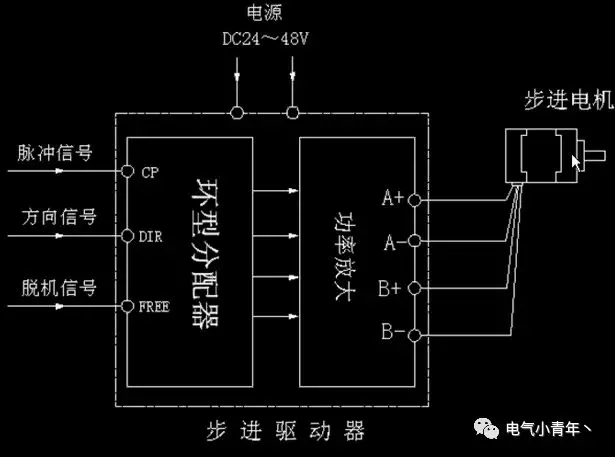
2.步进驱动器
1) 从步进电机的转动原理可以得出,要使步进电机正常运行,必须按规律控制步进电机的每一相绕组得电。步进驱动器接受外部的信号是方向信号(DIP)和脉冲信号( CP)。另外步进电机在停止时,通常有一相得电,电机的转子被锁住,所以当需要转子松开时,可以使用脱机信号(FREE)。
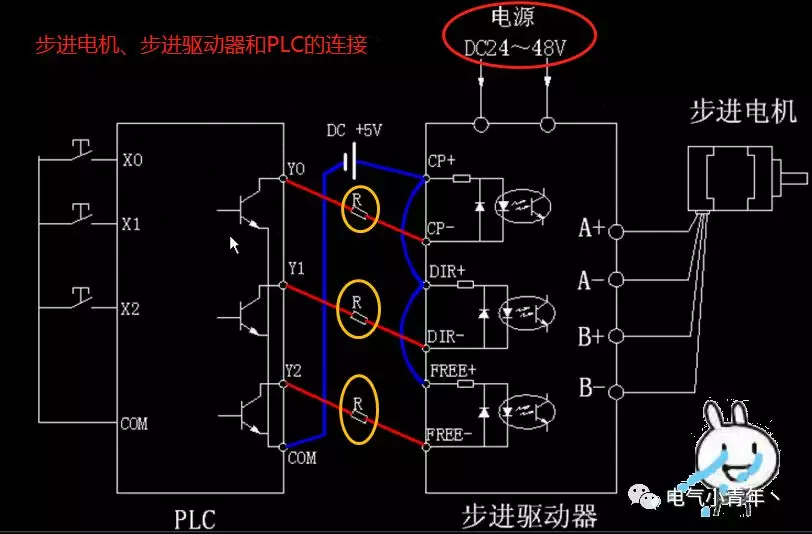
下面是步进电机、步进驱动器和PLC之间的接线
当Y0、Y1、Y2得电时形成回路
(5V+→CP+→CP-→Y0→com→5V-)
有几个注意的地方:
①步进驱动器的电源要采用单独的电源,不能plc上的电源(PLC上的电源电流只有100mA左右)
②当电源为DC24V时,通常要接一个限流电阻R(黄圈)
2)细分
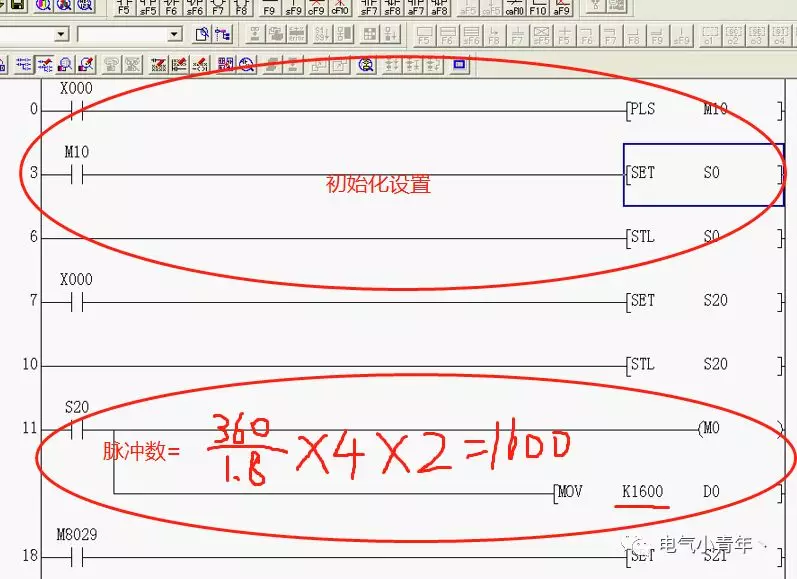
为了提高步进电机控制的精度,现在的步进驱动器都有细分功能,所谓细分,就是通过驱动器中的电路的方法把步距角减小。(例如把步进驱动器设置成5细分,假设原来的步距角1.8°,那么设为5细分后,步距角就是0.36°。即一步分5步走完)
具体怎么设置可参考说明书
3.应用案例
利用PLC做上位机,控制步进电机按一定的角度旋转。
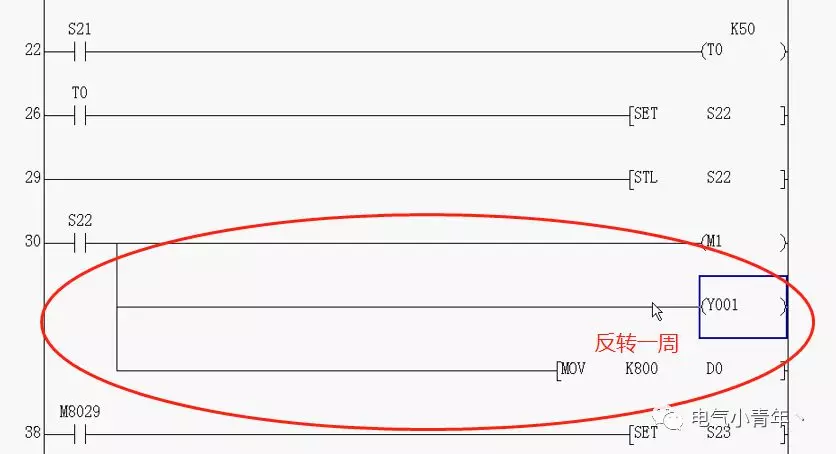
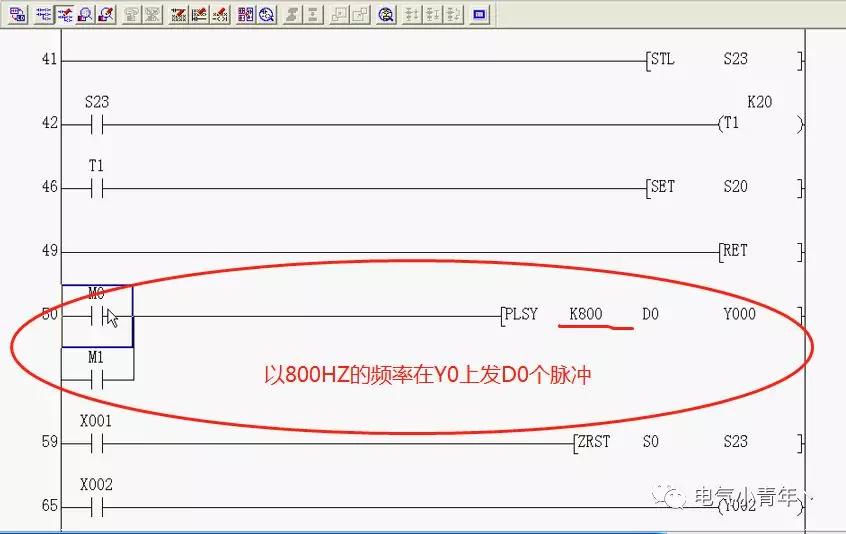
利用PLC控制步进电机顺时针转两周,停5秒,逆时针转一周,停两秒,如此循环进行,按下停止按钮,电机马上停止(电机轴锁住)
按下脱机按钮,电机的轴松开。
X0(启动) X1(停止) X2(脱机)
Y0(脉冲输出) Y1(控制方向) Y2(脱机控制)
4细分 电机额定电流是2.2A(设置步进驱动器)
程序如下:
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020