软件

产品


导读
离心压缩机是许多大型石化企业的关键设备,一旦出现故障,往往会造成很大的经济损失。如何使离心压缩机安全、长周期的稳定运行,成为各个石化企业关注的首要问题。成熟合理的控制和保护系统方案可以为压缩机安全、稳定地运行提供最有力的保障。随着安全仪表系统(SIS)的发展和普及,传统的将压缩机组所有相关的控制和保护都集成在一套硬件系统(ITCC)内的做法已满足不了IEC61511独立性的要求。API670:2014Machinery protection system的更新内容也表明压缩机组的控制功能和保护功能相互独立是将来的大趋势。在考虑压缩机组控制和保护系统之前,首先要确定控制和保护系统应实现的目标。本文根据大量的实际工程经验,并结合API相关标准把汽轮机驱动离心压缩机分为工艺系统、蒸汽系统、油路系统、机械保护系统、盘车装置、压缩机启动和紧急停车系统分别来阐述控制和保护功能,其目的是从工艺和机械的角度出发增强对压缩机组的认识,有助于更深刻地理解机组控制和保护方案。
工艺气系统
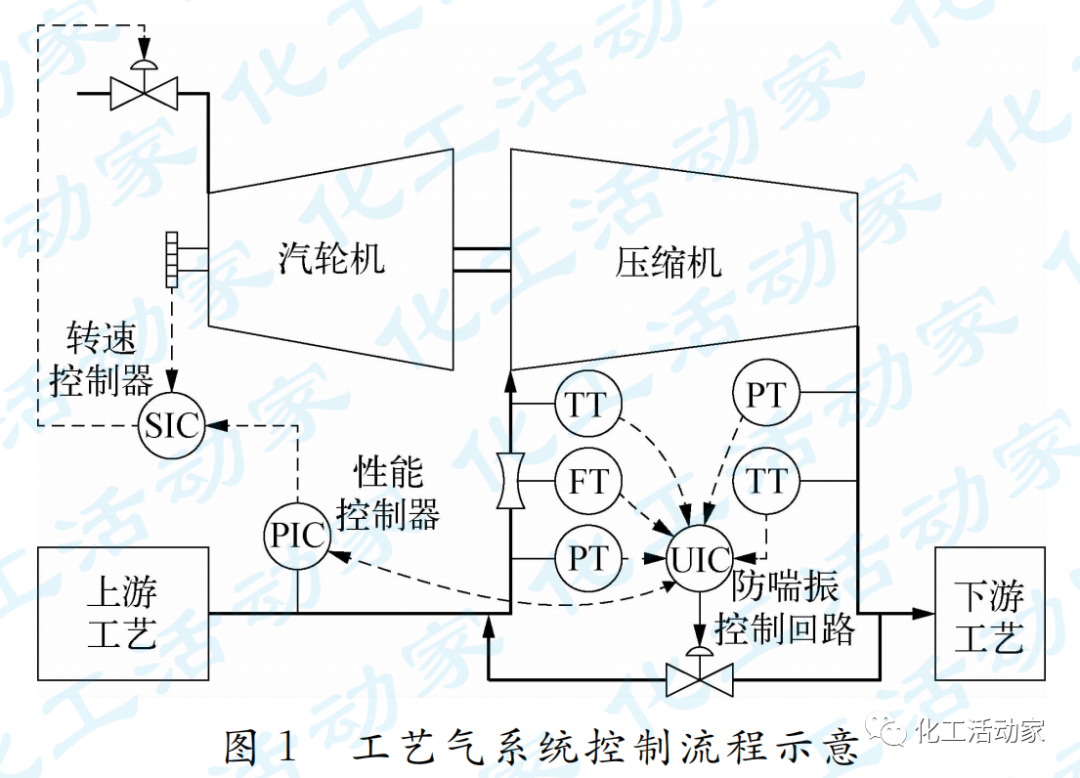
工艺气系统控制流程如图1所示,主要包括防喘振控制回路、性能控制回路和喘振检测系统三部分。
01防喘振控制
离心压缩机瞬间流动逆转的现象称为喘振。
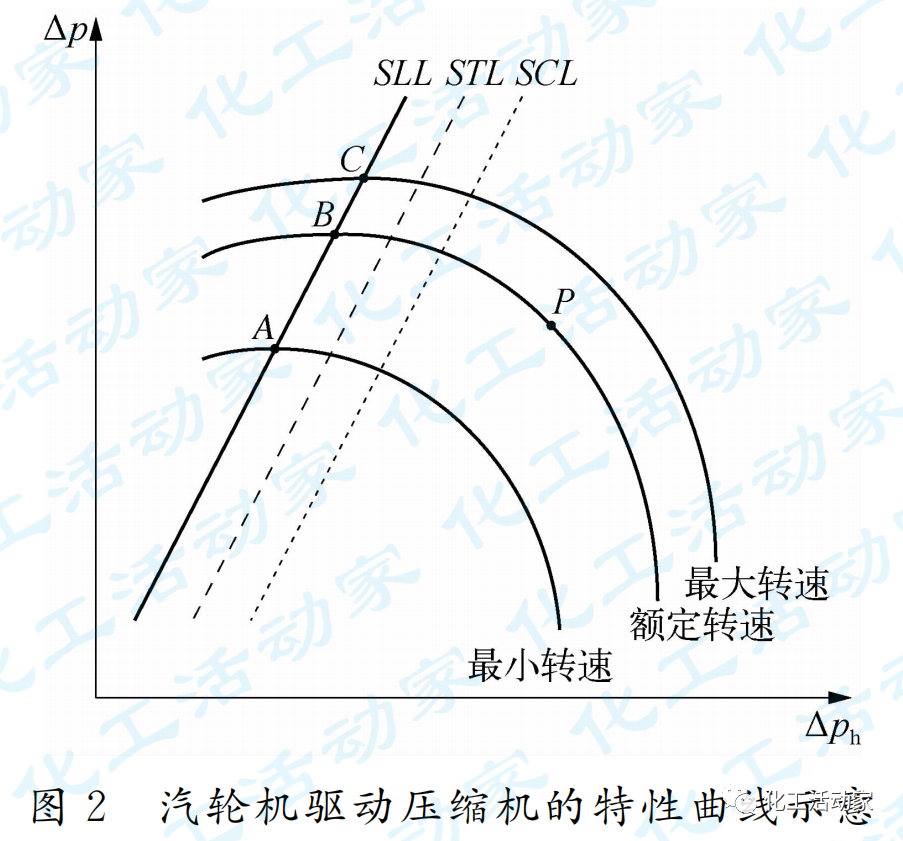
喘振过程中,压缩机出口压力快速地下降,然后快速恢复,这种循环的低频率高振幅的气流振荡会造成压缩机内部件严重损坏。汽轮机驱动(可变速)压缩机的特性曲线如图2所示,在每个工作转速下,随着流量的下降,压气机都达到一个最大排气压力,连接这些点(图2中A到C点)的线就是喘振线SLL。其中,ΔP为压缩机出口与入口的压差;ΔPh为流量计差压,STL为喘振联锁线,SCL为喘振控制线。
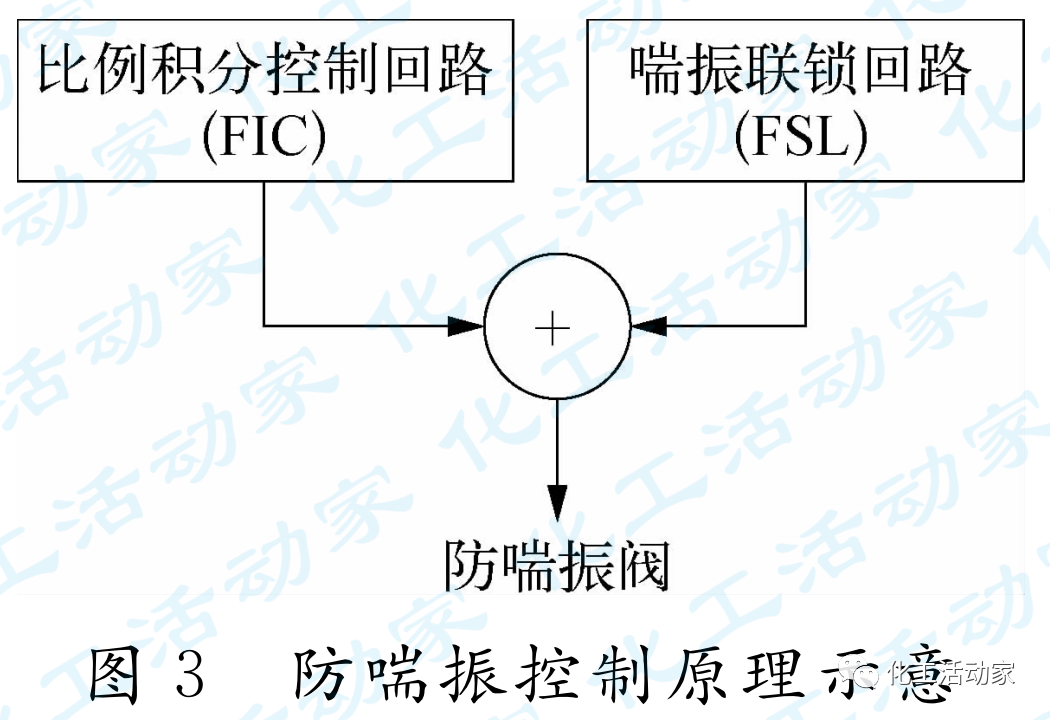
SLL的左侧为喘振区,右侧为压缩机的工作区,防喘振控制的作用就是保护或防止压缩机的工作点P进入喘振区。图1中的UIC为典型防喘振控制回路,防喘振控制器由两个功能组成,其基本原理如图3所示。
1)FIC为比例积分控制回路,SCL的值为该回路的给定值SP,计算如下所示:
SP=m(Δp)+ b
式中:m-SLL的斜率;b-SCL与SLL之间的偏移量。
2)FSL为喘振联锁回路,联锁设定值为STL线的值。当压缩机的工作点P向左移碰到SCL时,如果FIC的响应速度无法使P点回到SCL右侧,这时P点会继续左移直到碰到STL,该联锁触发一个阶跃信号快速打开防喘振阀。
随着数字化技术的发展,各压缩机控制系统厂家在上述功能的基础上发展出各种独特的控制算法,不仅提高了防喘振控制的调节精度和响应速度,还实现了防喘振控制、性能控制和转速控制及解耦控制。
02性能控制
性能控制的作用是通过上游或下游工艺要求来调节汽轮机的转速使压缩机的运行吻合工艺装置的负荷,性能控制的被控变量一般根据工艺装置的主要扰动量来选择,常用的被控变量有压缩机吸入压力、出口压力、出口流量。图1中的性能控制器PIC以压缩机吸入压力作为被控变量,与转速控制器SIC形成串级控制,性能控制的调节范围为汽轮机最小到最大工作转速。
由于多个防喘振控制回路之间,防喘振控制回路和性能控制回路之间相互影响,当工况变化剧烈时可能会导致压缩机运行不稳定,具有回路解耦功能的控制器会提高压缩机控制的稳定性。以图1为例,当防喘振控制增加回流量时,性能控制器需要增加其输出设定值到转速控制器提高转速,从而提高压缩机吸入能力。在该种情况下,解耦控制将提供一个从防喘振控制器到性能控制器的前馈功能,以增加性能控制器的输出。
03喘振检测系统
当防喘振控制功能失效时,喘振检测系统应能准确检测出压缩机的喘振,并发出信号快速打开防喘振阀或停压缩机。API670:2014并未强制要求离心压缩机设置喘振检测系统,但事实上大多数压缩机控制系统厂家已把该功能集成在防喘振控制内,虽然这样做并不满足API670:2014中喘振检测系统和喘振控制系统相互独立的要求。随着SIS的发展和普及,未来的趋势中该功能应独立于防喘振控制系统,或集成在SIS内。
蒸汽系统
抽汽凝汽式汽轮机蒸汽系统控制流程如图4所示。
01转速控制
该节讨论的转速控制是指启动程序结束后,控制范围从最小到最大工作转速。转速控制本质上是普通的PID控制回路,通过调节SV阀的开度来控制汽轮机的转速。根据API612:2014规定至少需要配置2个独立的转速探头用于转速控制。
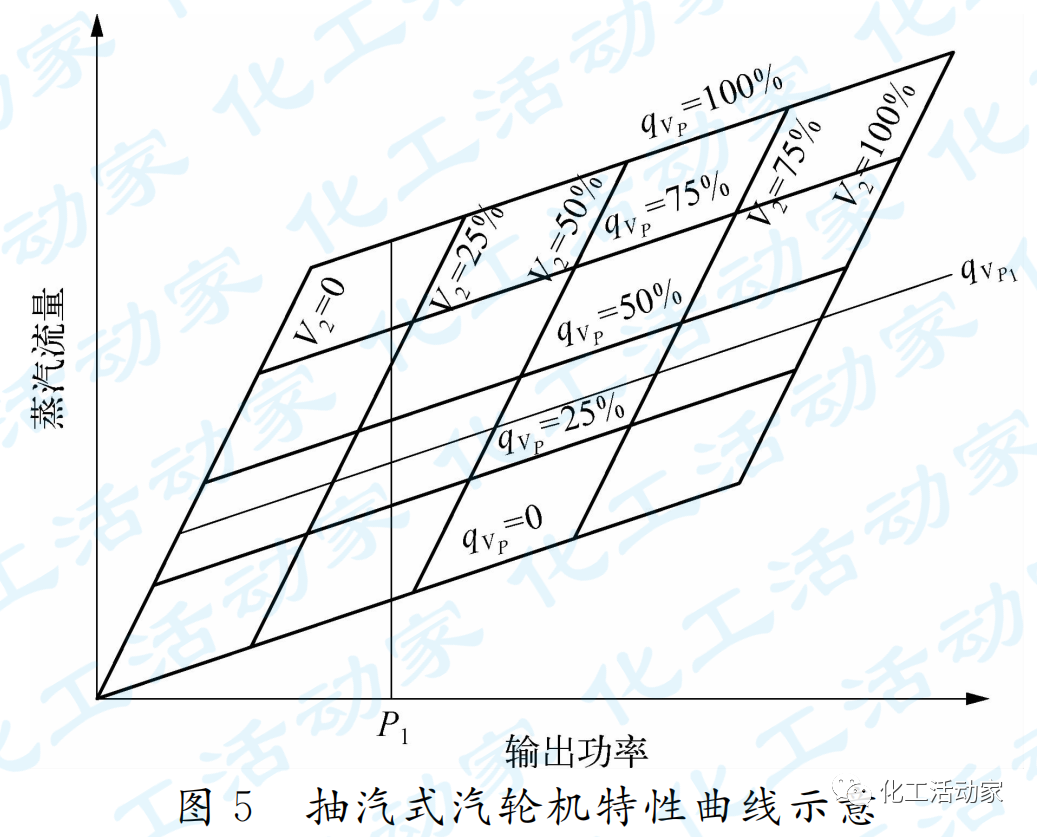
抽汽或补汽式汽轮机转速控制的情况要复杂的多,以下重点介绍抽汽式汽轮机的转速控制原理。典型的抽汽式汽轮机特性曲线如图5所示。
实际上抽汽阀EV是安装在汽轮机中段的机头上,为了便于理解才把汽轮机分成两段来表示。
当抽气阀EV的开度V2=100%时,蒸汽流量qVF与汽轮机输出功率P的关系分为两部分:第一部分为图5中的抽汽量qVP=0线,此时抽汽量为零,所有蒸汽流量都转换为汽轮机输出功率,qVP=0线的斜率为整个汽轮机的功率转换率;第二部分为图5中V2=100%线,此时汽轮机抽汽点的压力达到低压蒸汽管网压力,增加的流量值只通过汽轮机1级转换为输出功率,V2=100%线的斜率为汽轮机1级的功率转换率。
转速控制由转速控制SIC和抽汽压力控制PIC组成,SIC输出功率需求量(P1),PIC输出抽汽需求量(qVP1),根据汽轮机特性曲线可控制主调阀SV开度V1和抽汽阀EV开度V2。
02超速保护系统
当转速控制失效时,超速保护系统是汽轮机最后一道保护防线,API612:2014推荐其设定值为额定转速的116%。为降低共因失效,超速保护系统应独立设置或集成在SIS内,不应与一般过程控制共用硬件,特别是转速控制系统。
根据API670:2014规定超速保护系统需要配置3个独立的转速探头实现“2oo3”逻辑表决。
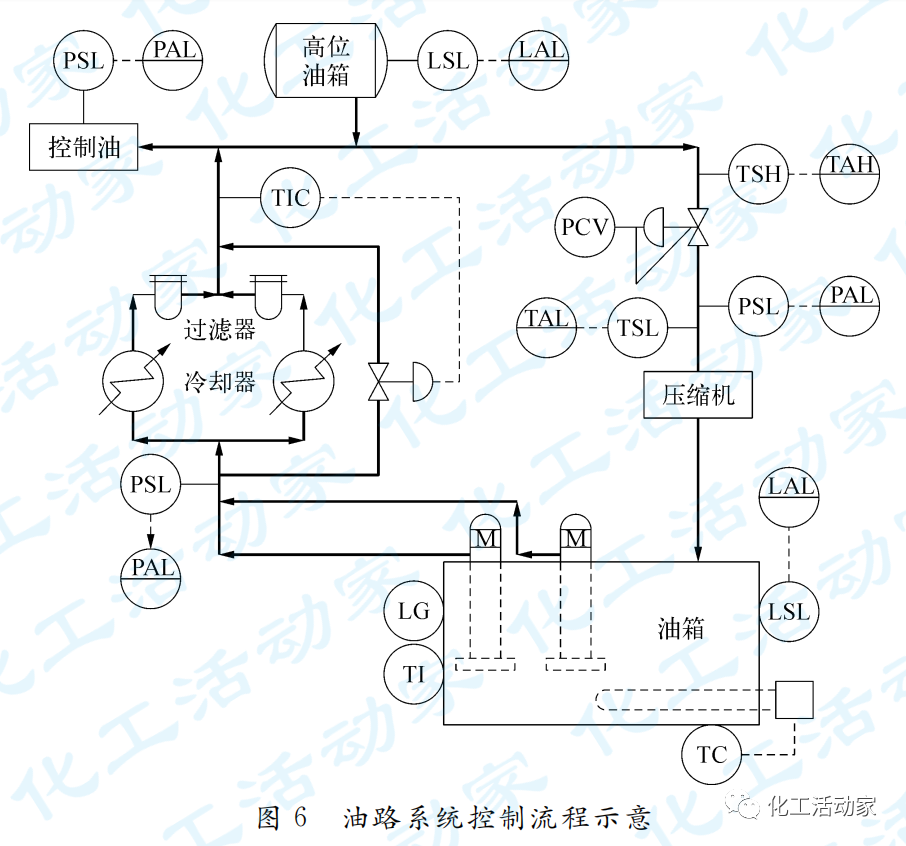
油路系统
油路系统主要由油箱、主油泵、辅助油泵、油冷却器、油过滤器、高位油箱、阀门、管路及仪表等部分组成。典型的油路系统控制流程如图6所示。
温度控制TIC和压力控制PCV保证润滑油的油温和油压维持在正常的操作范围内。为了维持机组连续运行,油站一般设置1台主油泵和1台辅油泵,当主油泵故障或油泵出口压力低时,自动启动辅油泵。
机械保护系统
在离心压缩机各种故障中最常碰到的就是振动问题,引起压缩机振动的因素很多,振动检测系统提供的振动数据对于分析机组故障原因起着至关重要的作用。根据API670:2014的要求,采用油膜润滑的支撑轴承或推力轴承的旋转设备传感器推荐配置,最低要求如下:
1)键相位。每台机组的驱动装置上应当安装一个非接触式电涡流传感器,用于相位基准测量。如果机组具有多个转速不同的旋转轴(例如通过齿轮箱传动的转动部件),则必须在每个不同转速的旋转轴设置一个相位测量。
2)轴振动。每个支撑轴承上应当安装2个非接触式电涡流振动传感器,2个传感器呈夹角90°安装,API670:2014推荐停车逻辑采用“2oo2”表决。
3)轴位移。每个滑动推力轴承上应当安装2个非接触式电涡流位移传感器,API670:2014推荐停车逻辑采用“2oo2”表决。
4)振动加速度。对于齿轮箱,除了应当在支撑轴承上安装电涡流传感器以外,还应当在齿轮箱外壳上安装1个振动加速度计式传感器,用于检测齿轮相关信息。
5)温度。每个支持轴承上应当安装2个温度传感器测量轴承金属温度,每个推力轴承的工作面和非工作面推力瓦上都应当安装温度传感器,API670:2014推荐停车逻辑采用“1oo1”表决。
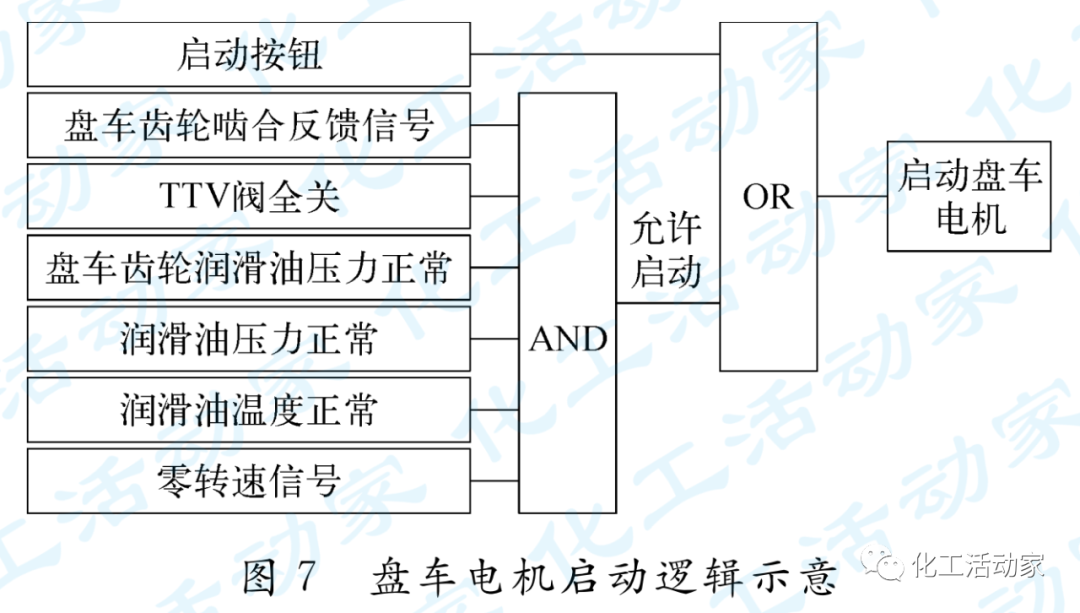
盘车装置
盘车装置的作用是在汽轮机启动前或停机后,驱动汽轮机低速转动从而减小上下汽缸温差,避免转子不均匀受热产生弯曲变形,同时还可在启动前检查汽轮机动静之间是否有摩擦及润滑系统工作是否正常。盘车装置的启动分为手动模式和自动模式,自动模式需要增设一个零转速探头以确保汽轮机完全停车的状态下自动启动盘车电机。典型手动启动盘车逻辑如图7所示。
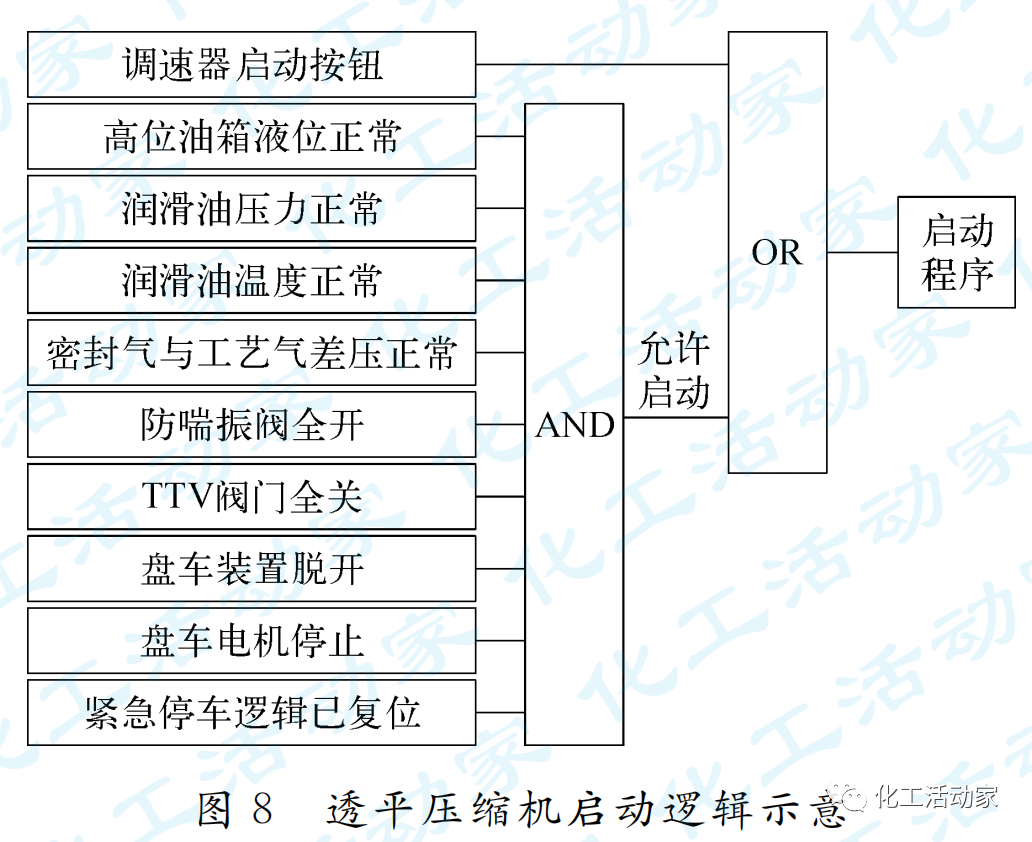
压缩机启动
典型透平压缩机启动逻辑如图8所示,不同机组的允许启动信号会略有增减。
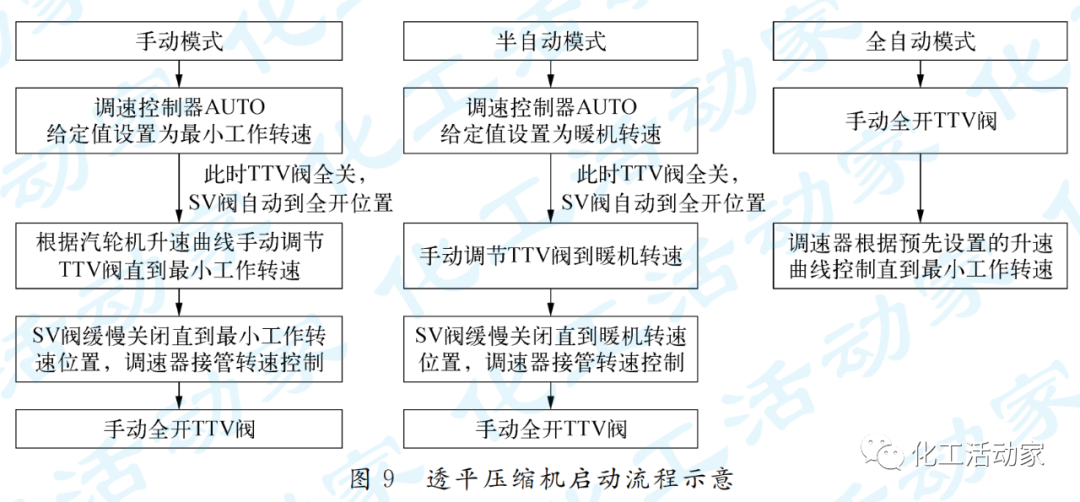
当压缩机允许条件全部满足后,可开始启动程序。常用的启动程序分为手动、半自动、全自动三种模式,详细操作流程如图9所示。
紧急停车系统
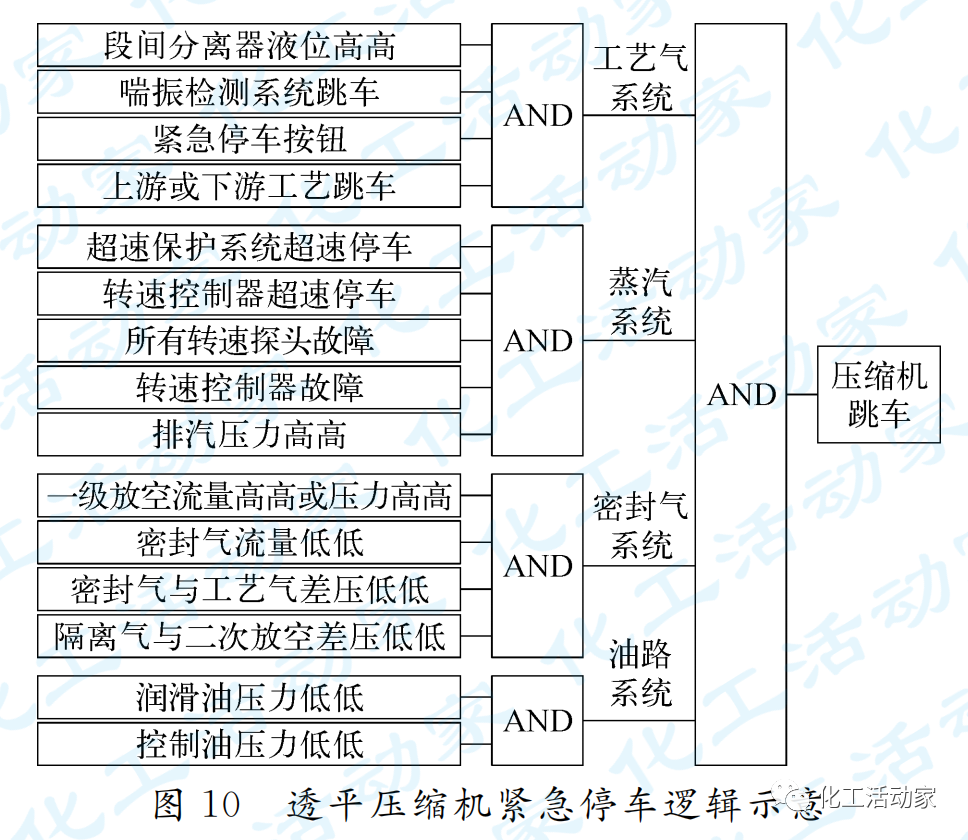
典型透平压缩机紧急停车逻辑如图10所示,不同机组的停车信号会略有增减。
控制系统方案
01传统ITCC方案
传统ITCC方案采用一套机组控制系统实现所有机组的控制和保护功能,其最大的优点是系统界面少、工程实施简单、维护方便。但随着用户对于安全仪表系统越来越重视,机组安全保护相关的SIF功能要求独立于一般过程控制回路,该方案已无法满足此类用户的需求。
02专用控制器方案
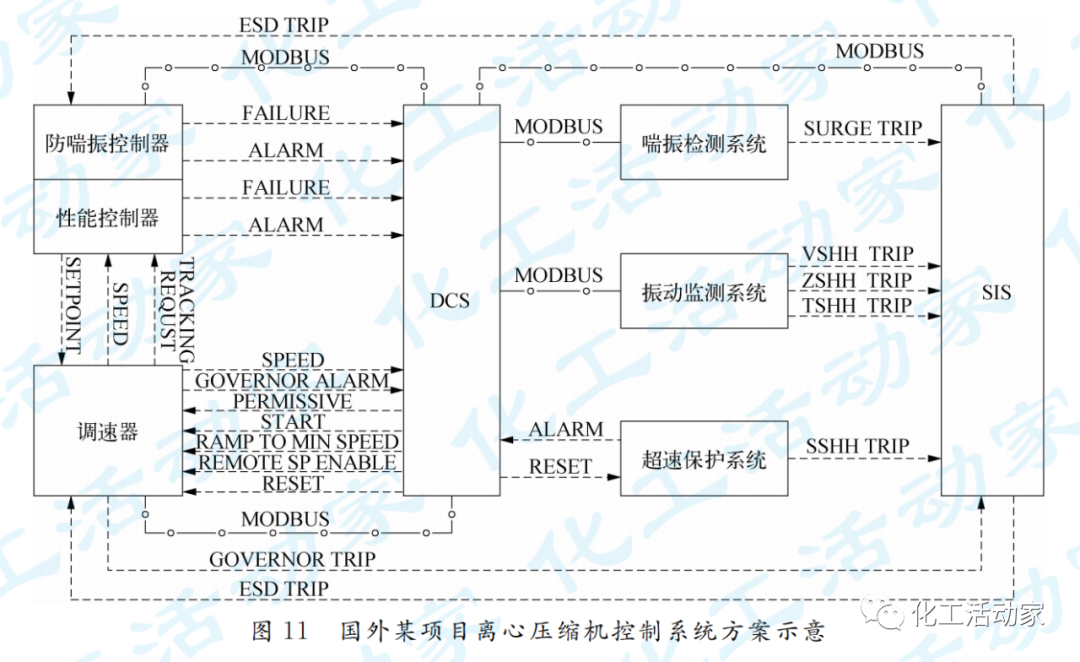
笔者参与设计的国外某总承包项目中,用户要求防喘振控制、性能控制、转速控制、超速保护、振动检测均采用专用的控制系统,机组其他部分的检测和控制利用工艺装置的DCS实现,机组安全相关的保护功能利用工艺装置SIL认证的SIS实现。该方案不仅完全满足控制和安全保护功能相互独立的要求,并且专用控制器先进的算法保证了压缩机高效稳定地运行,机组部分的检测、控制和操作与工艺装置采用统一的DCS操作界面。该项目离心压缩机控制系统方案如图11所示。
该方案的缺点是各个系统之间的来往的信号线比较多,实施难度较大,要求设计者和用户对于压缩机控制有一定程度的理解,协调好各系统之间的控制需求。
03优化版ITCC方案
该方案从传统的ITCC方案改进而来,机组所有检测、控制功能和操作利用ITCC实现,机组安全相关的保护功能从原来ITCC改到SIS实现。该方案同样满足控制和安全保护功能相互独立的要求,但系统之间界面要较专用控制器方案少很多,工程实施和传统的ITCC没有大的区别。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020