















































软件

产品


本文通过Adams完成管路机器人建模及仿真,使其可以沿不同管径的管路运动前进,从而实现管路的检查及清理。
1.模型的建立
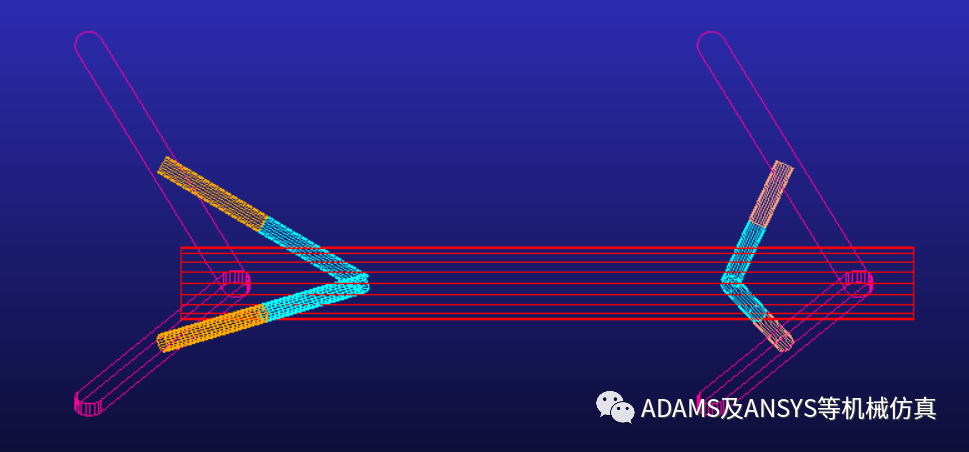
管路机器人主要是根据管路管径的变化,调整支腿的姿态,使支腿时刻紧贴管内壁,然后实现前移。管理机器人的具体结构如下:
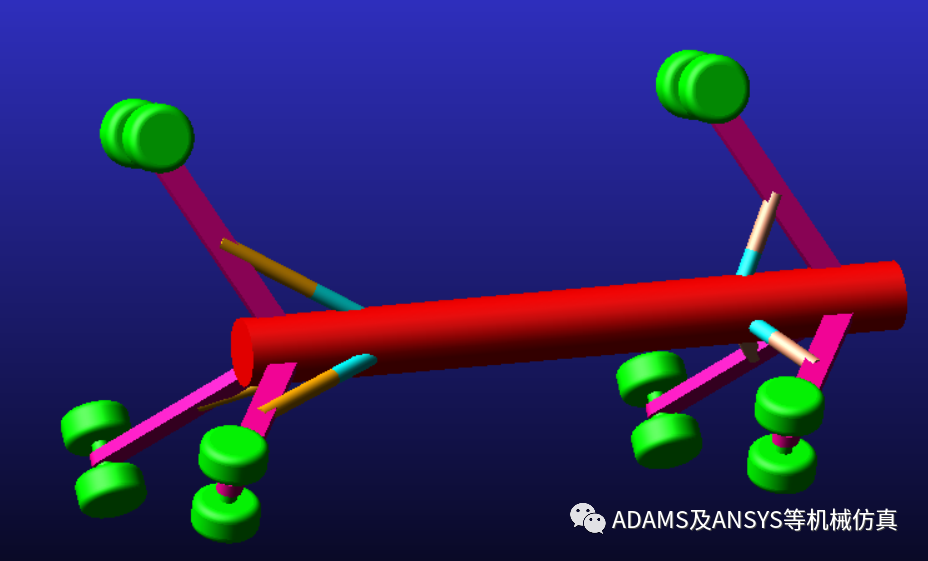
如上图,机器人主要由前后各三个支腿组成,支腿边缘各有一个驱动轮,同时为了使支腿实现运动以适应管壁,在支腿侧边添加可伸缩斜支撑。
①支腿的建立
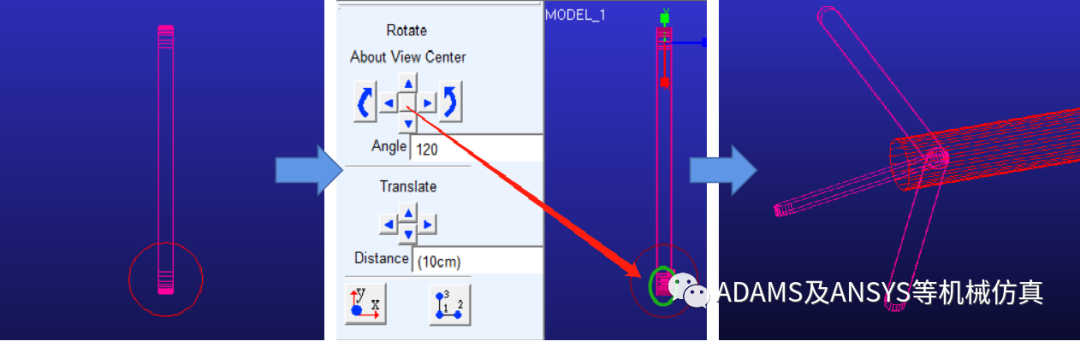
首先在机器人body后侧建立一个倾斜的支腿(便于后面适应管径),然后复 制、旋转120°建立三个同样的支腿,具体如下:
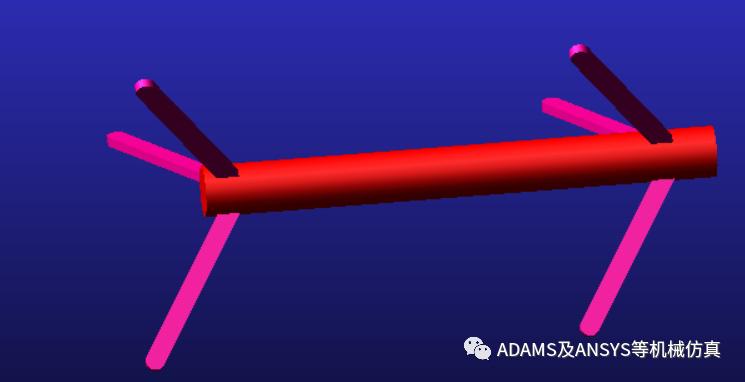
同理在前侧也建立3个倾斜的支腿,完成后如下所示:
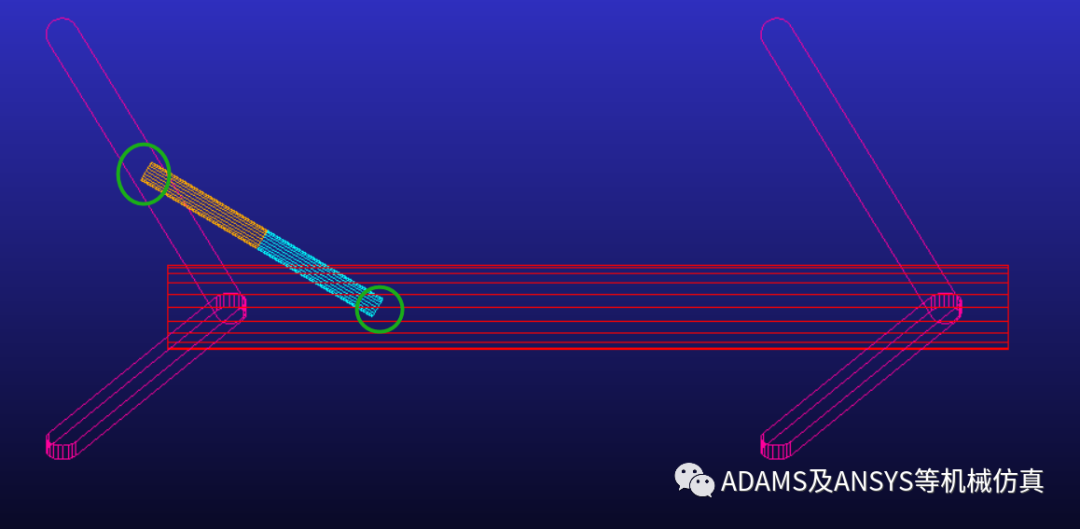
②伸缩支撑的建立
在支腿和机器人主体之间建立两个连杆,具体如下图,同理也在其他支腿上建立斜支撑:
③驱动轮的建立
和上文采用同样复 制旋转的方法在支腿边缘共建立六个驱动轮:
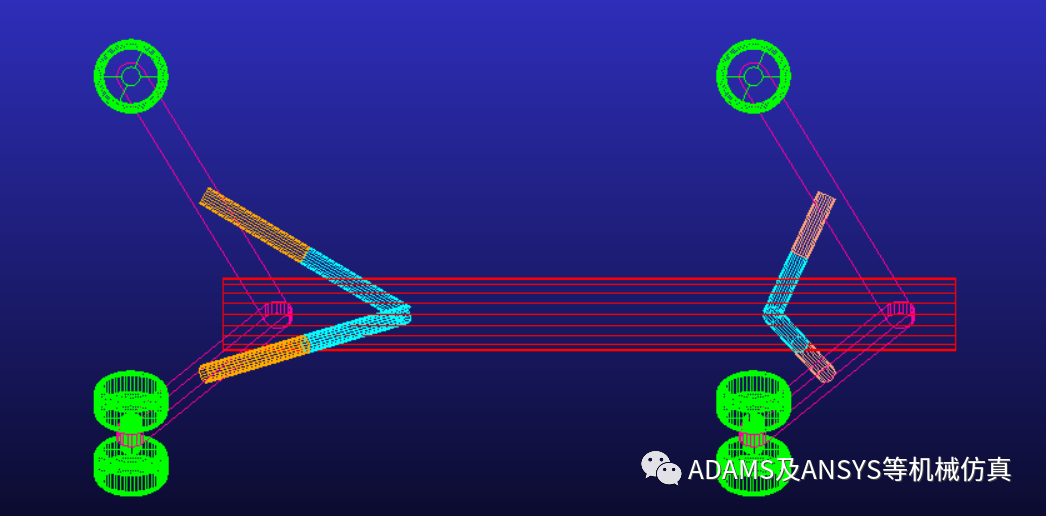
④约束副的建立
如下所示,驱动轮与支腿之间建立旋转副,支腿与主体建立旋转副,两个伸缩支撑分别与支腿、主体建立球副,伸缩支撑之间建立移动副。

⑤驱动的建立
在每个驱动轮上建立一个10s10圈的驱动函数(数值的大小可以根据需要设置):

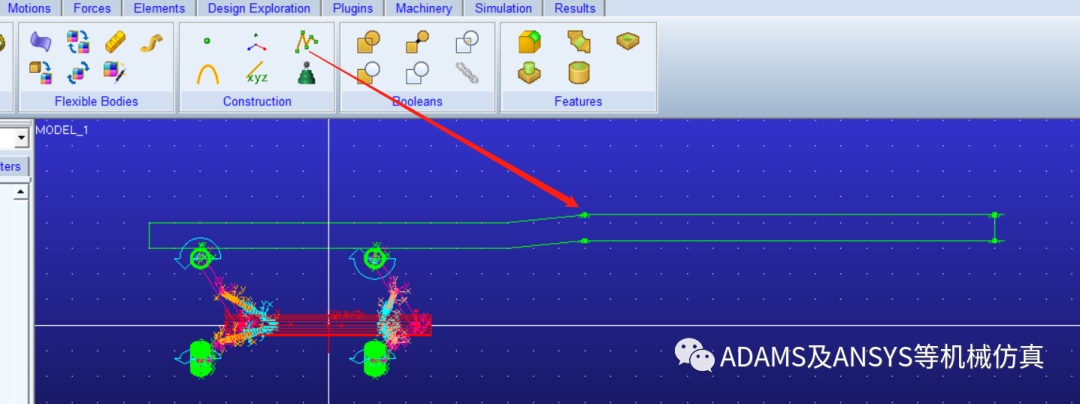
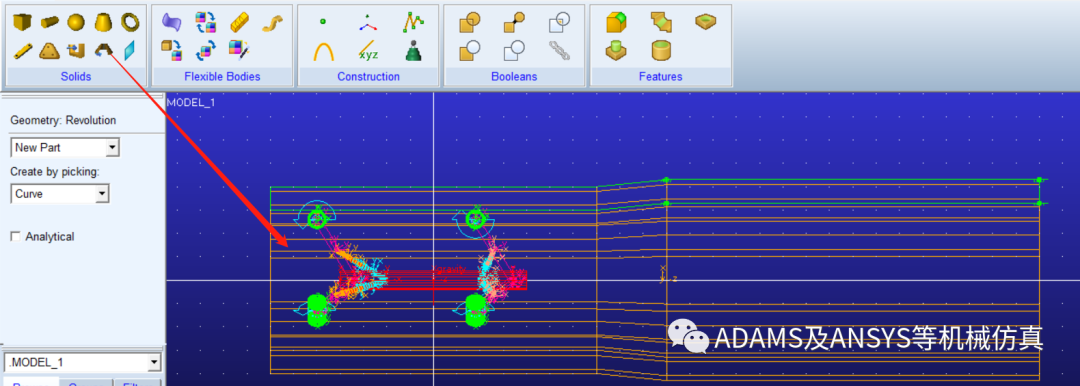
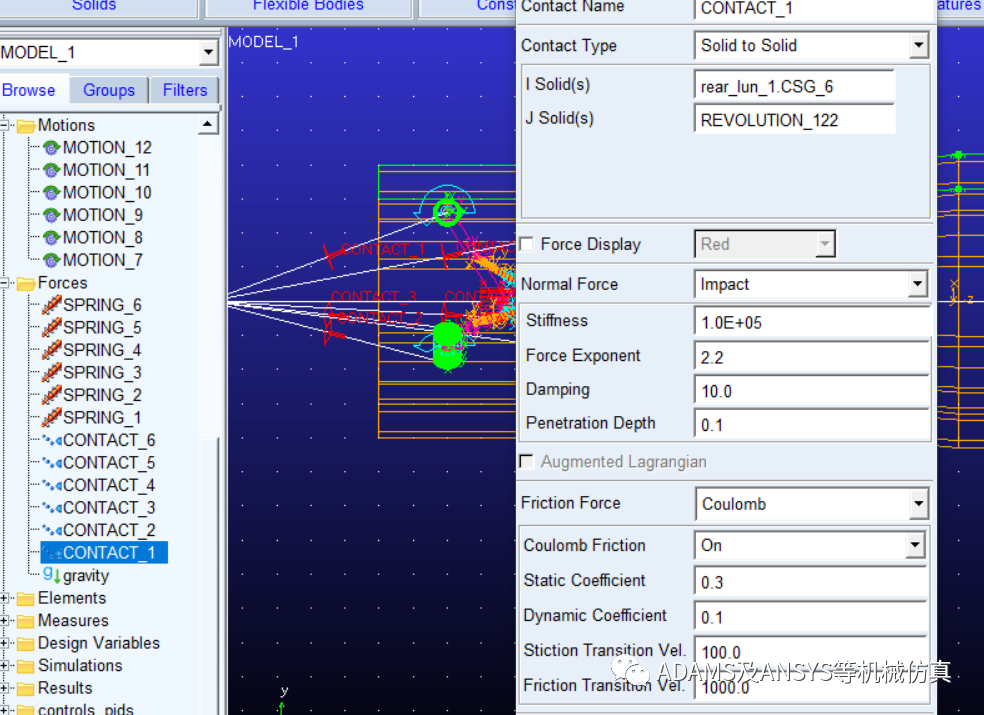
⑥建立管路及接触
首先建立不同管径管路的轮廓,然后基于轮廓进行旋转就可生成管路:
然后在驱动轮与管路之间建立接触(接触中要添加摩擦,否则不会机器人不会前进):
2.变径适应的设置
机器人需要根据不同的管径进行调整,本文主要介绍两种调节方法:一个是被动调节,一个是主动调节。
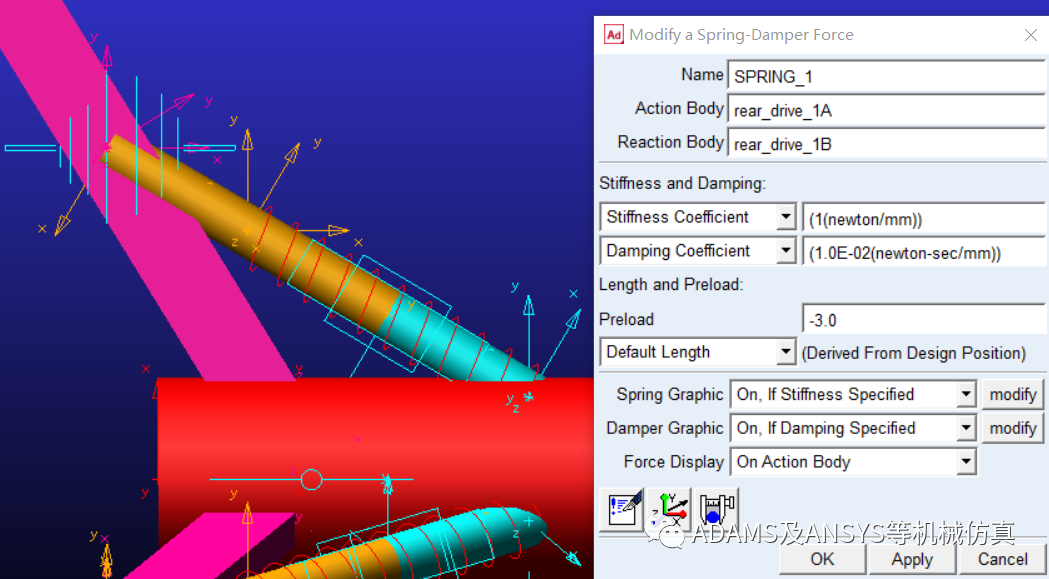
①被动调节
被动调节的原理主要是通过添加具有预载的弹簧,在Preload处加一个负的载荷,表示弹簧此时被压缩,相当于在初始时刻弹簧压缩,驱动轮紧贴在管壁内径上:
经过仿真,仿真动画如下所示:

②主动调节
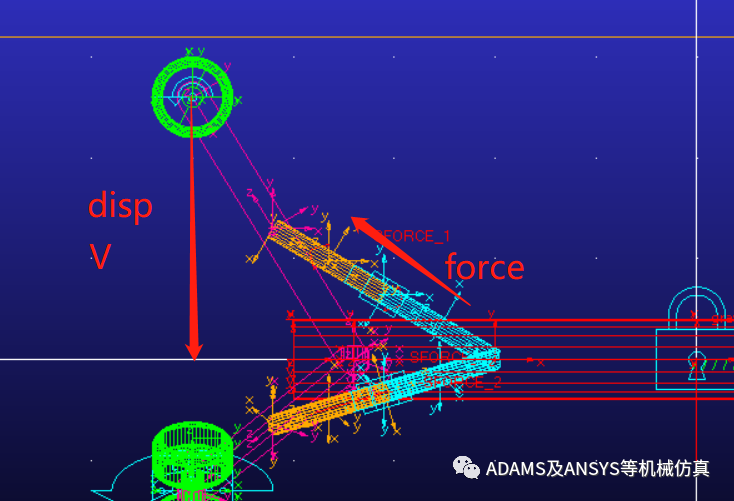
主动调节的原理主要是应用PID控制,具体原理为:将上文中的弹簧换成单向力,然后建立PID控制force的大小。PID控制系统的输入为驱动轮轮心到机器人body中心的距离以及驱动轮轮心的速度:
具体设置如下:
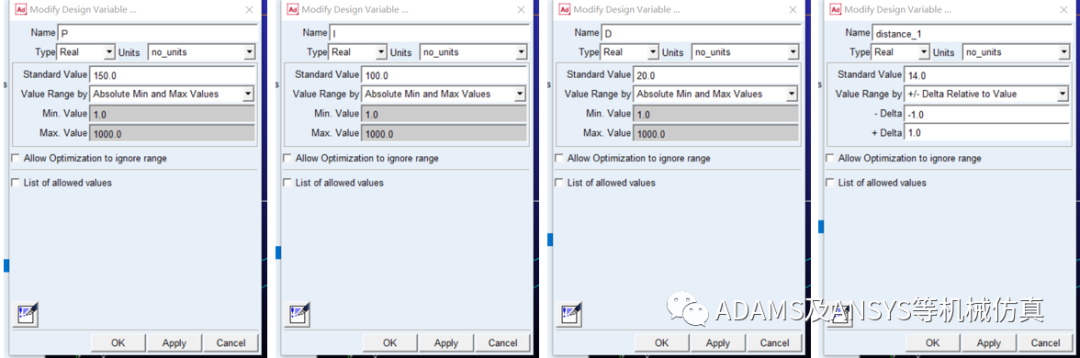
a.建立变量:
建立P、I、D变量以及驱动轮轮心到机器人中心的距离(管径不同,这个距离不同)。
b.建立控制PID控制系统的输入及PID:
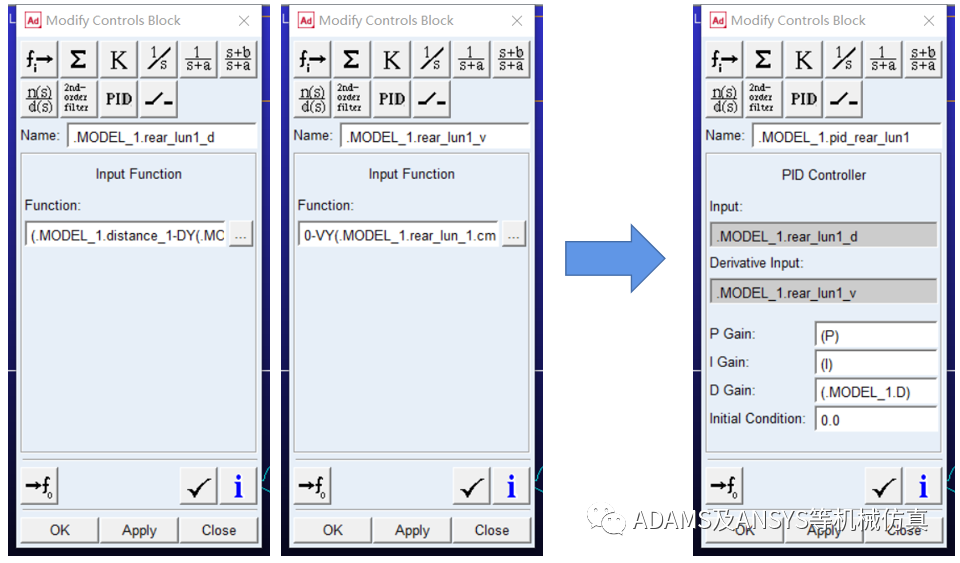
c.将PID控制作为单向力载荷的输入
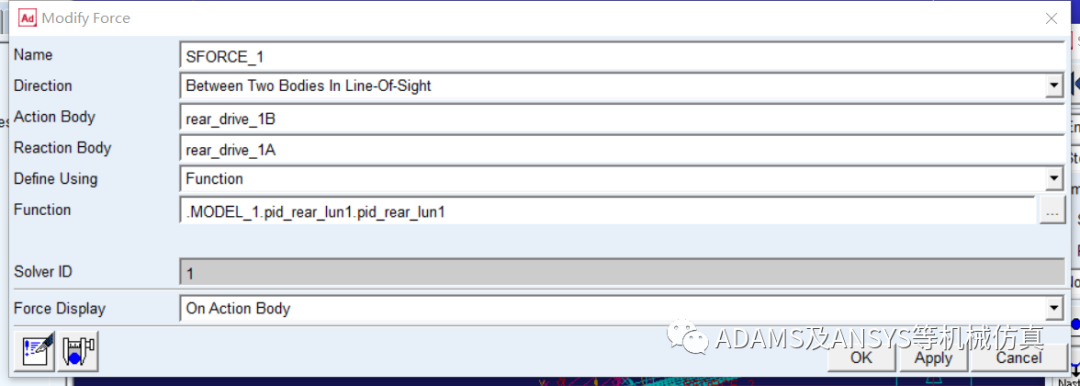
经过仿真如下:

从上图可以看出,经过PID控制,驱动轮到达指定的距离与管壁接触。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















