















































软件

产品


对于软件连接用三菱plc控制ug运动
UG12(及以上版本才具有机电概念设计模块)
MX OPC Server 6.04软件
GX Works2
将刚体、运动副、位置控制等添加好。不会添加的在评论区写出,我找时间单独写一篇。
在信号上右键选创建机电对象—信号,

弹出“信号”窗口参数选择“定位”就可以控制移动副的移动,名称可以随便取方便理解就行。
在上面选择信号时有另一个是信号适配器,可以将运动参数保存在ug里,以下给出一个参考
当“圆柱挡板1c”为真时,圆柱挡板1的定位参数就会变成-13,否则为0。这个信号就是从PLC传入的在后面步骤中再讲。
选用Q系列的cpu,我试过FX系列的不能写复杂程序连接ug。
sfc方式编程
编程就按照自己需要的步骤进行编程,具体的程序需要具体学习,如有需要可在评论区留言,我另外写一篇关于这个的。主要注意的就是使用Q系列CPU。
打开MX OPC,新建一个项目名字随意取,按照下图新建一个Device。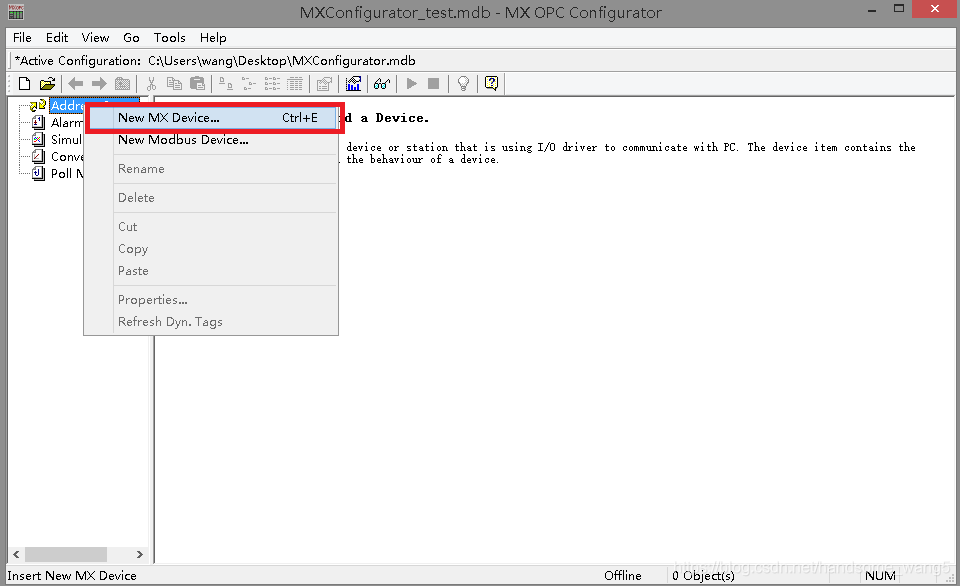
在弹出的窗口点击Configure,弹出新窗口PC选择图中这个。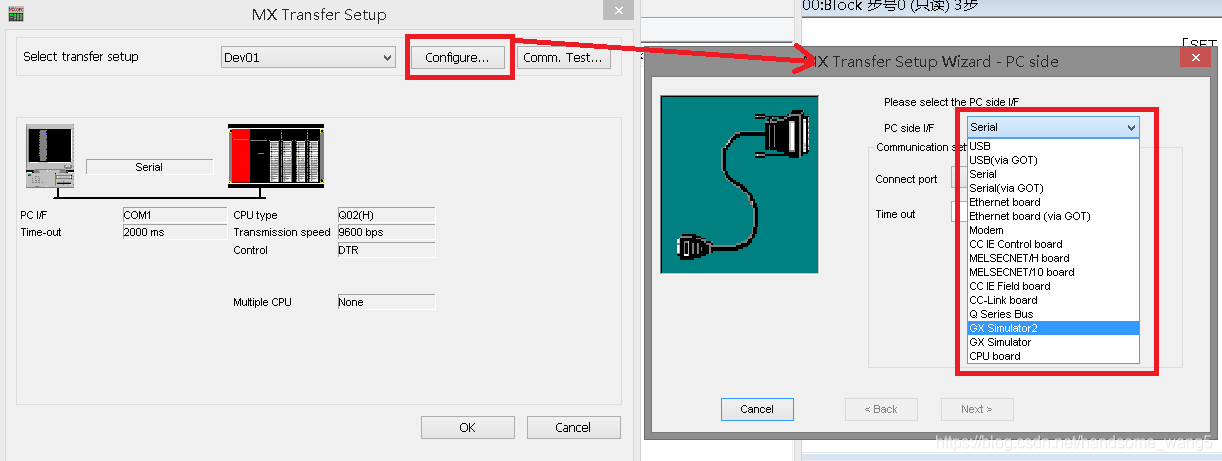
然后运行GX Works2的程序,仿真运行成功后点击图中的Browse按钮会出现新窗口选择对应的程序后点击OK。然后一路按确定就行了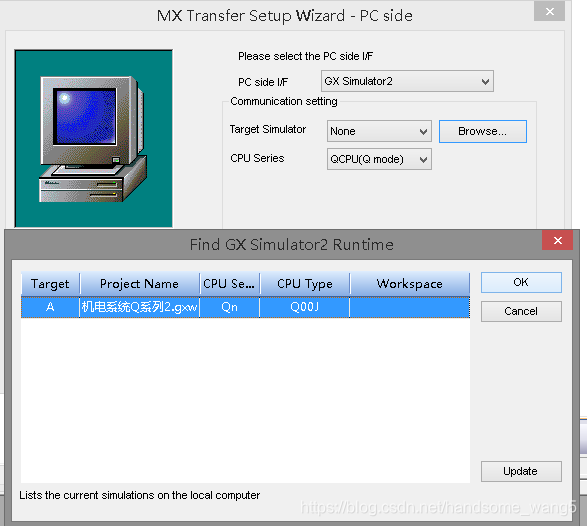
然后再图中位置右键,创建对应的数据点。
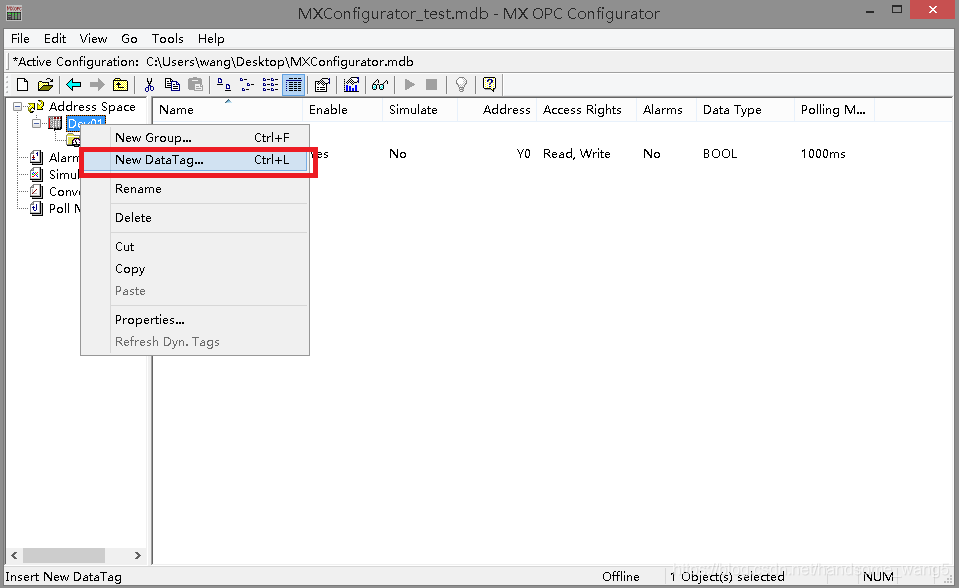

产生相对应的Y0,这个Y0就是连接到PLC的Y0,OPC运行后就可以实时获取PLC中Y0的状态。至此完成了plc连接OPC。
接下来连接OPC和UG。
OPC点击运行按钮和监视按钮,即蓝色方框的两个按钮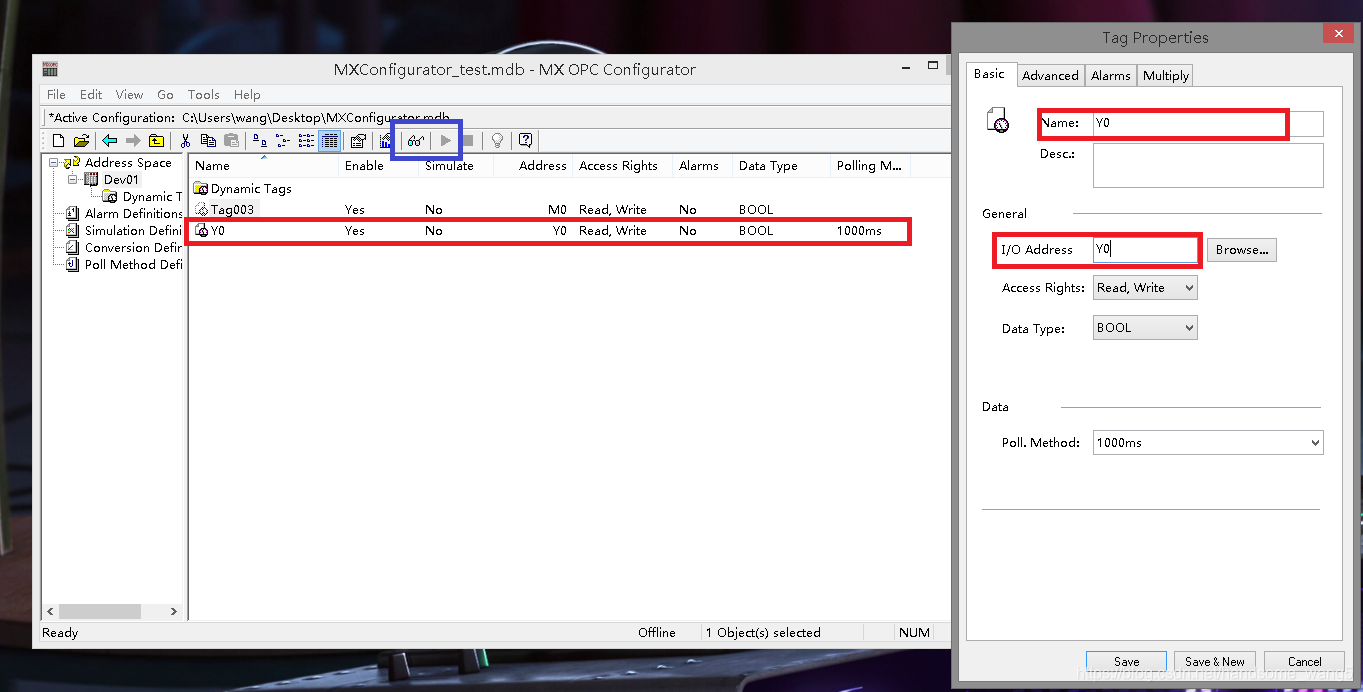
打开ug按图中方式选择好服务器,勾选对应的变量参数点击确定。这时候UG就将OPC的参数读取进来了。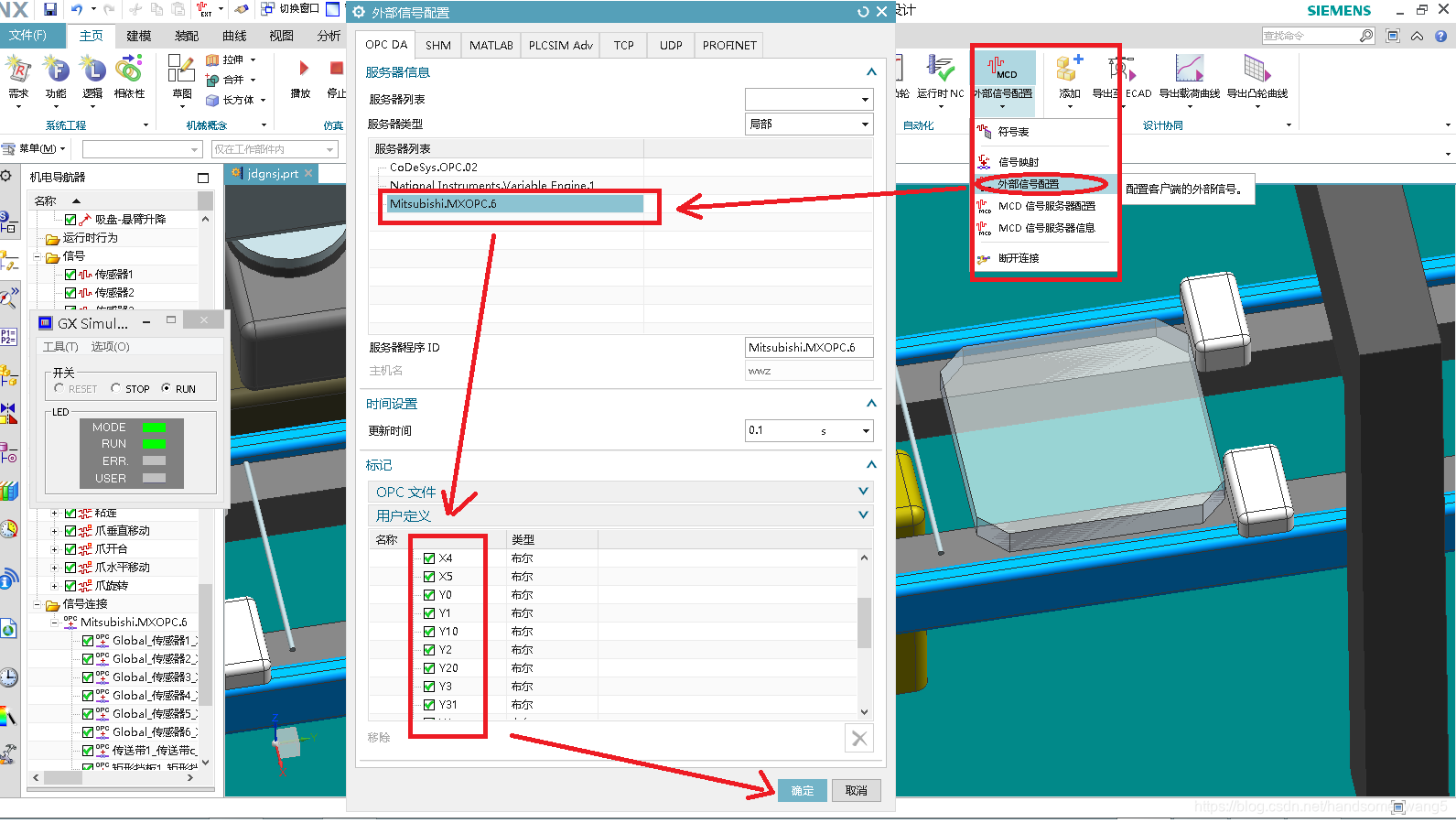
读取后有将对应的信号进行连接,如图打开“信号映射”,弹出新窗口。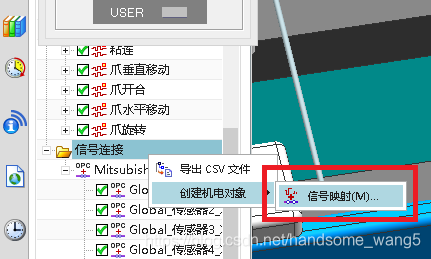
选择左右对应的信号,左边的MCD信号就是UG里建立的信号,右边外部信号就是OPC服务器读取的信号。点击中间蓝色方框就可以连接起来,在下面就会产生映射。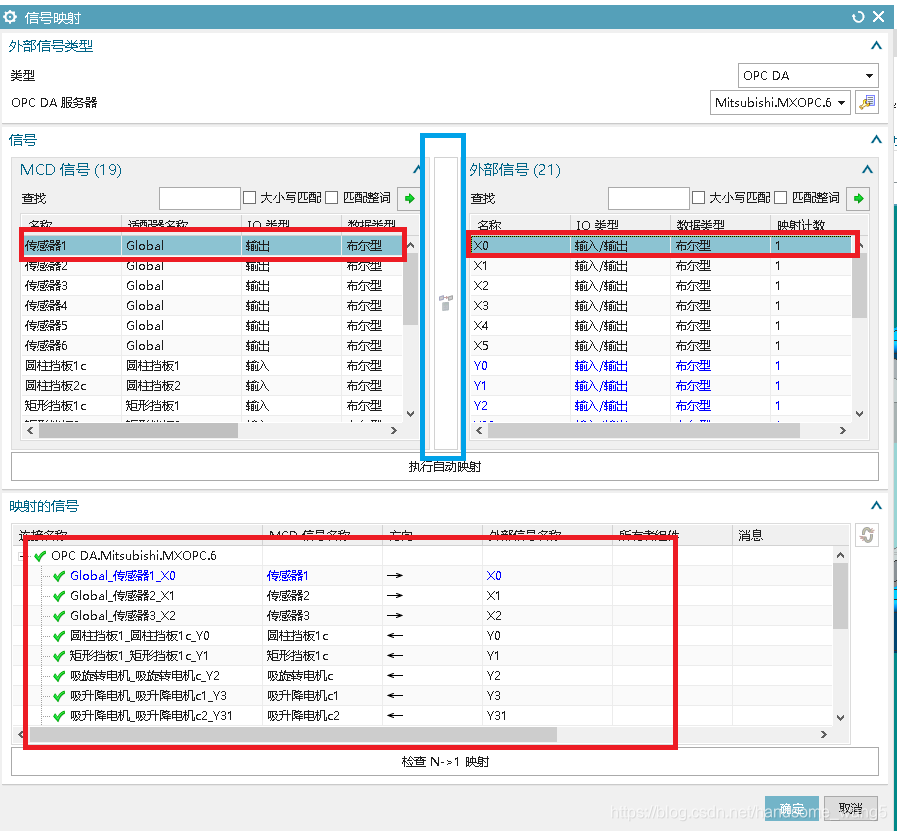
至此就完成了OPC和UG的通信。
需要按顺序启动三个软件,首先启动PLC仿真运行,等待启动成功后再启动OPC进行连接查看监视器是否成功监视,最后点击UG的播放按钮。如果UG没有设置触发条件就手动在PLC程序里触发。
对于上述过程有什么不懂的可以在评论区留言,如果本文对你有帮助请点个赞吧!
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















