















































软件

产品


题目:
DynaSLAM II:Tightly-Coupled Multi-Object Tracking and SLAM
DynaSLAM II:紧耦合多目标跟踪与SLAM
论文地址:
https://arxiv.org/pdf/2010.07820.pdf
发表期刊:
IEEE Robotics and Automation Letters ( Volume: 6, Issue: 3, July 2021)
开源代码
https://github.com/BertaBescos/DynaSLAM
xxxx
本文DynaSLAM II,一种面向立体和RGB-D配置的视觉SLAM系统,紧密集成了多目标跟踪能力。DynaSLAM II利用实例 语义分割 和ORB特征对动态对象进行跟踪。静态场景和动态对象的结构在一个新的束调整建议中与相机和移动智能体的轨迹联合优化。对象的3D边界框也在固定的时间窗口内进行估计和松散优化。实验证明,跟踪动态目标不仅为场景理解提供丰富的线索,而且有利于摄像机跟踪。
DynaSLAM II是一款面向动态环境的开源立体和RGB-D SLAM系统,可同时估计相机、 地图 和场景移动对象的轨迹。提出了一种束平差解决方案,在局部时间窗口内紧密优化场景结构、相机姿态和物体轨迹。物体的边界框还以一种解耦的公式进行优化,允许估计物体的尺寸和6自由度姿态,而不与任何特定的用例挂钩。
本文使用一种紧耦合的捆绑平差公式,其中包含相机、物体和点之间的新测量,特别注意其计算复杂性和涉及的参数数量,而不引入硬编码先验。为此,将实例语义先验与稀疏图像特征相结合。这种公式允许以较低的计算成本对相机、地图结构和动态对象进行互利的估计。另一方面,现有的部分文献侧重于动态对象的点云结构估计以及随机对象参考[12]、[13]、[25]的轨迹估计,而另一部分文献则试图寻找同类对象的共同参考以及信息量更丰富的占用量[10]、[11]。我们打算独立地执行这两项任务,以便充分利用两者的好处,而不遭受它们的缺点。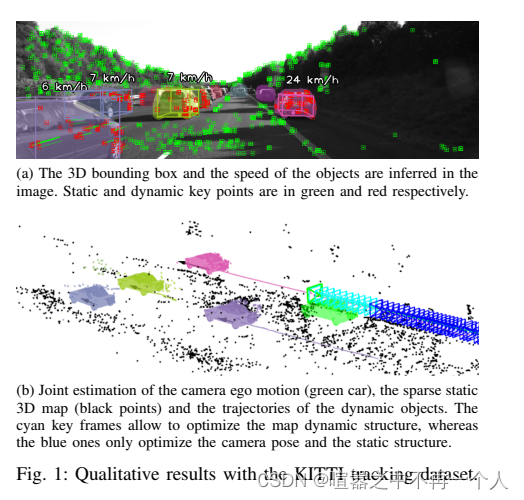
本文提出了一种物体级SLAM系统,具有相机、物体和3D地图点之间的新测量功能。这使我们能够跟踪动态对象,并紧密优化自身和环境的轨迹,使两种估计都是互利的。将目标跟踪问题与边界框估计问题解耦,与其他工作不同,对目标的运动、姿态或 模型 不做任何假设。实验结果表明,DynaSLAM II在实时性能上达到了最先进的精度,该框架适用于大量的应用。系统基于特征的核心限制了它发现精确3D边界框的能力,也限制了它跟踪低纹理物体的能力。充分利用密集的视觉信息肯定会将这些限制向前推进。我们还想探索更具有挑战性的任务,即仅使用单目相机的多目标跟踪和SLAM。这是一个有趣的方向,因为动态目标跟踪可以提供关于地图比例的丰富线索。
该文章在第一版本之后提出了目标跟踪算法,也验证了我前面提出来的想法,单纯的动态目标点剔除必然是对SLAM系统不利的。最近很多的论文都在研究动态静态关联处理的方法。看来这也是一个趋势,但是我个人的看法而言,SLAM系统太过杂糅反而不太好,能用最简单的 算力 解决定位的问题,那么建图也就随之变得简单了。虽然建图和定位是一个关联的问题,但是,可以有不同的处理方式。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















