













































产品
 著作权
著作权

导读:刚体动力学分析(主要用来计算刚性系统结构的动态响应)以及瞬态动力学分析(用来确定系统结构能否经受住随时间变化载荷作用的一种动态响应分析方法),都会在分析过程中涉及机构运动的运动副和弹簧等进行连接创建,例如通用机械传动、机器人机构的特性分析。
本文针对ANSYS Mechanical创建刚体动力学和瞬态动力学分析所需Jiont连接工具进行介绍,另外也对于如何提取运动载荷Motion Load方法进行简要说明。
具体内容如下:
① 机构连接设置:运动副
② 其他连接工具:弹簧、接触关系、约束方程
③ 刚体动力学提取运动载荷Motion Load方法
④ 运动载荷导入静力学分析
限于笔者水平,错误必然很多。严禁直接套用于企业产品分析使用,以免造成重大事故和不必要的财产损失。仅作为同自己一样的自学、初学者交流学习作用。
一、运动副
运动副可以定义为两个构件直接接触并能产生一定相对运动的可动连接,是建立机构运动重要的方法,只要简单了解《机械原理》教材中关于运动副的基本说明,就能容易的确定机构零件之间的相对运动关系。
按照运动副接触形式分类可以分为低副(面和面接触,低副包括转动副,移动副。)和高副(点或线接触的运动副,例如有车轮与钢轨,凸轮与从动件,齿轮传动等)。按照接触部分的几何形状或者相对运动空间又可以分为圆柱副、平面与平面副、球面副、螺旋副等。常见运动副机构简图如图1所示。
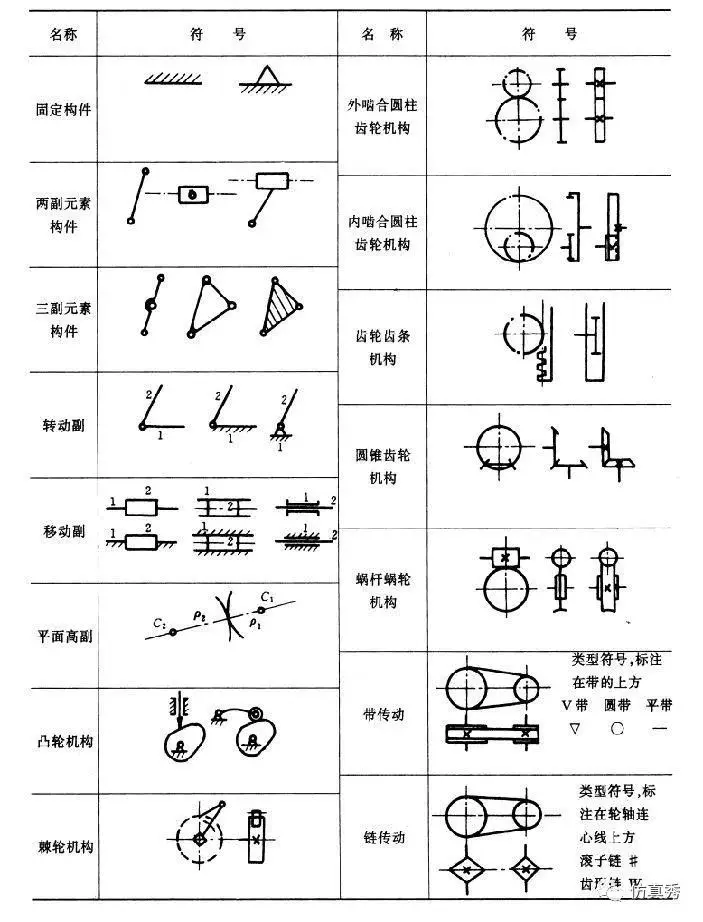
图1
二、ANSYS Mechanical运动副
1、ANSYS Mechanical运动副基本类型
ANSYS Mechanical运动副自由度的约束与释放是以参考坐标系为基础建立的。各运动副关系示意如图2所示。
从上而下从左至右依次为:
① Fixed Joint(固定副):约束全部自由度。
② Revolute Joint(铰接副):放松ROTZ自由度,约束其他全部。
③ Cylindrical Joint(圆柱副):放松UZ和ROTZ自由度,约束其他全部。
④ Translational Joint(移动副):放松UZ自由度,约束其他全部。
⑤ Slot Joint(狭槽副):约束UY、UZ自由度,放松其他全部。
⑥ Universal Joint(万向节):约束ROTX、ROTZ自由度,放松其他全部。
⑦ Spherical Joint(球副):约束X、Y、Z自由度,放松其他全部。
⑧ Planar Joint(平面副):约束UZ、ROTX、ROTY自由度,放松其他全部。
⑨ General Joint(通用副):自定义上述自由度。
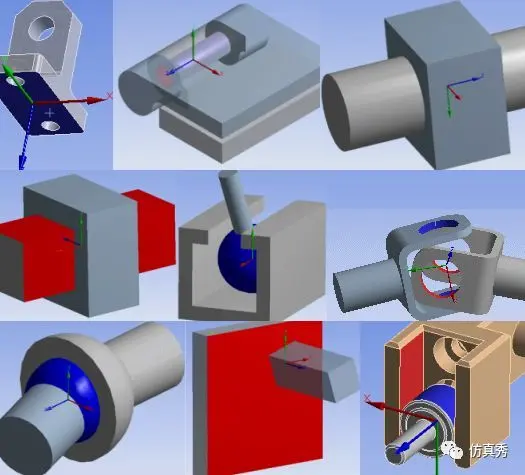
图2
2、自由度限制说明
如图3所示,以General Joint(通用副)的自由度限制为例进行说明:灰色的图标X、Z、RX、RY表明自由度被限制,而有颜色的Y、RZ表明自由度没有被约束。
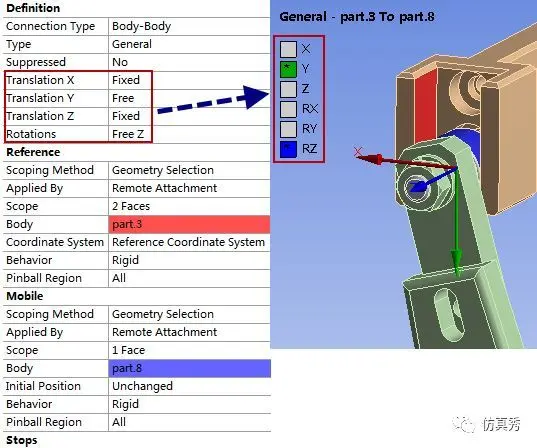
图3
3、几种运动副创建方法说明
(复制以下链接到浏览器打开,阅读完整全文)
https://www.fangzhenxiu.com/post/6420/?inviteCode=z3cyn52KaDHYS
相关阅读推荐:
《ANSYS Mechanical联合ANSYS nCode DesignLife 在实体焊缝疲劳分析中的应用》
https://www.fangzhenxiu.com/post/1069/?inviteCode=z3cyn52KaDHYS
 技术文档
技术文档
 热门文章
热门文章


 155-2731-8020
155-2731-8020

























