















































软件

产品


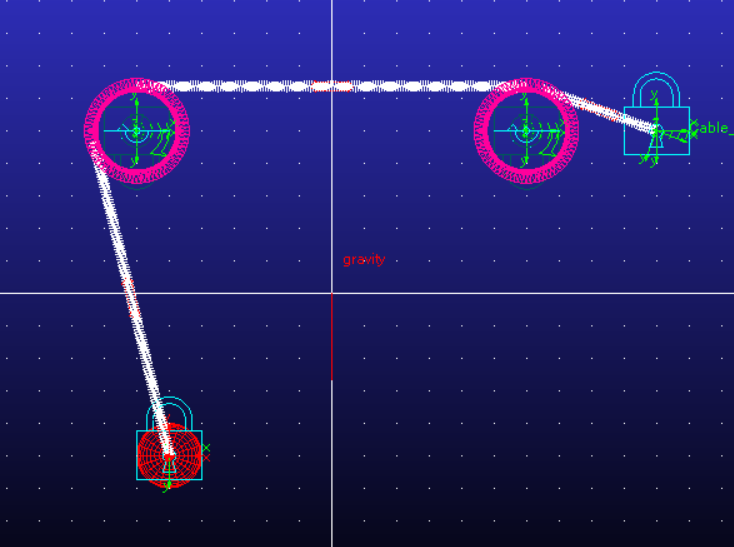
首先建立一个part球当做重物,然后建立两个marker点(暗色)选择两个滑轮位置。再一个marker(亮色)点做一端锚点。
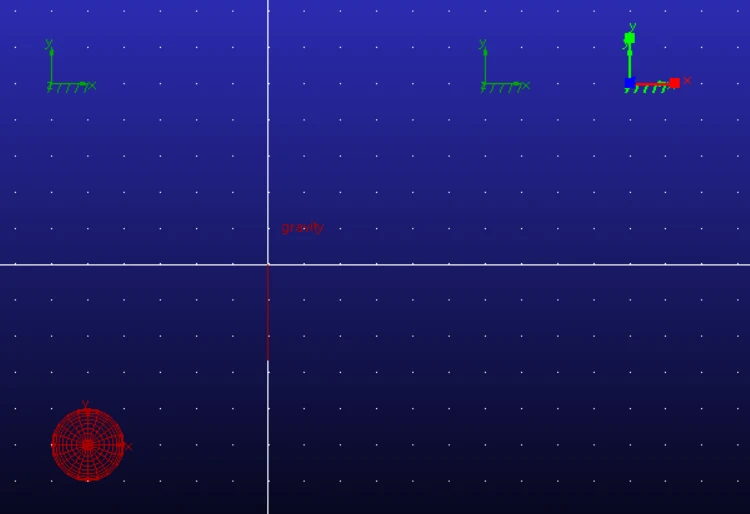
位置安排
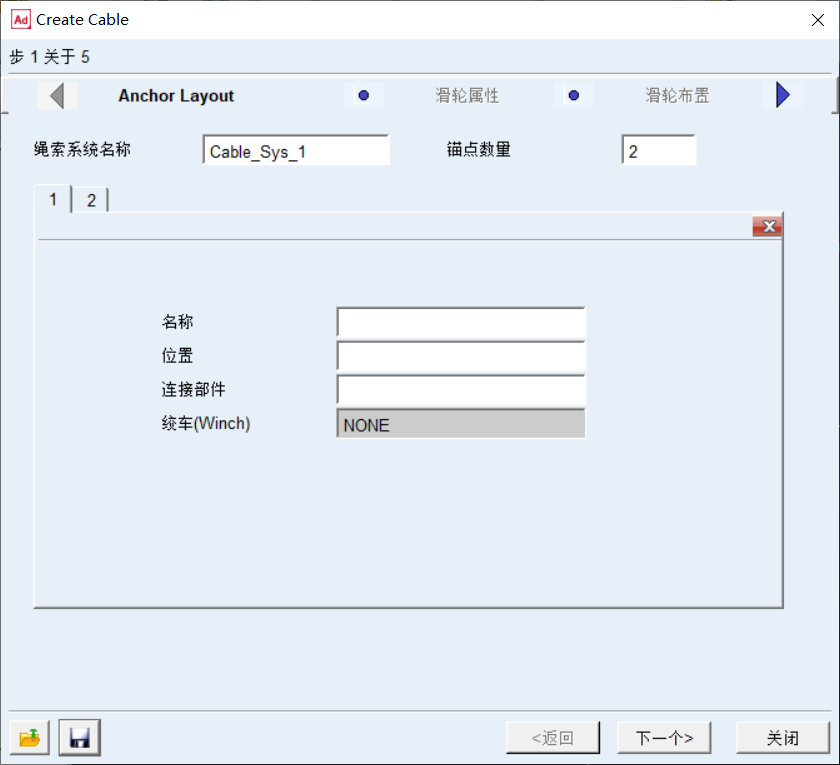
点开“cable”,
锚点选择两个,名称随便起;位置一个选择球的中心,另一个选择最右边的marker;连接部件一个选球,一个选择ground。
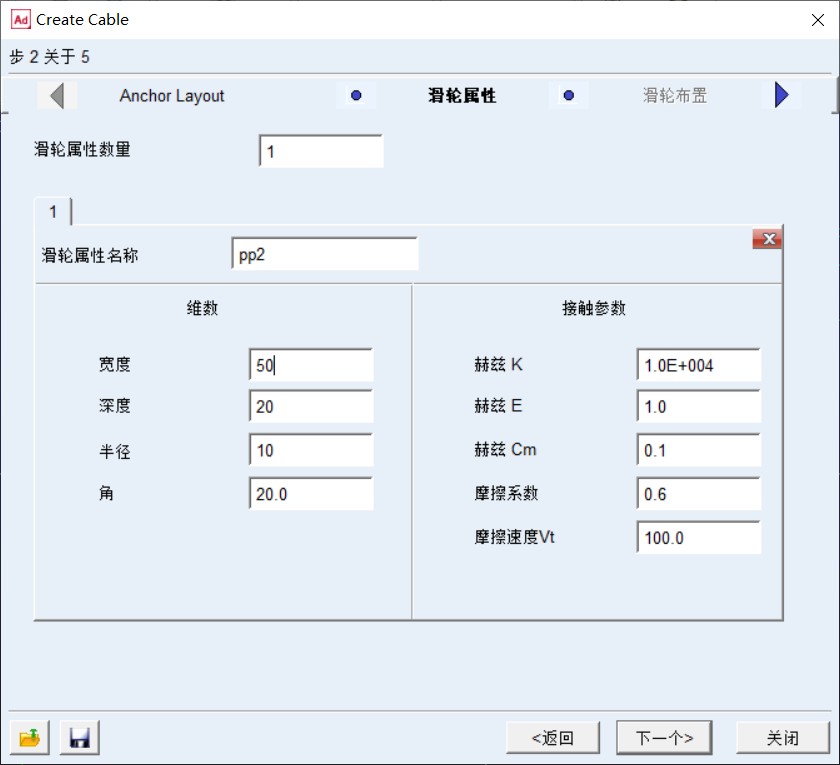
滑轮属性是指滑轮的截面属性和一些接触性质,只设置截面属性,接触属性比较复杂,没搞懂。
一个绳索的话应该就是一种滑轮类型,取1;名字随便起;维数里面的根据单位初步设置一下,这里系统单位是mm,50mm是5cm,差不多合适的样子。
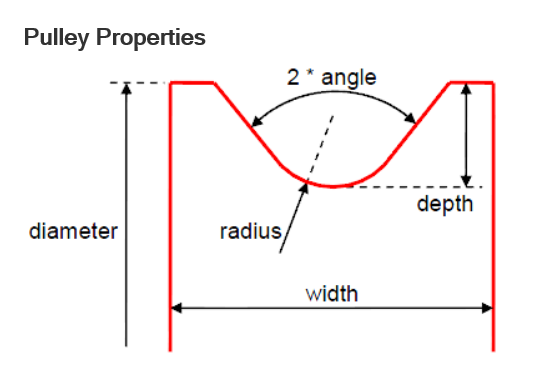
截面属性
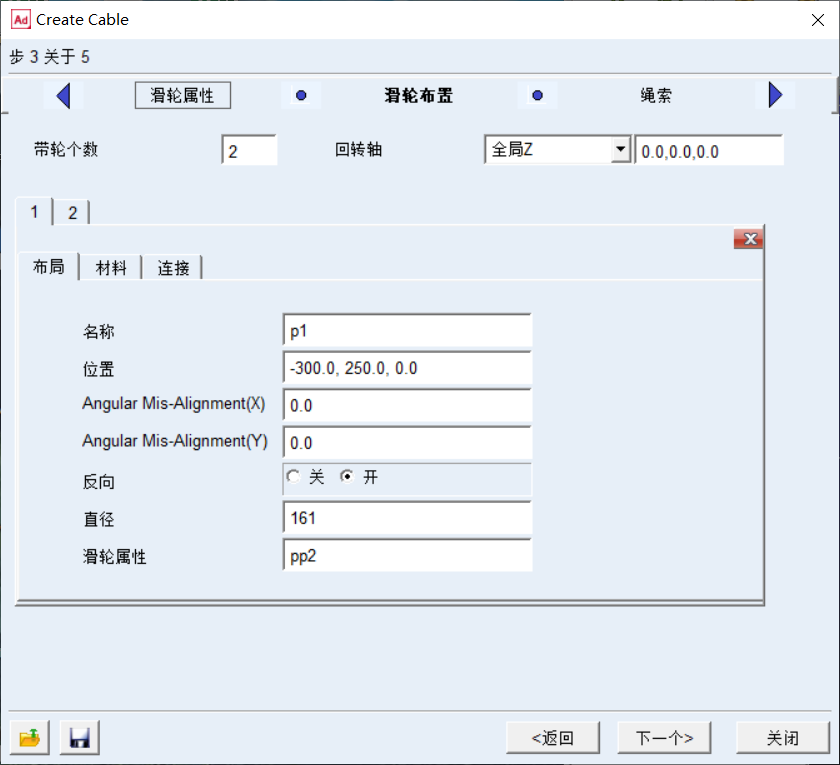
带轮个数按照前面的安排设置2个,回转轴参考全局坐标选择。
名称随便起;位置选择前两个marker点上;角不对齐度不设置;反向 关为逆时针缠线,开为顺时针缠线;直径要大于上面滑轮属性里面depth 的8倍;连接里面这里旋转副连接到到地上,具体根据要求选择。
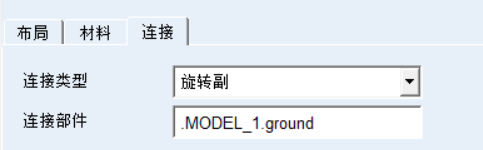
带轮连接方式
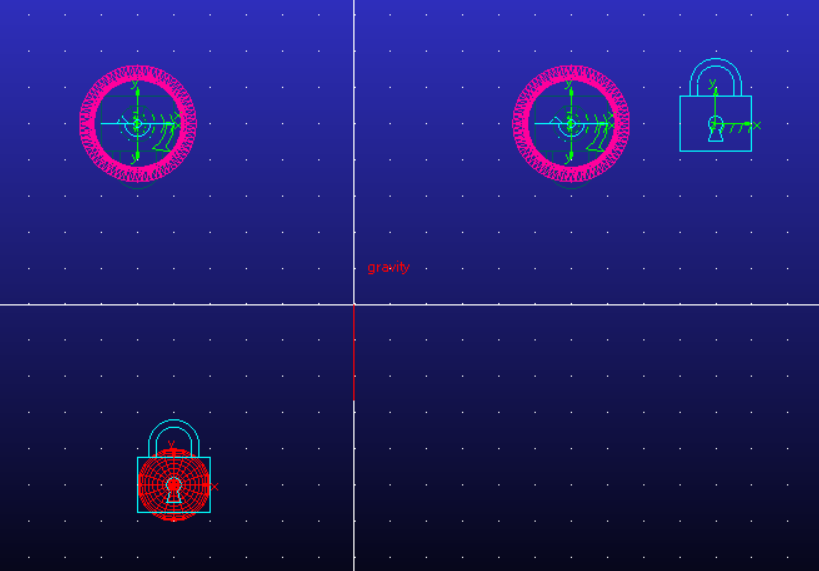
滑轮布置部分完成后显示效果
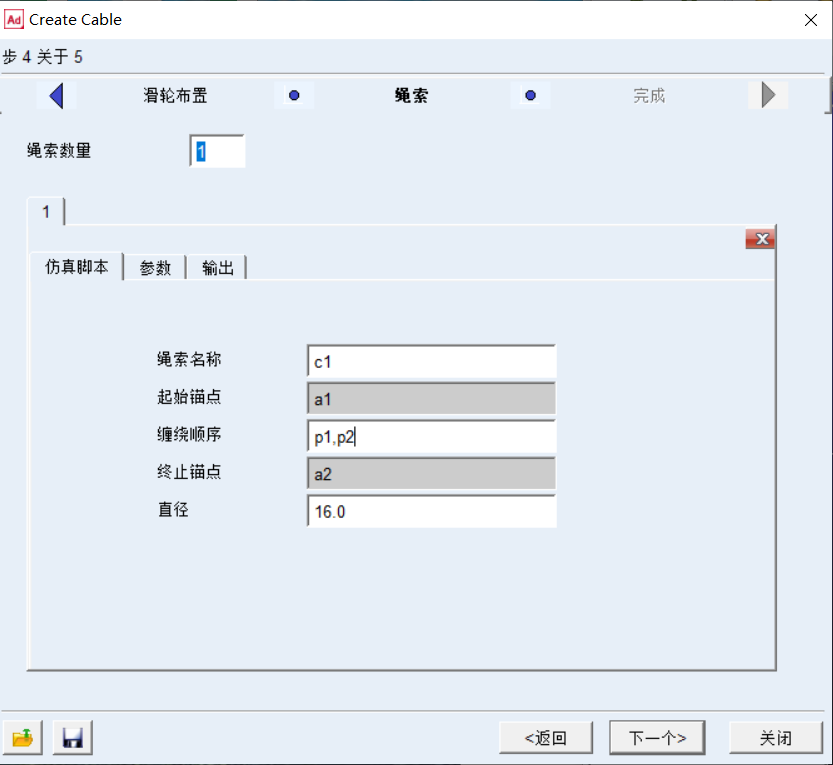
绳子在这个简单的介绍里面一根就够了。
名字随便写;按照顺序输入起始锚点、按顺序选择滑轮、终止锚点,这里的绳子直径16对比前面滑轮属性深度20宽度50是合适的。
绳索设置完成后显示效果
加一个旋转驱动在p2.rev上,点仿真可移动,但只是p2在转,绳子没有变化。
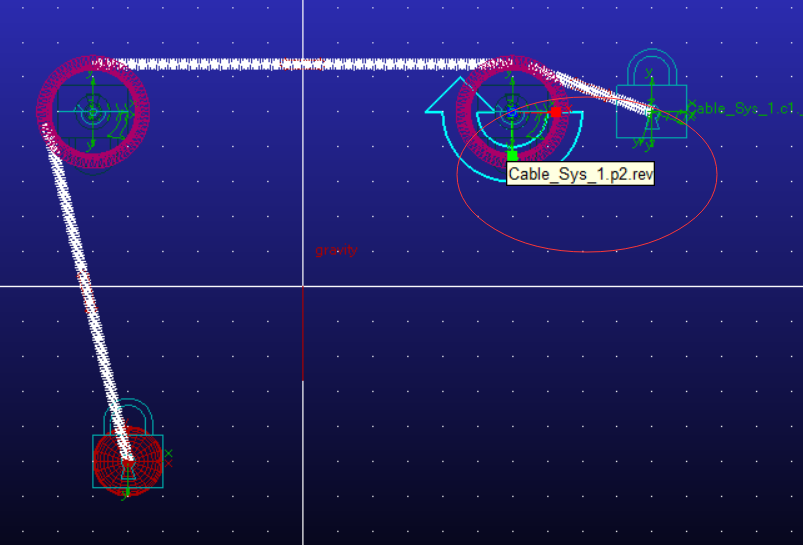
添加旋转驱动
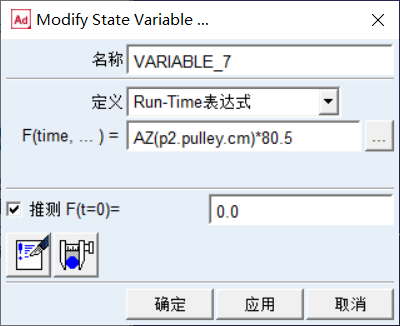
选择一个状态变量,方程为p2的角位移乘以半径,也就是p2的线位移。
然后把这个变量放进a2锚点的winch(绞车)选项里面。这样a2就会根据p2的线位移改变绳子的长度,实现a1的上升或者下降。
注意正负
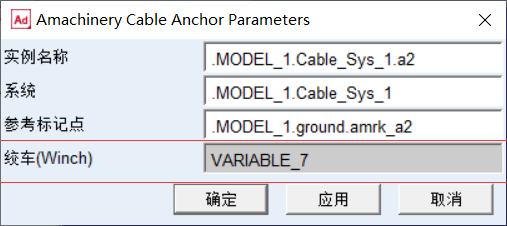
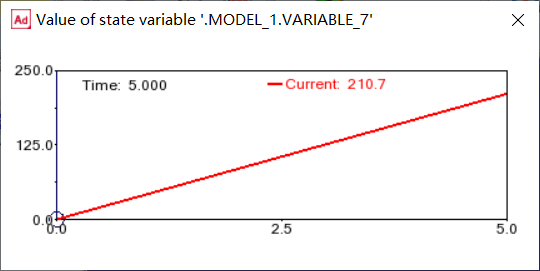
状态变量的正负要和升降相符合 别反了
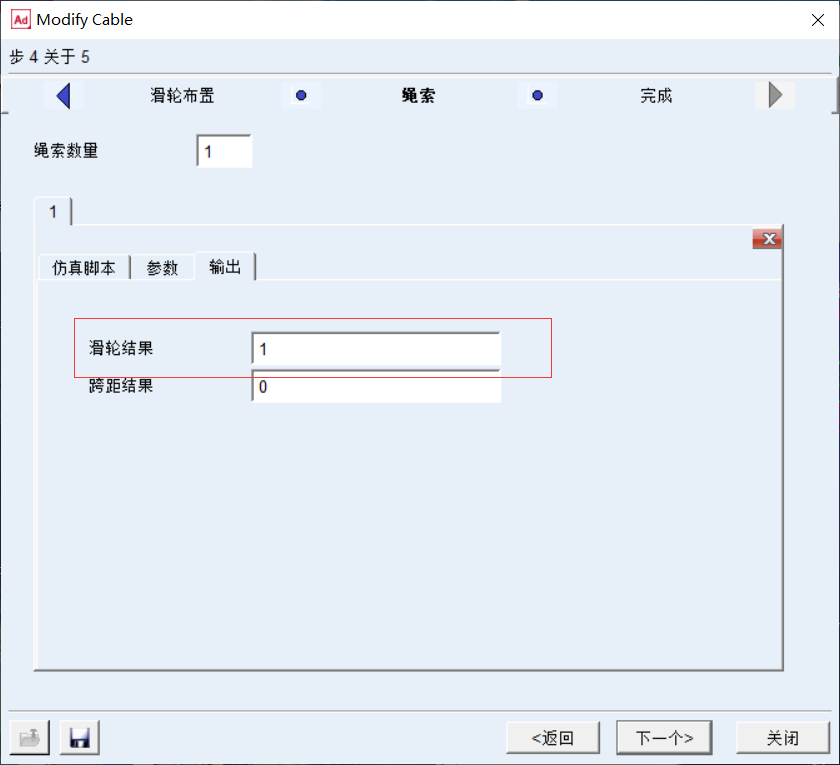
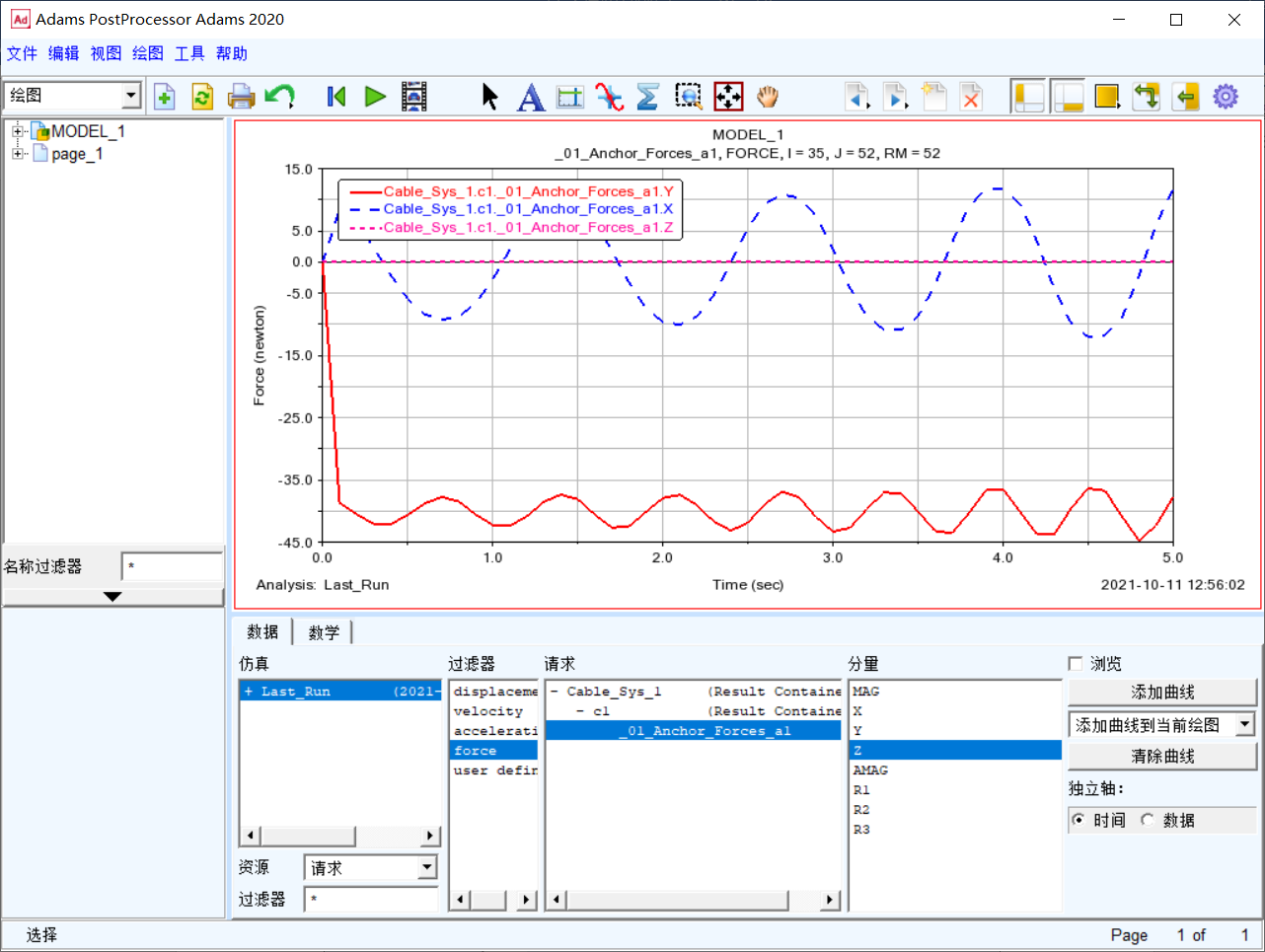
在绳子的输出里面,滑轮结果里面输入1,可以在后处理里面看到锚点1的力。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















