















































软件

产品


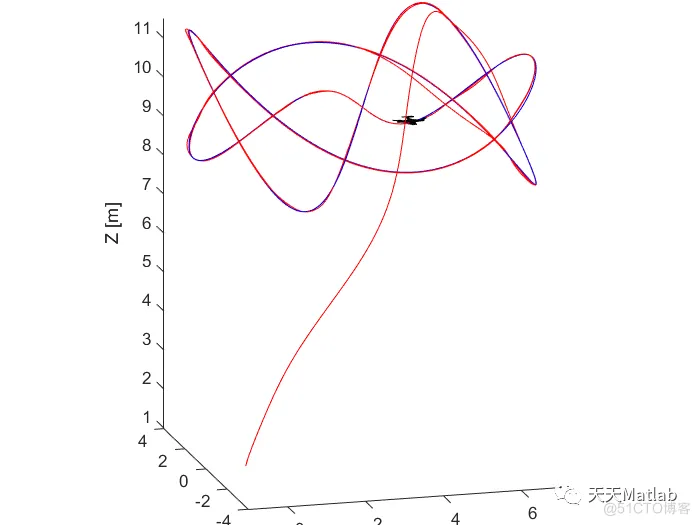
无人机在军用、民用领域具备巨大的应用潜力,当前世界各国正在大力推进无人机的研发工作,而无人机自主控制是无人机研发中极富挑战性的关键问题。
function [xm,ynm,St_Data,ConstraintViolations] = RepairBestSolution(xm,ynm,St_Data)
DroneLocs = St_Data.totalDroneLocs;
m = DroneLocs;
n = St_Data.n;
gammaMax = St_Data.gammaMax;
gammaMin = St_Data.gammaMin;
realYnm = St_Data.realYnm;
UPPERTHRESHOLD = 0.99;
LOWERTHRESHOLD = 0.1;
%% Constraint 3: code to remove duplicate user connections
[~,constNum] = OnlyCheckConstraints(St_Data,ynm,xm); % Check if there are violations
if constNum(3) > 0
AllUsersConnections = sum(ynm,2);
UsersWithMoreConnections = find(AllUsersConnections > 1);
for k = 1:length(UsersWithMoreConnections)
thisUser = UsersWithMoreConnections(k);
currUserTotalConnections = ynm(thisUser,:);
bbb = find(currUserTotalConnections > UPPERTHRESHOLD);
CoverageThisUser = realYnm(thisUser,bbb) == 0;
ynm(thisUser,bbb(CoverageThisUser)) = 0;
if sum(ynm(thisUser,:)) > 1
currUserTotalConnections = ynm(thisUser,:);
bbb = find(currUserTotalConnections > UPPERTHRESHOLD);
[~,indx] = max(sum(ynm(:,bbb)));
ccc = zeros(1,m);
ccc(1,bbb(indx)) = 1;
ynm(thisUser,:) = ccc;
end
end
xm = xm.*(sum(ynm)>0);
ynm(:,~xm) = 0;
end
%% Constraint 5: Constraint Find under-utilized drones, UU:Under-Utilized
[~,constNum] = OnlyCheckConstraints(St_Data,ynm,xm); % Check if there are violations
if constNum(5) > 0
DronesUtilitzation1 = sum(ynm);
DronesUtilitzation2 = xm.*(DronesUtilitzation1 < gammaMin);
UnderUtilizedDrones = find(DronesUtilitzation2 > 0);
for i = 1:length(UnderUtilizedDrones) % LOOP: CHECK FOR ALL UU DRONES
uuDrone1 = UnderUtilizedDrones(i); % Find ith UU drone
nnDrone1 = find(ynm(:,uuDrone1) >= UPPERTHRESHOLD); % Find all connection to ith UU drone
for j = 1:length(nnDrone1) % LOOP: CHECK FOR ALL USERS CONNECTED TO iTH UU DRONE
user1 = nnDrone1(j); % Select jth user connected to ith UU drone
user1PossibleConn = find(realYnm(user1,:) >= UPPERTHRESHOLD); % Find all possible connections for user1
user1PossibleConn(user1PossibleConn == uuDrone1) = []; % Remove UU drone from the list
[~,indx] = sort(sum(ynm(:,user1PossibleConn)),'descend');
for k = 1:length(user1PossibleConn) % LOOP: CHECK FOR ALL POSSIBLE CONNECTIONS
curr = user1PossibleConn(indx(k)); % Collect current possible connection option
% Re-connect this user to some other drone on following
% basis: (1) the user is in range of it, (2) the drone has
% capacity to serve more users, (3) the drone is not under
% utilized, (4) the drone is already deployed
Flag1 = sum(ynm(:,curr))<gammaMax; % Check if the current drone has capacity
Flag2 = sum(ynm(:,curr))>gammaMin-1; % Check if the current drone has capacity
Flag3 = xm(curr) >= UPPERTHRESHOLD; % Check if the drone is already deployed
if Flag1 && Flag2 && Flag3
ccc = zeros(1,m);
ccc(1,curr) = 1;
ynm(j,:) = ccc;
xm(curr) = 1;
end
end
end
end
end
%% Constraint 4: Find over-utilized drones, OU:Over-Utilized
[~,constNum] = OnlyCheckConstraints(St_Data,ynm,xm); % Check if there are violations
if constNum(4) > 0
DronesUtilization = sum(ynm);
OverUtilizedDrones = find(DronesUtilization > gammaMax);
for i = 1:length(OverUtilizedDrones) % LOOP: CHECK FOR ALL OU DRONES
ouDrone1 = OverUtilizedDrones(i); % Find ith OU drone
totalConnections = sum(ynm(:,ouDrone1)); % Find total no. connected users
nnDrone1 = find(ynm(:,ouDrone1) >= UPPERTHRESHOLD); % Find all connection to ith OU drone
%uuOptions = sum(ynm(nnDrone1,:),2); % Find number of possible options for users
OverConnections = totalConnections - gammaMax; % Find over connections
xTemp = 0; % No. of shifted users from OU drone
for j = 1:totalConnections % LOOP: FOR ALL OVER UTILIZED CONNECTIONS
if xTemp < OverConnections
curr = nnDrone1(j); % jth connected user to ith OU drone
user1PossibleConn = find(realYnm(curr,:) >= UPPERTHRESHOLD); % Find all possible connections for jth user
user1PossibleConn(user1PossibleConn == ouDrone1) = []; % Remove OU drone from the list
shiftFlag = 0;
for k = 1:length(user1PossibleConn) % LOOP: CHECK FOR ALL POSSIBLE CONNECTIONS
if shiftFlag == 0
curr = user1PossibleConn(k); % Collect current possible connection option
Flag1 = sum(ynm(:,curr))>=gammaMin-1; % Check if the current drone is not UU
Flag2 = sum(ynm(:,curr))<gammaMax; % Check if the current drone is not OU
Flag3 = xm(curr) >= UPPERTHRESHOLD; % Check if the drone is already deployed
if Flag1 && Flag2 && Flag3
ccc = zeros(1,m);
ccc(1,curr) = 1;
ynm(j,:) = ccc;
xm(curr) = 1;
xTemp = xTemp + 1;
shiftFlag = 1;
end
end
end
end
end
%----------------------------------------------------------------
totalConnections = sum(ynm(:,ouDrone1)); % Find total no. connected users to OU ith drone
OverConnections = totalConnections - gammaMax; % Find over connections
if OverConnections > 0 % If still the ith drone is OU, simply remove extra users randomly
nnDrone1 = find(ynm(:,ouDrone1) >= UPPERTHRESHOLD); % Find all connection to ith OU drone
[~,Indx] = sort(sum(realYnm(nnDrone1,:)),'descend'); % sort users w.r.t. to their connection options
SelectednnDrone1 = nnDrone1(Indx); % rearrange users order according to no. of connection options
ynm(SelectednnDrone1(1:OverConnections),ouDrone1) = 0; % remove those extra users who would have multiple options
xm = xm.*(sum(ynm)>0);
ynm(:,xm <= LOWERTHRESHOLD) = 0;
end
end
end
%% Constraint 7: Repair coverage constraint
[~,constNum] = OnlyCheckConstraints(St_Data,ynm,xm); % Check if there are violations
if constNum(7) > 0
for i = 1:n
for j = 1:DroneLocs
if ynm(i,j) > realYnm(i,j)
currUserConOptions = find(realYnm(i,:) > 0);
[~,indx] = sort(sum(ynm(:,currUserConOptions)),'ascend');
for k = 1:length(currUserConOptions)
CurrDrone = currUserConOptions(indx(k));
ccc = zeros(1,m);
ccc(1,CurrDrone) = 1;
ynm(i,:) = ccc;
xm(CurrDrone) = 1;
end
end
end
end
end
%% Constraint 1: Connect all possible users
[~,constNum] = OnlyCheckConstraints(St_Data,ynm,xm); % Check if there are violations
if constNum(1) > 0
unConnectedUsers = sum(ynm,2) < LOWERTHRESHOLD;
IndexunConnectedUsers = find(unConnectedUsers >= UPPERTHRESHOLD);
for i = 1:length(IndexunConnectedUsers)
curr = IndexunConnectedUsers(i);
user1PossibleConn = realYnm(curr,:) >= UPPERTHRESHOLD; % Find all possible connections for curr user
UsersConnectedToThisDrone = sum(ynm(:,user1PossibleConn));
[~,Sorteduser1PossibleConn] = sort(UsersConnectedToThisDrone,'descend');
connectFlag = 0;
for k = 1:length(Sorteduser1PossibleConn) % LOOP: CHECK FOR ALL POSSIBLE CONNECTIONS
if connectFlag == 0
currDrone = Sorteduser1PossibleConn(k); % Collect current possible connection option
Flag1 = sum(ynm(:,currDrone))>=gammaMin-1; % Check if the current drone is not OU
Flag2 = sum(ynm(:,currDrone))<gammaMax; % Check if the current drone is not OU
% Flag3 = xm(currDrone) >= UPPERTHRESHOLD; % Check if the drone is already deployed
if Flag1 && Flag2
ccc = zeros(1,m);
ccc(1,currDrone) = 1;
ynm(curr,:) = ccc;
xm(currDrone) = 1;
connectFlag = 1;
end
end
end
end
end
%% if still there are under-utilized drones, simply remove them and
% disconnect all users
DronesUtilization = sum(ynm);
UnderUtilizedDrones = DronesUtilization < gammaMin;
ynm(:,UnderUtilizedDrones) = 0; % If there are still UU drones, simply remove them
xm(UnderUtilizedDrones) = 0;
%% Remove all the drones with beta*n more users
BetaUsers = round(St_Data.beta*n);
AdmittedUsers = sum(sum(ynm));
ExtraUsers = AdmittedUsers - BetaUsers;
ConnectionsToEachDrone = sum(ynm);
[~,DroneIndx] = sort(ConnectionsToEachDrone,'ascend');
for i = 1:DroneLocs
if ExtraUsers > 0
ThisDrone = DroneIndx(i);
if xm(ThisDrone) > 0
if ExtraUsers >= ConnectionsToEachDrone(ThisDrone)
ynm(:,ThisDrone) = 0;
xm(ThisDrone) = 0;
ExtraUsers = ExtraUsers - ConnectionsToEachDrone(ThisDrone);
end
end
end
end
%% Connect all possible users
unConnectedUsers = sum(ynm,2) < LOWERTHRESHOLD;
IndexunConnectedUsers = find(unConnectedUsers >= UPPERTHRESHOLD);
for i = 1:length(IndexunConnectedUsers)
curr = IndexunConnectedUsers(i);
user1PossibleConn = find(realYnm(curr,:) >= UPPERTHRESHOLD); % Find all possible connections for curr user
connectFlag = 0;
for k = 1:length(user1PossibleConn) % LOOP: CHECK FOR ALL POSSIBLE CONNECTIONS
if connectFlag == 0
currDrone = user1PossibleConn(k); % Collect current possible connection option
Flag1 = sum(ynm(:,currDrone))>=gammaMin-1; % Check if the current drone is not OU
Flag2 = sum(ynm(:,currDrone))<gammaMax; % Check if the current drone is not OU
Flag3 = xm(currDrone) >= UPPERTHRESHOLD; % Check if the drone is already deployed
if Flag1 && Flag2 && Flag3
ccc = zeros(1,m);
ccc(1,currDrone) = 1;
ynm(curr,:) = ccc;
xm(currDrone) = 1;
connectFlag = 1;
end
end
end
end
%% Remove all the drones with beta*n more users
BetaUsers = round(St_Data.beta*n);
AdmittedUsers = sum(sum(ynm));
ExtraUsers = AdmittedUsers - BetaUsers;
ConnectionsToEachDrone = sum(ynm);
[~,DroneIndx] = sort(ConnectionsToEachDrone,'ascend');
for i = 1:DroneLocs
if ExtraUsers > 0
ThisDrone = DroneIndx(i);
if xm(ThisDrone) > 0
if ExtraUsers >= ConnectionsToEachDrone(ThisDrone)
ynm(:,ThisDrone) = 0;
xm(ThisDrone) = 0;
ExtraUsers = ExtraUsers - ConnectionsToEachDrone(ThisDrone);
end
end
end
end
[ConstraintViolations,~] = OnlyCheckConstraints(St_Data,ynm,xm); % Check if there are violations
A. Ahmed, M. Naeem and A. Al-Dweik, "Joint Optimization of Sensors Association and UAVs Placement in IoT Applications With Practical Network Constraints," in IEEE Access, vol. 9, pp. 7674-7689, 2021, doi: 10.1109/ACCESS.2021.3049360.
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















