















































软件

产品


可参考mathworks推销员行程问题
此示例说明如何使用二元 整数规划 来求解经典的销售员差旅问题。此问题涉及找到一条历经一系列停留点(城市)的最短环程(路径)。在本例中有 200 个停留点,但您可以很轻松地更改 nStops 变量以得到不同规模的问题。对最初的问题进行求解后得到的解会包含子环程。这意味着找到的最优解并没有给出一条穿过所有点的连续路径,而是有几个独立的环路。然后,您将使用迭代过程来确定子环程,添加约束,并重新运行优化,直到消除子环程。
要了解如何通过基于求解器的方法处理此问题,请参阅推销员行程问题:基于求解器。
问题表示
将要进行整数线性规划的销售员差旅问题表示如下:
生成所有可能的行程,意味着经过所有不同停留点对组。
计算每次行程的距离。
要最小化的代价函数是行程中每次旅行的旅行距离之和。
决策变量是与每个行程相关联的二元变量,其中每个 1 表示环程中存在的一次行程,每个 0 表示不在环程中的一次行程。
为确保环程包括每个经停留点,应加入这样一个线性约束:每个停留点都正好涉及两段行程。这意味着一段行程到达该停留点,一段行程离开该停留点。
load('usborder.mat','x','y','xx','yy');
rng(3,'twister') % Makes stops in Maine & Florida, and is reproducible
nStops = 200; % You can use any number, but the problem size scales as N^2
stopsLon = zeros(nStops,1); % Allocate x-coordinates of nStops
stopsLat = stopsLon; % Allocate y-coordinates
n = 1;
while (n <= nStops)
xp = rand*1.5;
yp = rand;
if inpolygon(xp,yp,x,y) % tTest if inside the border
stopsLon(n) = xp;
stopsLat(n) = yp;
n = n+1;
end
end
idxs = nchoosek(1:nStops,2);
dist = hypot(stopsLat(idxs(:,1)) - stopsLat(idxs(:,2)), ...
stopsLon(idxs(:,1)) - stopsLon(idxs(:,2)));
lendist = length(dist);
G = graph(idxs(:,1),idxs(:,2));
figure
hGraph = plot(G,'XData',stopsLon,'YData',stopsLat,'LineStyle','none','NodeLabel',{});
hold on
% Draw the outside border
plot(x,y,'r-')
hold off
tsp = optimproblem;
trips = optimvar('trips',lendist,1,'Type','integer','LowerBound',0,'UpperBound',1);
tsp.Objective = dist'*trips;
constr2trips = optimconstr(nStops,1);
for stop = 1:nStops
whichIdxs = outedges(G,stop); % Identify trips associated with the stop
constr2trips(stop) = sum(trips(whichIdxs)) == 2;
end
tsp.Constraints.constr2trips = constr2trips;
opts = optimoptions('intlinprog','Display','off');
tspsol = solve(tsp,'options',opts)
tspsol.trips = logical(round(tspsol.trips));
Gsol = graph(idxs(tspsol.trips,1),idxs(tspsol.trips,2));
hold on
highlight(hGraph,Gsol,'LineStyle','-')
title('Solution with Subtours')
tourIdxs = conncomp(Gsol);
numtours = max(tourIdxs); % Number of subtours
fprintf('# of subtours: %d\n',numtours);
% Index of added constraints for subtours
k = 1;
while numtours > 1 % Repeat until there is just one subtour
% Add the subtour constraints
for ii = 1:numtours
inSubTour = (tourIdxs == ii); % Edges in current subtour
a = all(inSubTour(idxs),2); % Complete graph indices with both ends in subtour
constrname = "subtourconstr" + num2str(k);
tsp.Constraints.(constrname) = sum(trips(a)) <= (nnz(inSubTour) - 1);
k = k + 1;
end
% Try to optimize again
[tspsol,fval,exitflag,output] = solve(tsp,'options',opts);
tspsol.trips = logical(round(tspsol.trips));
Gsol = graph(idxs(tspsol.trips,1),idxs(tspsol.trips,2));
% Plot new solution
hGraph.LineStyle = 'none'; % Remove the previous highlighted path
highlight(hGraph,Gsol,'LineStyle','-')
drawnow
% How many subtours this time?
tourIdxs = conncomp(Gsol);
numtours = max(tourIdxs); % Number of subtours
fprintf('# of subtours: %d\n',numtours)
end
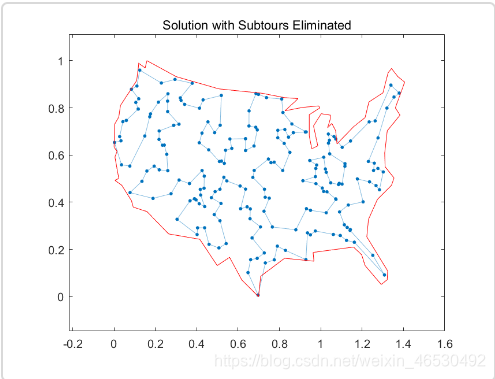
title('Solution with Subtours Eliminated');
hold off
disp(output.absolutegap)
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















