





































































2.4.3 基于Robotics Toolbox的工具箱的模型检测
上文中,我们已经对采摘机器手爪运动学理论模型进行了创建,接下来要用MATLAB软件中的机器人工具箱对创建好的采摘机器手爪运动学理论模型进行校验。
2.4.4 对象模型创建
运用MATLAB软件的Link函数将上文采摘机器手爪已确立的主要参数代入完成整个模型建模。Link函数格式如下:
L=Link([theta,d,a,alpha]) (2.8)
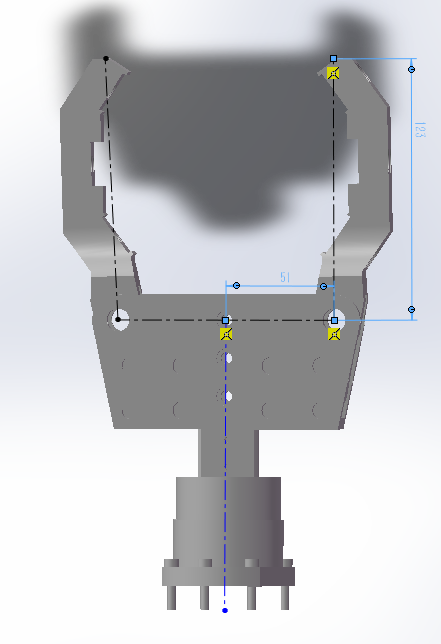
该式中,theata为关节角;d为连杆偏距;a为连杆长度;alpha为连杆转角。通过表2.7的D-H参数,在MATLAB中编写的程序如下图2.8所示: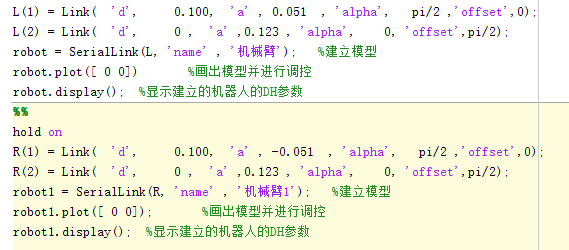
图2.8 Link函数程序
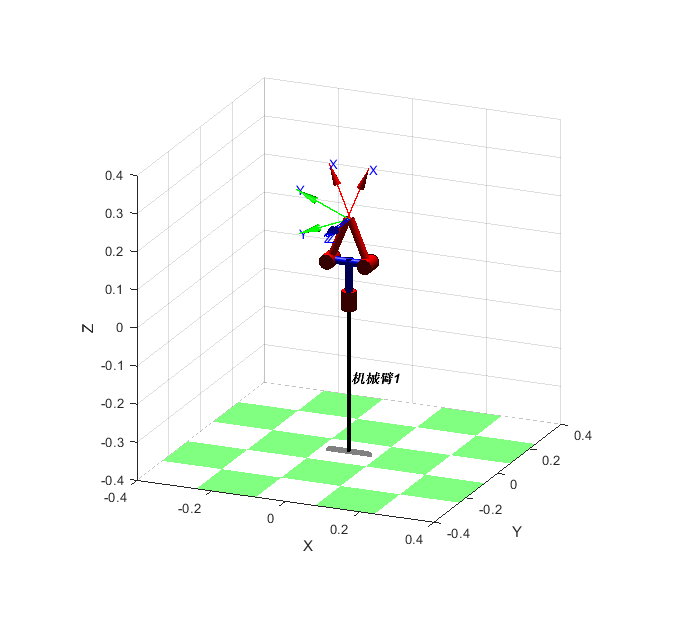
采摘机器手爪的运动学仿真模型由该程序代码在MATLAB软件中运行得出,其模型如下图2.9所示:
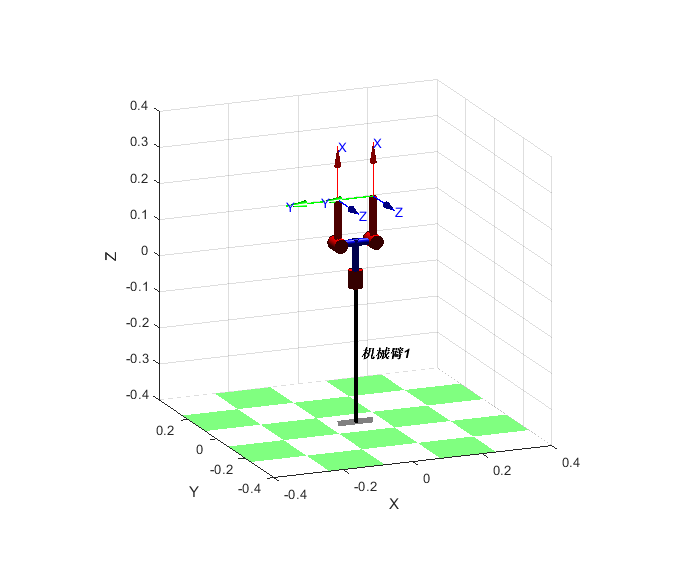
图2.9 机械手运动学模型
2.4.5 运动模型验证
上文已将完成了对采摘机器手爪运动学理论模型的建立。通过设定θ值的大小,可改变机械手姿态和得到对应的末端位置坐标。对采摘机器手爪的运动理论模型验证是通过理论模型得到与由矩阵计算得到的两个末端位置进行比较判断。设定运动模型的起始点和结束点:
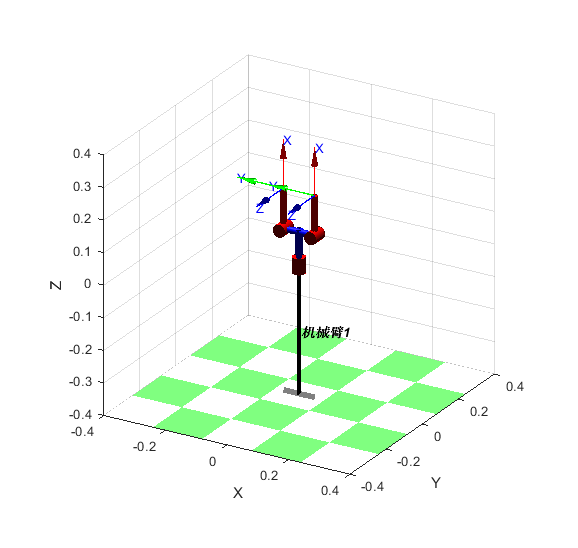
代入公式中求得的采摘机器手爪末端位置坐标与采摘机器手爪运动模型的末端位置坐标相等,证明了采摘机器手爪正向运动学求解方程正确,模型姿态如下图2.10。
.png)
(a)起始姿态
(b)结束姿态
三维模型+word仿真源文件下载见收费内容

 技术文档
技术文档
 推荐好文
推荐好文







 155-2731-8020
155-2731-8020