















































软件

产品


MATLAB具有广泛的 API(应用程序接口),用于从MATLAB 代码构建和修改 Simulink 模型。这可能来自 MATLAB 命令行,来自函数或脚本,或者来自任何可以执行m代码的地方。
本文分享几个用于使用m代码构建和/或操作 Simulink 模型的更常见的函数。主要函数是get_param 和set_param。它们使模型或模块的每个属性都可以分别从 MATLAB 代码中进行检查和更改。请注意,模型中一般有数百个参数,并且对于大多数默认设置就足够了。
本文涵盖的主题是
1、使用 get_param
get_param 是用于检查模型现有属性的主要 MATLAB 函数。
在使用 get_param 之前,必须先将模型加载到内存中。这可以通过手动打开模型或使用 API 函数 load_system 或 open_system 来实现。
get_param 可用于检查感兴趣的特定参数。
>> load_system('simSolverExample')
>> get_param('simSolverExample','Name')
ans =
'simSolverExample'
>> get_param('simSolverExample','Location')
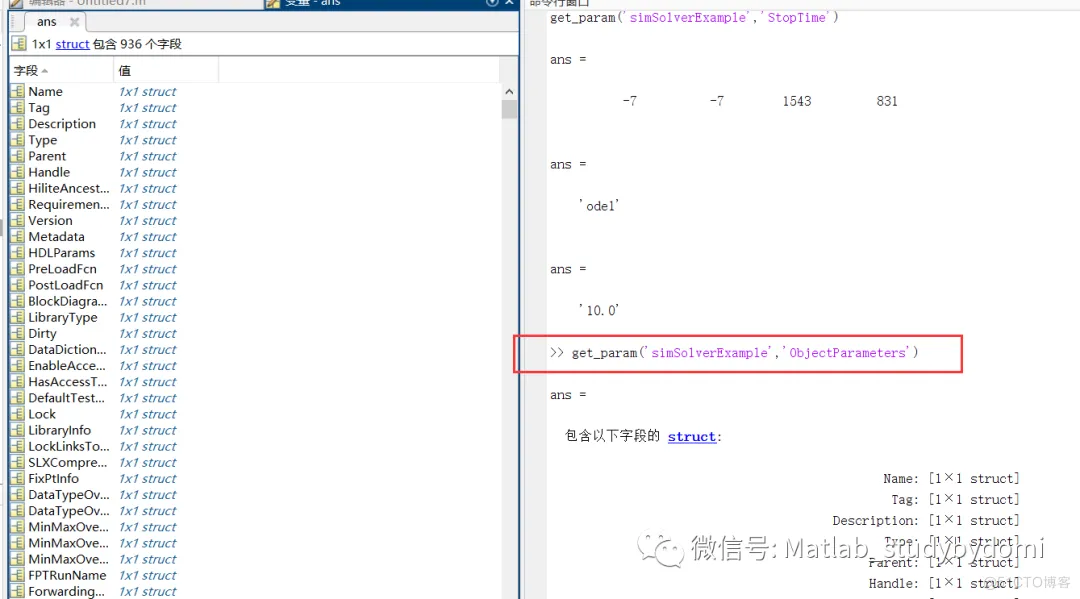
get_param('simSolverExample','Solver')
get_param('simSolverExample','StopTime')
ans =
-7 -7 1543 831
ans =
'ode1'
ans =
'10.0'
get_param 还有一个可选输入,它将返回一个结构数组,其中包含所有参数及其当前值的列表。
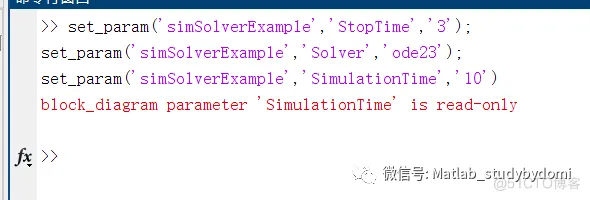
2、使用 set_param
与 get_param 类似的用于修改模型和模块参数的函数称为 set_param。它需要三个输入:要修改的对象(块、模型或信号)的名称;要修改的属性;和新的价值。请注意,某些属性是只读的,因此无法修改。
3、使用 M 代码构建simulink模型
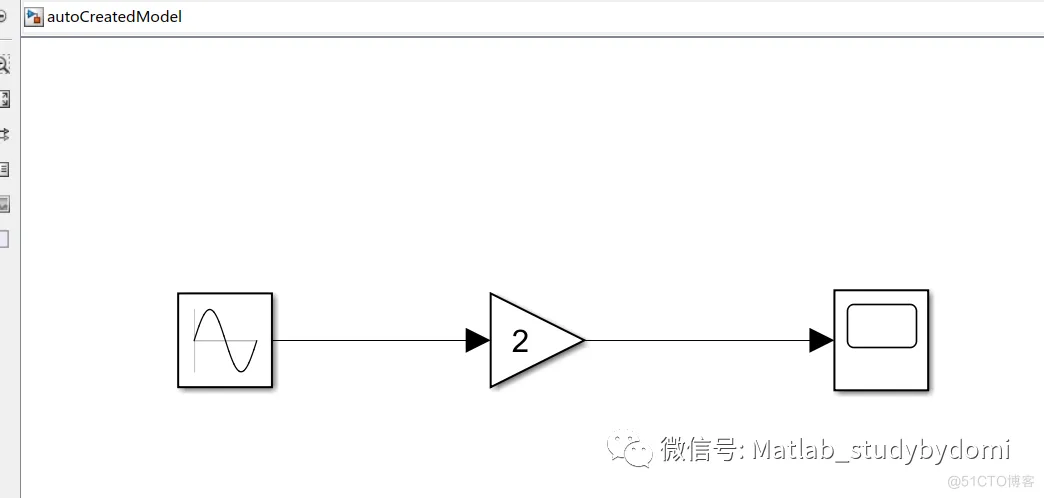
可以使用纯 MATLAB 代码构建 Simulink 模型——无需使用通常的视觉、点击和鼠标操作。虽然很少这样做,但它确实展示了如何使用各种 MATLAB-Simulink API 函数。
function autoCreateModel
fname = 'autoCreatedModel';
if exist(fname,'file') == 4
if bdIsLoaded(fname)
close_system(fname,0)
end
delete([fname,'.mdl']);
end
new_system(fname);
add_block('built-in/Sin', [gcs,'/Sine Wave'],...
'Position', [140 95 170 125],...
'SampleTime','0');
add_block('built-in/Gain', [gcs,'/Gain'],...
'Position',[240 95 270 125],...
'Gain','2');
add_block('built-in/Scope', [gcs,'/Scope'],...
'Position',[350 94 380 126]);
add_line(gcs,'Sine Wave/1','Gain/1')
add_line(gcs,'Gain/1','Scope/1')
set_param(gcs,...
'Solver','FixedStepDiscrete',...
'FixedStep','0.1');
% Save the model
save_system(fname);
上面是一个自动创建模型的 MATLAB 函数示例。代码首先检查具有指定名称的模型是否已经存在,如果存在则将其删除。然后使用 API 函数 new_system 创建一个新模型;使用 API 函数 add_block 和 add_line 构建模型;使用 set_param 修改了一些模型属性(从它们的默认值);最后使用 save_system 保存模型。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















