















































软件

产品


1.算法描述
全球定位系统(Global Positioning System,GPS),是一种以人造地球卫星为基础的高精度无线电导航的定位系统,它在全球任何地方以及近地空间都能够提供准确的地理位置、车行速度及精确的时间信息。GPS自问世以来,就以其高精度、全天候、全球覆盖、方便灵活吸引了众多用户。GPS不仅是汽车的守护神,同时也是物流行业管理的智多星。随着物流业的快速发展,GPS有着举足轻重的作用,成为继汽车市场后的第二大主要消费群体。GPS是美国从20世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位功能的新一代卫星导航与定位系统。
卫星信号的捕获算法是卫星定位接收机的关键,传统的捕获算法通常采用基于fft的相干积分和非相干积分相结合的方法,例如在使用gps信号进行定位和导航前首先需要对卫星信号进行捕获,gps卫星信号的传统捕获算法一般为频域并行捕获算法,频域并行捕获算法的原理框图如图3所示,频域并行捕获算法是一种基于fft的捕获算法,搜索覆盖全部搜索频点和全部伪码序列,对于正常功率的gps信号,通常只需要处理lms的导航数据,就能够完成gps信号的捕获,但是对于gps弱信号而言,通常处理lms的导航数据所获得的判决量并不可靠,难以实现捕获,此时就需要通过增加捕获算法所用的数据长度,采用相关积分和非相关积分相结合的方法,来提高捕获灵敏度,但同时导致fft相关运算的计算量将成倍增长,从而造成捕获速度降低。
为了跟踪和解码GPS信号,首先要捕获到GPS信号。将捕获到的GPS信号的必要参数立刻传递给跟踪过程,再通过跟踪过程便可得到卫星的导航电文。GPS卫星处于高速运动中,因此,其频率会产生多普勒频移。载波频率与C/A码的多普勒频移将在下面详细讲述。
GPS卫星发送的信号一般由3个分量组成:载波、伪码和导航电文,其中伪码和导航电文采用BPSK技术去调制载波。
为了跟踪和解码GPS信号,首先要捕获到GPS信号。将捕获到的GPS信号的数据传递给跟踪过程,再通过跟踪过程便可得到卫星的导航电文。传统的GPS捕获方法有:串行搜索捕获、滑动相关法、循环相关法、PMF算法。
GPS卫星信号是发生在两个L波段频率的载波信号L1和L2,两个载波频率分别是L1的主频率fL1和L2的次频率fL2。在L波段进行调制可以避免拥挤,因为L波段的频率占据使用比率和其他波段相比要低一些,有助于全球性观测;L波段上更容易进行扩频(将低比特率的电文转换成高比特率的组合码,有利于卫星信号的保密性),发送宽带信号;L波段大气偏差和电离偏差小,接收设备可以更简单、更经济地接收和测量。每一颗卫星均有唯一的扩频码或伪随机序列,由此调制出载波频率。
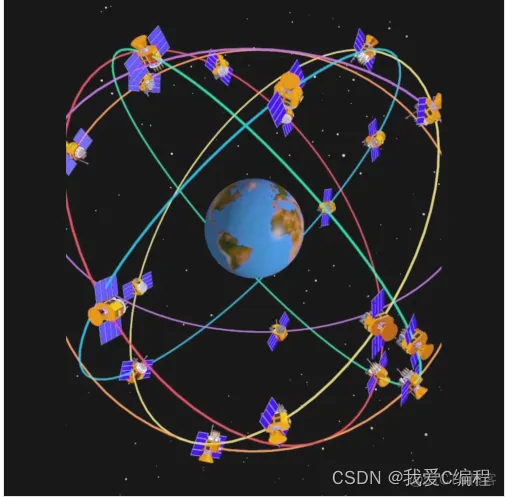
GPS卫星星座由24颗卫星组成,其中21颗为工作卫星,3颗为备用卫星。24颗卫星均匀分布在6个轨道平面上,即每个轨道面上有4颗卫星。卫星轨道面相对于地球赤道面的轨道倾角为55°,各轨道平面的升交点的赤经相差60° ,一个轨道平面上的卫星比西边相邻轨道平面上的相应卫星升交角距超前30°。这种布局的目的是保证在全球任何地点、任何时刻至少可以观测到4颗卫星。
是由洛克菲尔国际公司空间部研制的,卫星重774kg,使用寿命为7年。卫星采用蜂窝结构,主体呈柱形,直径为1.5m。卫星两侧装有两块双叶对日定向太阳能电池帆板(BLOCK I),全长5.33m接受日光面积为7.2。对日定向系统控制两翼电池帆板旋转,使板面始终对准太阳,为卫星不断提供电力,并给三组15Ah镍镉电池充电,以保证卫星在地球阴影部分能正常工作。
在星体底部装有12个单元的多波束定向天线,能发射张角大约为30度的两个L波段(19cm和24cm波)的信号。在星体的两端面上装有全向遥测遥控天线,用于与地面监控网的通信。此外卫星还装有姿态控制系统和轨道控制系统,以便使卫星保持在适当的高度和角度,准确对准卫星的可见地面。由GPS系统的工作原理可知,星载时钟的精确度越高,其定位精度也越高。早期试验型卫星采用由霍普金斯大学研制的石英振荡器,相对频率稳定度为/秒。误差为14m。1974年以后,GPS卫星采用铷原子钟,相对频率稳定度达到/秒,误差8m。1977年,BOKCK II型采用了马斯频率和时间系统公司研制的铯原子钟后相对稳定频率达到/秒,误差则降为2.9m。1981年,休斯公司研制的相对稳定频率为/秒的氢原子钟使BLOCK IIR型卫星误差仅为1m。
2.仿真效果预览
matlab2022a仿真结果如下:


3.MATLAB核心程序
%find delay and frequency offset for SV26:
[temp1, temp2]=max(fdout); %max in each col of fdout
[maxcorr,freq_index]=max(temp1);
delay=temp2(freq_index)-1;
chip_delay=(delay)/2; %in chips since sampled at chip2x
freq= freq_axis(freq_index); % in radians/sample
freqHz= freq*fs/(2*pi); % in Hz
%run again without a return variable to plot result:
figure(1)
fdcorr(rx_seg,prn_code,frange);
%correct course frequency offset:
rotation=[1:length(rx_seg)]'*freq;
rx0= rx_seg.*exp(-j.*rotation);
%align code with signal
codeshift=circshift(prn_code,-delay);
%correlation at aligned frequency and delay:
svcorr= abs(rx0'*codeshift);
%plot aligned result:
figure(2)
fdcorr(rx0,codeshift,frange);
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















