软件

产品


今天给你分享数控编程中的一种威力巨大的方法:
“画出刀具路径图”
这个大招,已经是超级大招了。不过也许有的人会说,这个方法不算啥,早就听过了。
是的,知道并不代表会,用了才有效果。
当你通过画出刀具路径图,你可以直观看到刀路轨迹
这样你可以以鹰的视角来俯视这个零件编程,也可以以鼠目的寸光来研究每一步走刀的细节。
那么这一招在编程种具体怎么应用呢?
举个数铣方面的例子:
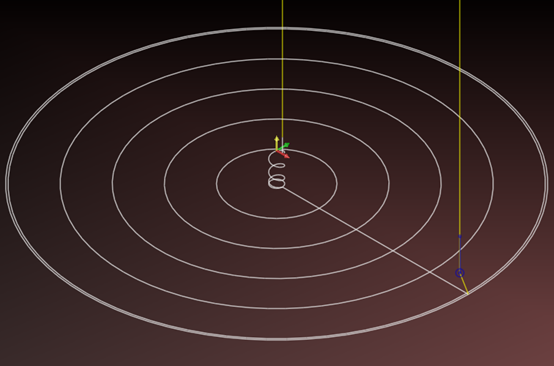
如下零件,直径为D133.2的内孔,深为10,要求加工内圆孔底平面。
如下刀路图:采用螺旋插补下刀,然后由里向外一圈一圈铣至尺寸。
这个刀路程序由两部分组成:
1,螺旋插补下刀程序
2,铣内孔底面程序
关于螺旋插补铣编程思路,我曾经分享过,在这不赘述。
直接上螺旋插补铣程序如下:
……
#10=20
#11=16
#24=[#10-#11]/2
N1
G00 X#24 Y0
Z5.
#1=0
G1Z#1F1000
WHILE[#1GT-10]DO1
#1=#1-4
IF[#1LE-10]THEN#1=-10
G3I-#24Z#1F500.
END1
G3I-#24
....
当完成螺旋下刀之后,此时刀具Z=-10已经螺旋插补下刀到孔底平面,这个时候铣一圈整圆 ,接下来就是铣底孔,刀具路径如下图:
铣圆一圈然后X移动一个步距,再铣一圈整圆,这样依次类推至到图纸最终尺寸。
那么由上刀具路径图,很容易看出,X值不断变化。
怎么变化呢?
也就是X方向移动一个步距 ,假如设变量#2代表步距(X方向每次移动的距离,即步距) 。
若移动的距离是刀具直径的80%,那么:
#2=#2+0.8 *#11
备注:#11是编写螺旋插补铣孔程序的时候我任意设置的刀具直径变量就这样通过变量#2的自增运算,来实现步距的移动。既然设置的变量#2代表步距,通过变量自增运算来实现步距的移动。
那么#2的范围是多少呢?或者换句话说变量#2从哪个坐标点位开始移动,自增运算到哪个点位坐标终止?
如上图所设的变量:
#24螺旋插补下刀至孔底平面这个时候铣一圈整圆此时X方向的变量坐标,也就是#2的初始下刀点。
所以:#2=#24
同过 #2=#2+0.8 *#11 自增
也就是说变量#2自增运算到66.6这个尺寸,这个圆就加工到尺寸了。
由此很容易联系到之前讲过的宏语句,比如WHILE [ ]DO语句
......
有了上面简单分析,那么铣孔低平面程序如下:
N2
#2=#24
WHILE[#2LT66.6]DO2
#2=#2+0.8*#11
IF[#2GE66.6]THEN#2=66.6
G1X#2
G3I-#2F100
END2
.....
好啦,“画出刀具路径图”是个超级棒的编程方法
当你通过画出刀具路径图,你可以直观看到刀路轨迹
这样你可以 以鹰的视角来俯视这个零件编程
也可以以鼠目的寸光来研究每一步走刀的细节
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020