软件

产品


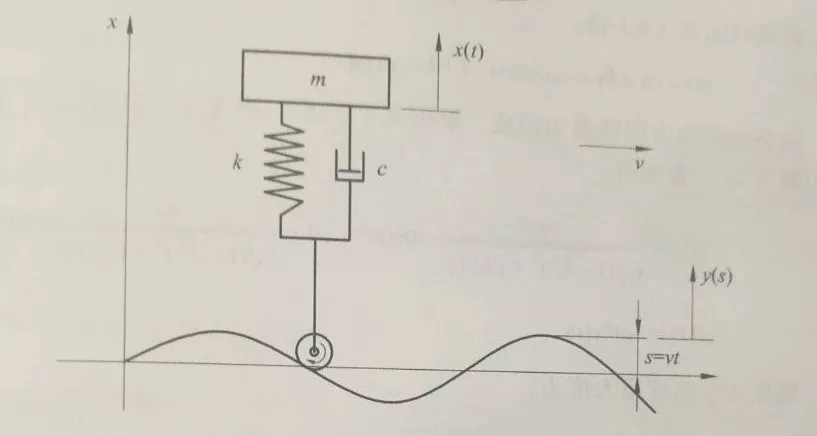
假定车辆在不平顺轨道上匀速行驶,设车体的质量为1000kg,悬挂的刚度k=350kN/m,阻尼比为0.5,车速为100km/h,轨道不平顺呈正弦波形,可表示为y=asin(2*pi/l*s),其中波长l=5m,a=2mm。求车体的振动加速度。简化后的模型如下图所示(懒,不想画图)。
问题非常简单,直接取质量块为隔离体,以轨道不平顺作为激励求解即可,列振动方程求解即可,但笔者想到,在实际情况中列车并非简化如此简单,往往简化成多自由度体系,若涉及到下部基础振动问题求解,还需要进行刚柔耦合分析,考虑轮轨耦合问题等,这种情况下求解析解几乎是不可能的,只能借助数值方法求解。
为了对比正确性,笔者依旧拿此例研究软件求解进行验证。
ANSYS中在动力学问题已非常强大,大致为以下几类:
一、显式动力学:AUTODYN;LSDYNA
二、隐式动力学:瞬态分析;模态—谐响应;谱分析;随机振动
三、多刚体动力学:Ragid Dynamics
其最根本区别为求解方法的不同,显式算法不存在迭代与收敛的问题,求解稳定性高,但是求解代价较大,一般用于如爆炸、冲撞等类极短时间内的仿真分析。而隐式算法可能由于各种原因求解失败,但是相对于显示动力学来讲,求解代价大大减小,像很多动力学的问题用LSDYNA与AUTODYN求解显得大材小用了,直接隐式求解即可。多刚体动力学,顾名思义,所有的构件全部简化为刚体,不存在变形体的问题。
笔者认为,在轨道动力学的分析中,如果只研究车体的振动,直接将车辆简化成多刚体即可,再以不平顺作为位移激励,如果要研究下部振动,则直接显示求解即可,轨道上部仍作为刚体,轨道下部取成变形体即可,或者用LSDYNA求解,但是没有必要,计算时间太长,求解代价也非常大。下面直接进入正题,具体操作过程如下所示:
1. 模型的建立
本题为单自由度体系受轨道不平顺激励,模型可简化成如下所示结构,其中上部为车体(刚体),下部为轮对(刚体),由于本题未考虑轮对质量,故轮对可简化为下图所示正方体,其作用是方便施加钢轨不平顺激励(激励是不能施加于弹簧下侧节点处的)。
2. 材料设置
根据题意,设置车体质量为1000kg,具体过程不与赘述。
3. 接触及运动副设置
3.1弹簧设置
车体与轮对之间已简化成弹簧-阻尼系统,直接在轮对与车体上下两个表面建立弹簧,如图所示
关于阻尼的设置,由本题知阻尼比为0.5,阻尼比与阻尼存在的关系如下:
由上式可知阻尼约为18708 N·s/m
关于Remote Attachment、Remote Force、Remote displacement,以及远程点行为,Pinball区域问题,建议参考周炬Workbench静力学那本书,讲的比较全面,笔者也可能于其余章节讲解。
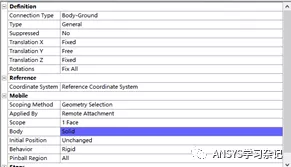
3.2 运动幅设置
对轮对建立对地运动幅,本例建立运动副的目的其实就是刚体自由度的约束,只允许刚体由Y方向的自由度,而不允许转动等等。实际上运动幅非常强大,模拟车轮滚动等等,都可以用运动幅解决。
4.边界条件设置:
1)运动幅已经设定了刚体的自由度,保证刚体只能发生垂向位移,而不能发生横移、纵移及转角等
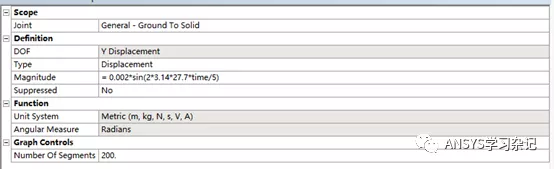
2)对轮对施加运动副位移,如图所示
下面详细说明运动幅设置原因,由于本例的激励为钢轨不平顺激励,实际上也就相当于轮对不断发生位移进而在弹簧的带动下引起车体的位移,假想车往右运动,速度为100km/h,轮对发生上下位移,位移函数也就是上图所示的方程。
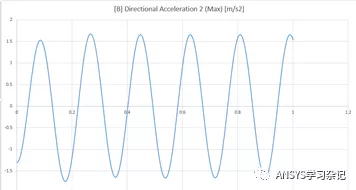
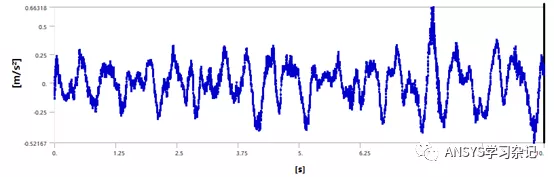
直接求解后即可后处理查看车体的加速度曲线,下图所示:
由图可知,在0.4s后车体进入稳态振动阶段,在稳态阶段加速度峰值为1.658m/s²,约等于1.66m/s²,与理论解完全一致。在非稳态振动阶段,加速度峰值为1.74m/s²
理论推导过程如下:
取车体为隔离体,列系统振动平衡方程:
解上式解微分方程即可求解出加速度峰值为1.66m/s2。
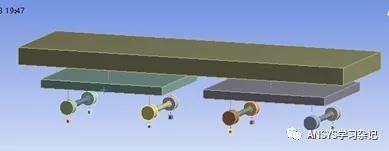
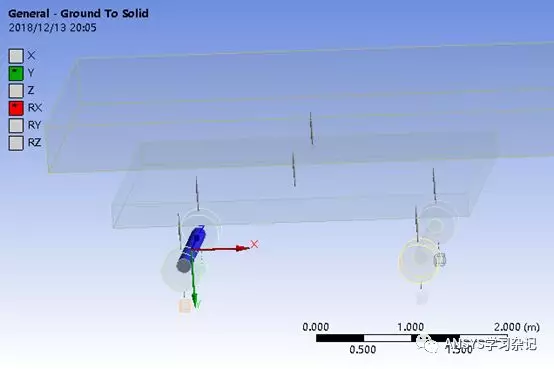
操作过程非常简单,这是由于简化模型的缘故,实际上车体运动并非如此简化,需要考虑轮轨的接触问题,轨道的随机不平顺,若考虑下部基础,还需要进行刚柔耦合的分析,下面拿双转向架考虑此问题,求解不平顺情况下车轮,转向架及车体的加速度曲线。
步骤如下:
1. 建模:较为简单,不予赘述
2. 材料设置:由于本例为多刚体在不平顺激励下得响应,直接根据需要设置刚体的密度,即可得到质量,如下图代表车体,设置后直接赋予到车体上即可。
3.车辆悬挂设置:
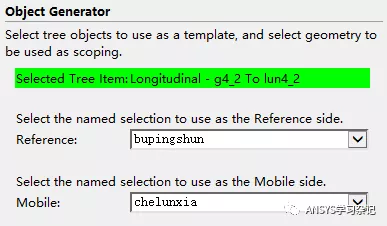
弹簧设置,同例题一样设置车体的悬挂刚度,由于弹簧连接较多,可采用批量生成弹簧的方法,由于过程较为复杂,下面简要说明,首先建立单个弹簧,如轮对与不平顺之间的弹簧,再分别定义轮对与转向架的选择集,最后view object generate生成。
4.刚体自由度设置:
方法有二种,第一种是对刚体施加远程约束,第二种是JOINT对地约束设置,如车轮在行车过程中具有垂向及侧滚自由度,直接选取车轮设置对地joint,然后约束某方向自由度。
读者可能会有疑惑,为何不设置绕Z轴旋转的自由度,这是因为车辆在不平顺轨道行进,相当于不平顺在轨道上反向行驶,车不动,不平顺在动。其它同理进行设置,若遇到批量设置joint问题,参见上文。
5. 边界条件设定
1)刚体自由度已通过joint设置
2)Analysis Settings设置10s(本例只计算车体运行10s)
3)不平顺施加:
为了模拟实际情况,本例采用德国低干扰谱,计算车辆的动力响应,右键Tranisent-joint,选取不平顺施加点,添加已在EXCEL处理好的时间-不平顺激励。
6. 后处理
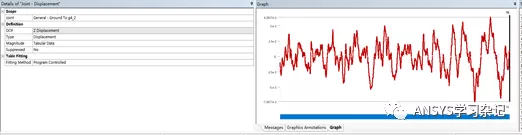
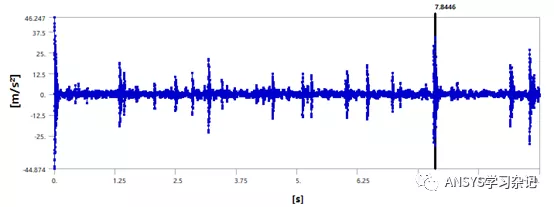
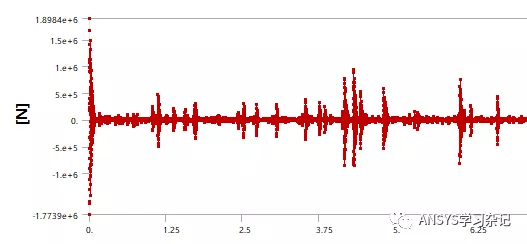
分别查看车体加速度、转向架加速度轮轴对不平顺弹簧反力(即轮轨力)等。
由图可得到车体及转向架加速度的大致分布,以及轮轨力大多为几十kN,及少数情况下,轮轨力超过100kN,这与实际情况是相符的。分析大致就结束了,但是实际的分析远远不止如此,有限元算完后,才是一个分析的真正开始,首先判断自己的结果是否在误差范围之内,在分析为何会出现此种情况,后处理远远不止插入几个加速度变形曲线等这么简单,还需要更为深入的了解,深入的分析。
通过以上算例我们可以知道在不平顺情况下车体加速度,轮轨力等等,但是如果涉及到轨道下部基础的变形该如何处理呢?这就是刚柔耦合的内容,workbench在此方面也非常成熟,如果有时间的话,笔者也会进行演示。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020