















































软件

产品


气隙网格的角度映射
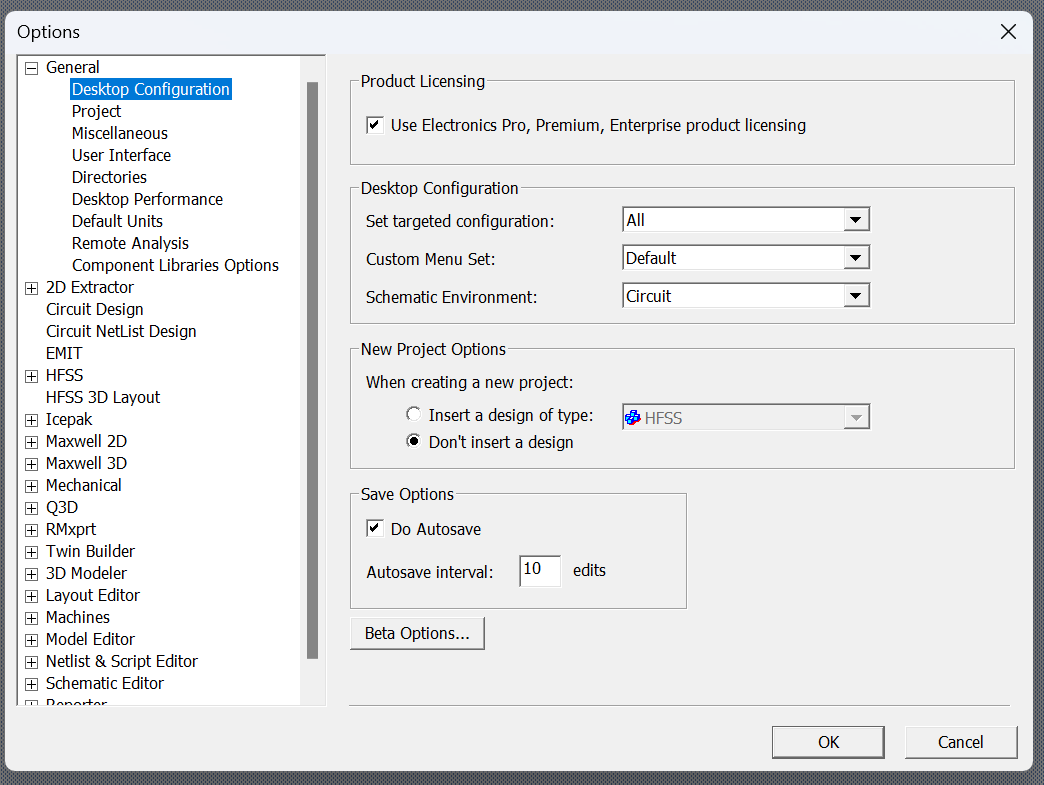
首先来看看什么是气隙网格的角度映射。在2023R1之前的版本,不管你创建二维旋转运动分析还是创建一个三维旋转运动分析,软件都会自动增加一个网格设置选项,叫CylindralGap。
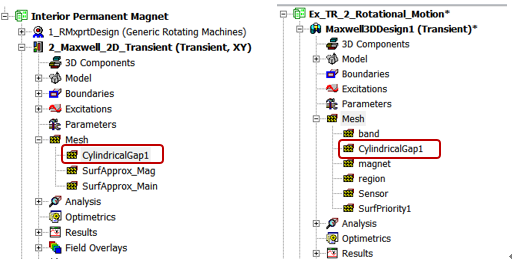
但是,在二维瞬态分析中,双击打开这个选项会发现,什么都无法定义。
但是如果打开三维运动分析中的这个选项,就可以看到这样的一个界面。
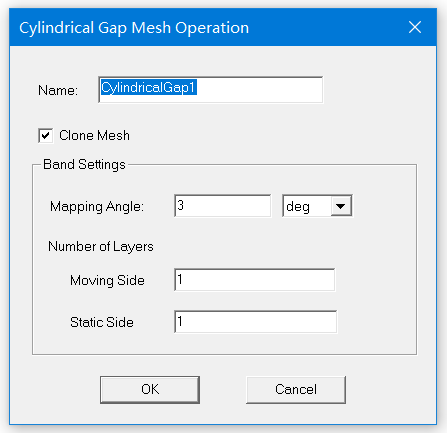
如果选中了界面中Clone Mesh功能,下面就会多出两个选项,分别是Mapping Angle 和Numbers of Layers。这两个功能分别用来定义气隙在旋转方向上的网格映射角度和径向的网格层数。而这次的新功能,要体验的就是这个Mapping Angle。

什么是Mapping Angle
进行网格划分时,运动物体与静止物体之间的界面处容易因为网格节点干涉而导致报错。而使用了Mapping Mesh功能就可以通过时间步长进行调整动静交界面的网格。调整后,使每个时间步长的旋转角度等于每个网格段在旋转方向上跨越的角度,这样,Band域的网格将在每个时间步长上都与的静止区域上的网格相匹配。不仅可以避免报错、减少网格带来的误差、也降低了扭矩的波动,提高了模拟精度。
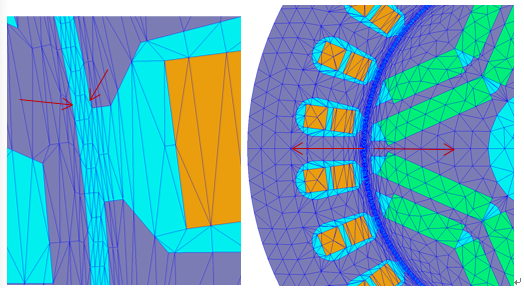
比如这样的个电机,如果我激活了Clone Mesh,同时定义Mapping Angle是1度,动、静侧各有三层网格。就会得到这样的网格结果,band域边界的网格是这样的。
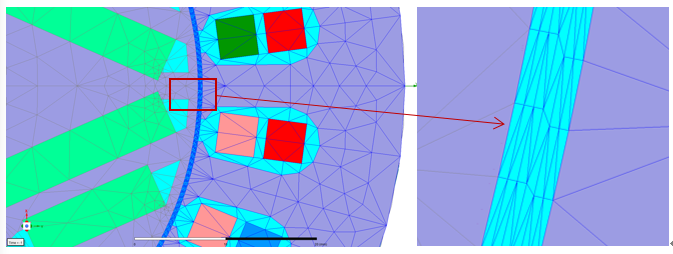
可以看出来每个网格的跨度是一致的,都是刚才定义的1度,而且边界两侧都均匀分布着3层网格。
官方推荐的映射角度是:
推荐的Band映射角度通常等于转速乘以时间步长。例如,如果转速是每秒1.5度,时间步长是2秒,那么Band映射角度应该是1.5 x 2 = 3度。
接下来再来看看新增的二维角度映射的定义。
二维分析中,这是一个测试功能,所以首先需要手动激活测试项。
激活的办法是:
激活办法
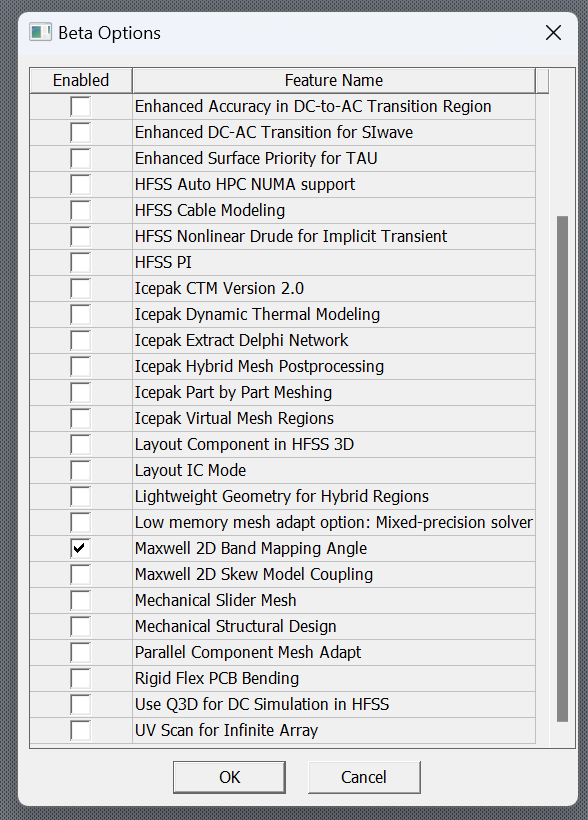
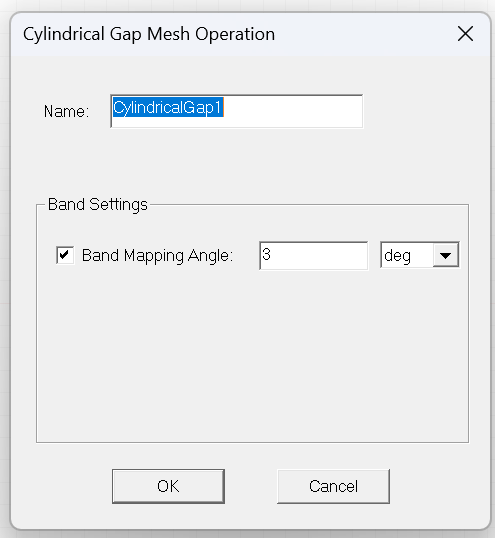
这样,再次打开一个二维运动分析的CylindralGap时,就可以看到,已经新增了一个设置映射角度的选项。
应用这个功能后,网格的特点是:
使用注意事项:
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
武汉格发信息技术有限公司,格发许可优化管理系统可以帮你评估贵公司软件许可的真实需求,再低成本合规性管理软件许可,帮助贵司提高软件投资回报率,为软件采购、使用提供科学决策依据。支持的软件有: CAD,CAE,PDM,PLM,Catia,Ugnx, AutoCAD, Pro/E, Solidworks 等。
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















