















































软件

产品


本文主要介绍在ADAMS软件中实现并联机器人动力学仿真的过程,主要实现如下功能:
本文以4-PUS/PS并联机器人为例,首先将在三维建模软件(如SolidWorks、Proe等)中建立好的机器人三维模型,另存为x_t格式,并导入ADAMS软件。提示: 1 模型导入前建议对模型进行适当简化,去掉螺纹孔、螺钉等不重要的特征或零部件;2 导入时尽量选择全英文路径; 3 导入时建议勾选【Explode Assembly】,方便后续对模型进行整理。
导入完成的结果如下图: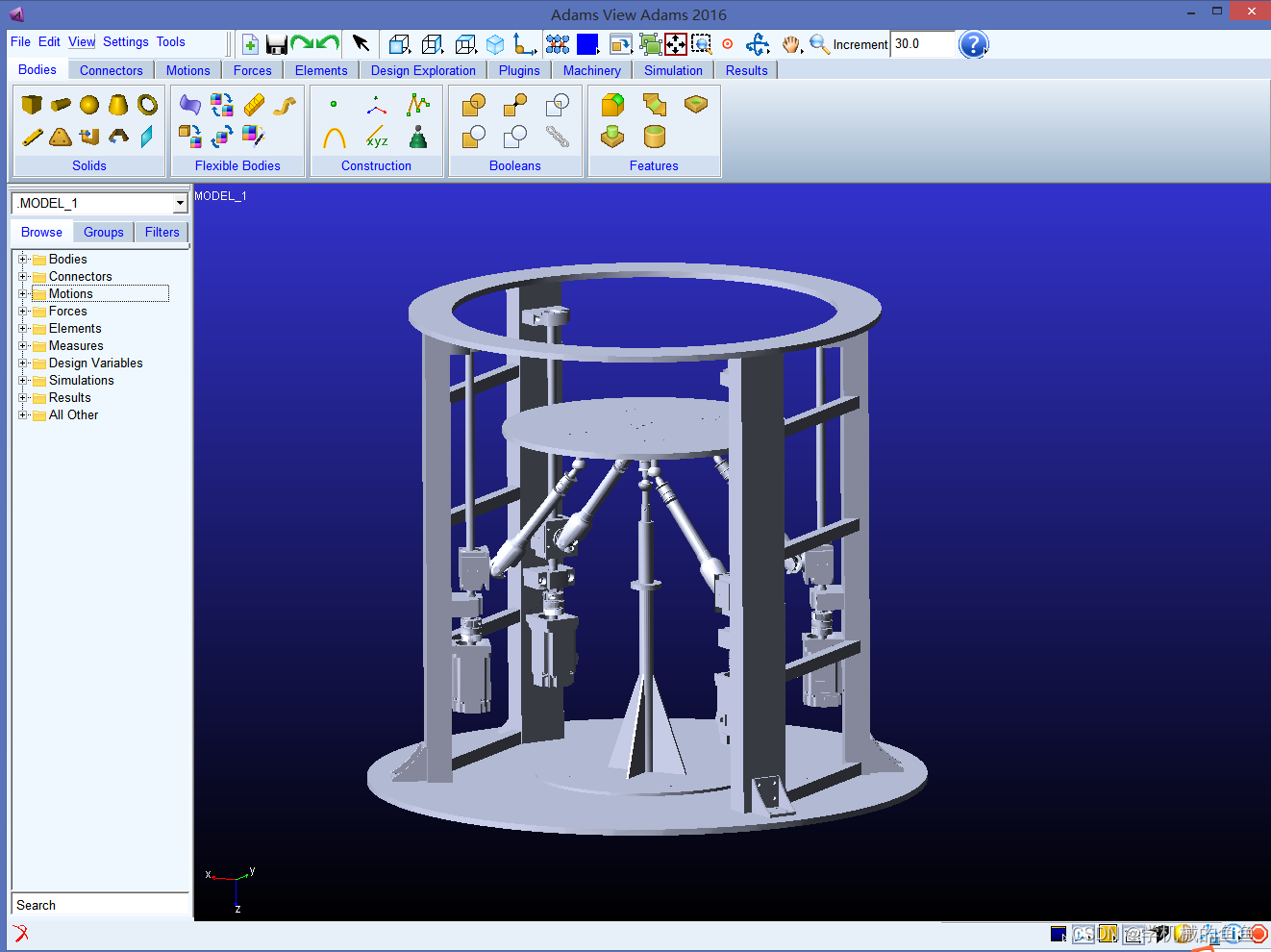
根据机器人关节进行设置,在机器人基座与groud之间添加固定约束;其余各关节依据机器人实际情况添加转动关节或移动关节。
本例中涉及的运动副为移动副、球副、十字铰链(可视为两个转动副),且本例中机器人连杆数目较多,对连杆进行编号。
具体过程不再详细赘述,如有疑问可参考前期串联机器人添加运动副的过程,添加完成如下: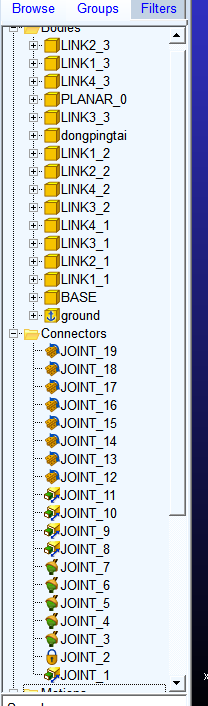
提示:对于复杂结构的机器人,建议每添加完一个运动副之后都对关节轴线进行检查
机器人的坐标系建立如下: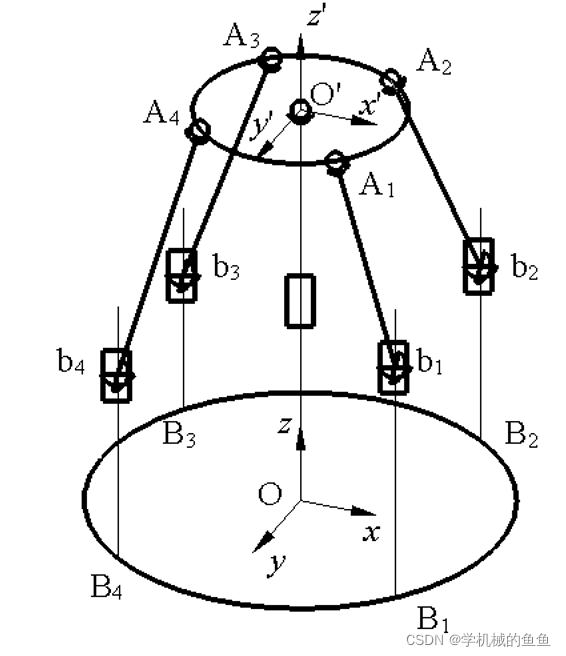
机器人动平台质心期望的运动轨迹为: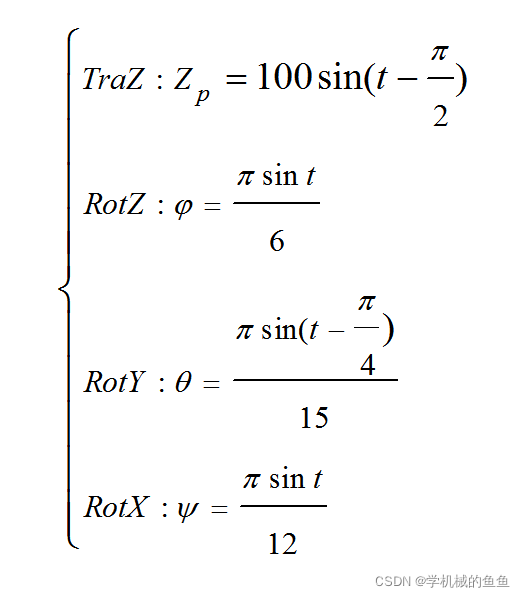
在机器人质心与ground之间添加motion,因为涉及姿态,故选择General point motion
按要求添加运动,如下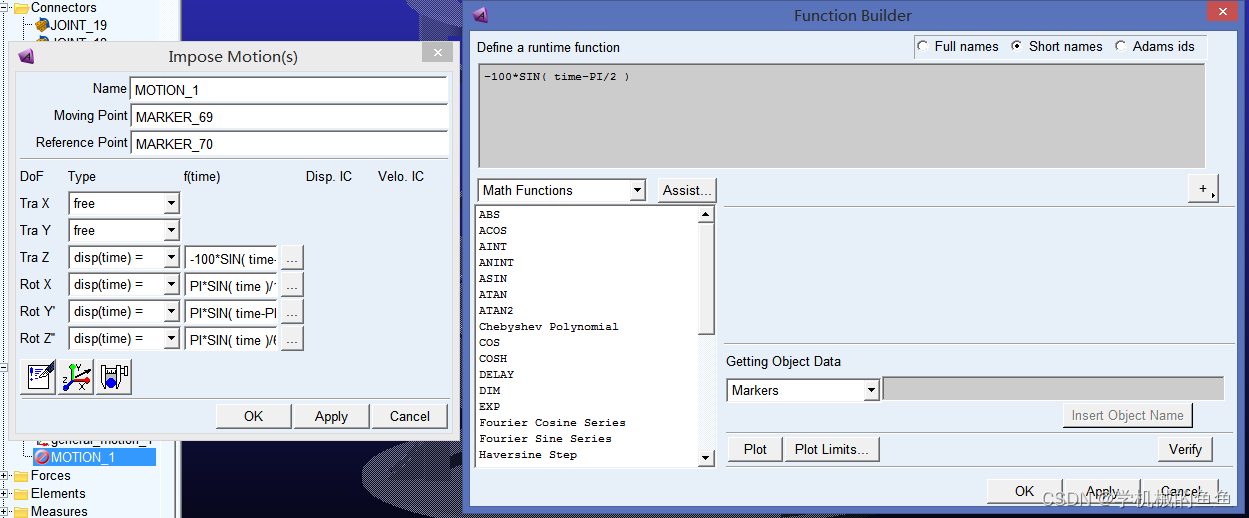
设置重力、机器人各部分质量、动平台受到外部力等参数,根据实际情况精确建模
本例中在动平台质心处施加外力和力矩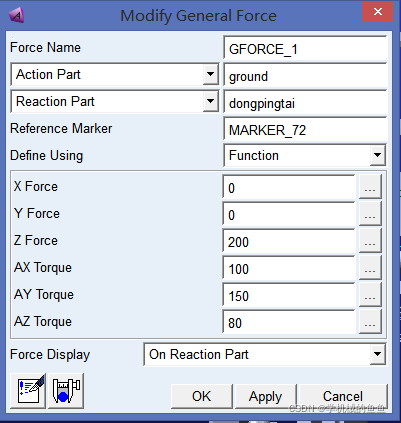
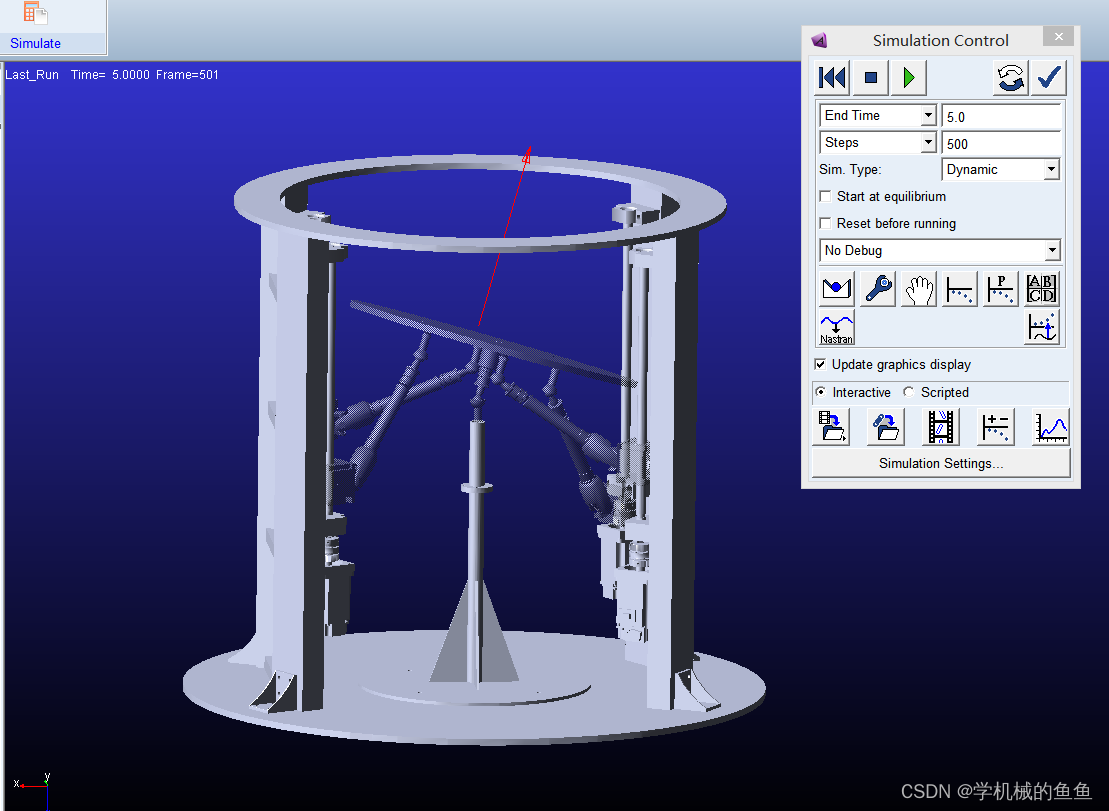
设置仿真时间为5s,仿真步数为500步,仿真类型选择Dynamic即可。
红线即展示的机器人动平台的受力情况
仿真完成之后,可以通过邮件点选需要测量的关节,选择Measure,选择需要得到的数据,在此选择JOINT_11,测量力的幅值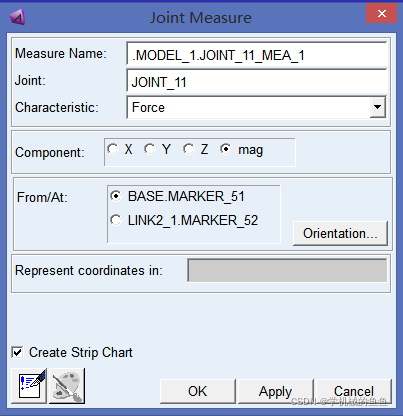
结果如下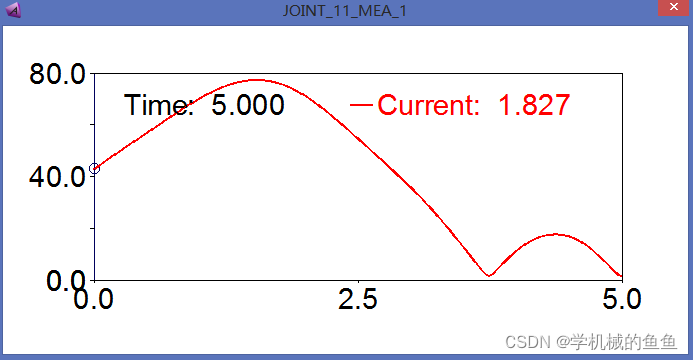
可以通过在上图中点选右键,进入后处理模块,实现四个关节驱动力值进行绘制图像、查看、导出等功能。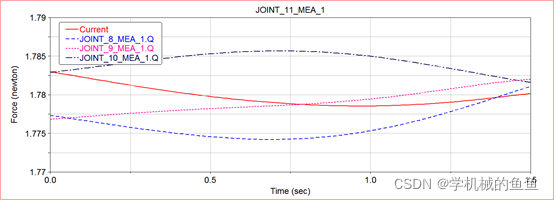
以上就是本文要分享的内容,如果有困惑或疑问,可以在评论区留言~
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 推荐好文
推荐好文






 155-2731-8020
155-2731-8020




















