















































软件

产品


使用的 数据集 :TUM RGB-D and KITTI
在每个序列上重复进行了10次实验,由于动态物体易增加实验结果的不确定性。
ground-truth 是由高精度的动作捕捉系统记录的。
其中两个序列:
1.sitting(s)序列:
两个人坐在桌子前边,说话并且打着手势。属于低动态的场景。
2.walking(w)序列:
两个人在前景和背景中走并且坐在桌子前面。是一个高动态的场景,对于标准的SLAM系统有很大的挑战性。
针对着两种场景,有四种相机运动:
1.半球体运动:相机沿着直径1m的半球体的 轨迹 移动
2.xyz:相机沿着x,y,z轴运动
3.rpy:相机在横滚、俯仰和偏航上旋转
4.静止:人工操作保持相机禁止
评价计算方法:使用绝对轨迹RMSE作为误差测度。
实验1:
在表I中,对六种序列做了测试,被测试的系统分为四类:
1.DynaSLAM(N):只有Mask R- CNN ,分割出先验的动态物体
2.DynaSLAM(G):只用多视几何的方法进行动态目标检测
3.DynaSLAM(N+G):将Mask R-CNN与多视几何的方法相结合进行动态目标检测
4.DynaSLAM(N+G+BI):在使用两种检测方法之后,使用背景修复,然后再进行跟踪和建图
具体实验结果如表I所示: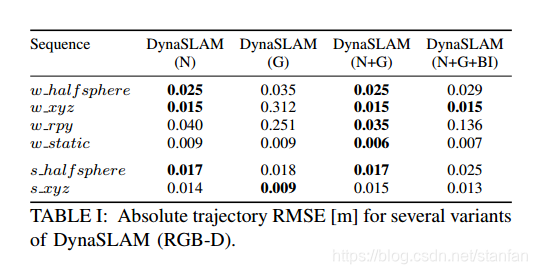
得出的实验结论:
N+G的方案表现效果最好。
Notes :
1.加了背景修复的(N+G+BI)系统效果并不好的原因:
背景的修复严重依赖于相机的位姿。而对于纯旋转的动作,估计的相机位姿有更大的误差这样会导致背景重建的不准确性。
实验2
对比对象:RGB-D ORB-SLAM2
对比结果:
我们的系统在高动态场景中比ORB-SLAM2表现的好,误差值与ORB-SLAM2系统在静态场景相似。
在低动态场景中,追踪结果要稍微差点,跟踪的点找到他们自己比起属于动态物体的点更远(这句话不太理解,大家有好的见解希望交流一下)
实验结果:
表II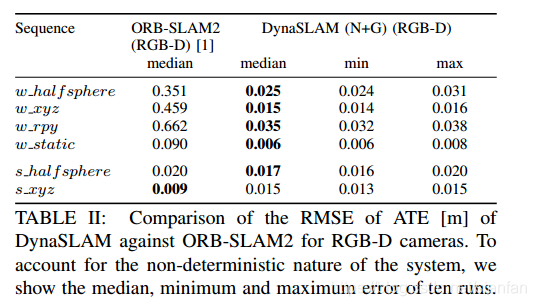
DynaSLAM,ORB-SLAM2与ground-truth轨迹对比图,图7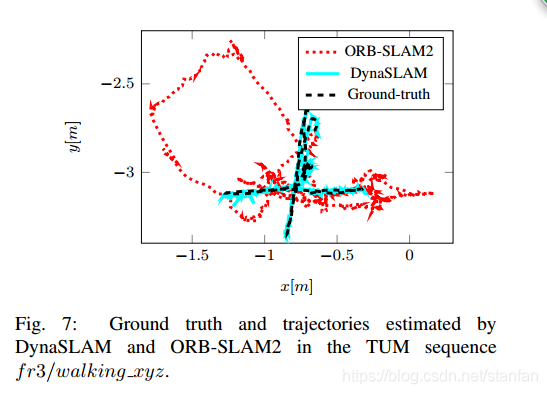
实验3
对比对象:用于动态场景的最好的RGB-D SLAM系统,具体如表格所示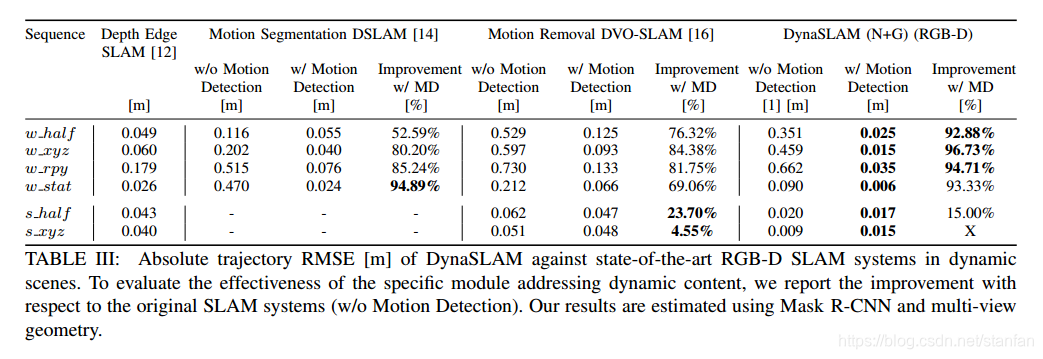
对比结果:动态场景中与最好的系统类似,在动态场景中,我们的系统要更好
实验4
对比对象:ORB-SLAM
对比结果:
虽然精确性稍微比ORB-SLAM要低些,但是在启动系统上要好。
实验结果: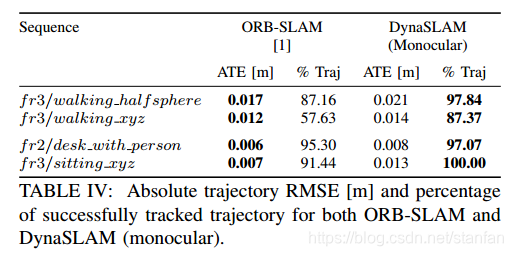
实验5
对比对象:双目ORB-SLAM
使用的度量方法:
absolute trajectory RMSE
average relative translation and rotation errors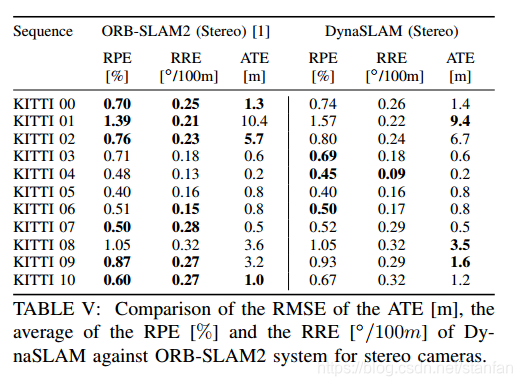
实验6
对比对象:单目变体ORB-SLAM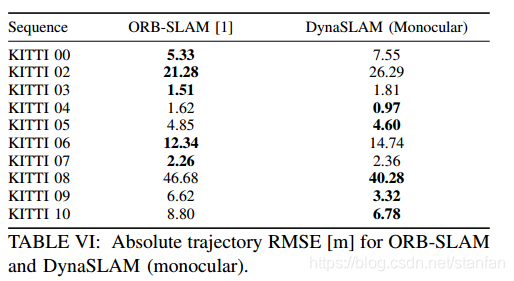
结果基本差不多,但是本次的系统对于动态的内容更鲁棒。
动的物体和可动的物体,是未来工作的一个点,动的物体的点不能用来追踪,可动但未动的物体却可以用来定位,但不用来建图。
免责声明:本文系网络转载或改编,未找到原创作者,版权归原作者所有。如涉及版权,请联系删
 技术文档
技术文档
 热门文章
热门文章






 155-2731-8020
155-2731-8020




















